Contenu de Vinchator
Il y a 205 élément(s) pour Vinchator (recherche limitée depuis 22-juin 13)
Par type de contenu
Voir pour ce membre
#107480 Conversion d'un bras robot pour Vigibot
 Posté par
sur 25 janvier 2020 - 07:38
dans
Vigibot
Posté par
sur 25 janvier 2020 - 07:38
dans
Vigibot
#107478 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:58
dans
Vigibot
Si le but c'est de remplacer ta petite manette avec deux joysticks par ton smartphone avec le robot piloté par internet tu pourra virer la mega et juste la remplacer par une raspberry pi avec une caméra.
La pi peut sans problème piloter L298 et les servo =) et même de quoi piloter des relais pour allumer tes leds et autre =)
En plus vu que tout est sécurisé c'est top! =)
D'accord ca m'a l'air d'être la meilleure solution ca serait moins pratique d'utiliser la communication série entre le Pi et le Mega
Je me demande ou la camera serait la mieux placée
En POV ou à la 3ème personne ?
On ne peut pas en mettre 2 pour un seul robot ?
#107477 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:53
dans
Vigibot
Pour finir le code présent dans l'arduino mega
//Moteur_Base ( DC, 12v, Shield l298n(1a), rotation de la base )
const int Pin_Vitesse_Moteur_Base =10;
const int Pin_Horaire_Moteur_Base =22;
const int Pin_AntiHoraire_Moteur_Base =23;
const int Pin_Joystick_1_X =A0;
//Moteur_Bras_1 ( DC, 12v, Shield l298n(1b), mouvement 1er bras )
const int Pin_Vitesse_Moteur_Bras_1 =5;
const int Pin_Horaire_Moteur_Bras_1 =24;
const int Pin_AntiHoraire_Moteur_Bras_1 =25;
const int Pin_Joystick_1_Y =A1;
//Moteur_Bras_2 ( DC, 12v, Shield l298n(2a), mouvement 2eme bras )
const int Pin_Vitesse_Moteur_Bras_2 =11;
const int Pin_Horaire_Moteur_Bras_2 =28;
const int Pin_AntiHoraire_Moteur_Bras_2 =29;
const int Pin_Joystick_2_X =A4;
//Moteur_Pince ( DC, 12v, Shield l298n(2b), inclinaison pince )
const int Pin_Vitesse_Moteur_Pince =9;
const int Pin_Horaire_Moteur_Pince =30;
const int Pin_AntiHoraire_Moteur_Pince =31;
const int Pin_Joystick_2_Y =A3;
//Servo_Rotation_Pince ( Hitec, 10-190, 6v )
#include <Servo.h>
Servo Servo_Rotation_Pince;
const in Pin_Pot_Rotation_Pince = A6;
int Val_Pot_Rotation_Pince;
int Angle_Rotation_Pince;
//Servo_Serrage_Pince ( Hitec, 10-190, 6v )
Servo Servo_Serrage_Pince;
const in Pin_Pot_Serrage_Pince = A7;
int Val_Pot_Serrage_Pince;
int Angle_Serrage_Pince;
void setup() {
//Liaison serie
Serial.begin(9600);
//Moteur_Base
pinMode(Pin_Vitesse_Moteur_Base, OUTPUT);
pinMode(Pin_Horaire_Moteur_Base, OUTPUT);
pinMode(Pin_AntiHoraire_Moteur_Base, OUTPUT);
//Moteur_Bras_1
pinMode(Pin_Vitesse_Moteur_Bras_1, OUTPUT);
pinMode(Pin_Horaire_Moteur_Bras_1, OUTPUT);
pinMode(Pin_AntiHoraire_Moteur_Bras_1, OUTPUT);
//Moteur_Bras_2
pinMode(Pin_Vitesse_Moteur_Bras_2, OUTPUT);
pinMode(Pin_Horaire_Moteur_Bras_2, OUTPUT);
pinMode(Pin_AntiHoraire_Moteur_Bras_2, OUTPUT);
//moteur_Pince
pinMode(Pin_Vitesse_Moteur_Pince, OUTPUT);
pinMode(Pin_Horaire_Moteur_Pince, OUTPUT);
pinMode(Pin_AntiHoraire_Moteur_Pince, OUTPUT);
//Servo_Pince
Servo_Rotation_Pince.attach(12);
Servo_Serrage_Pince.attach(13);
}
void loop() {
//Moteur_Base
int Valeur_1_X = analogRead(Pin_Joystick_1_X);
int Vitesse_Moteur_Base = Valeur_1_X;
if(Vitesse_Moteur_Base > 510)
{
Vitesse_Moteur_Base -= 510;
digitalWrite(Pin_Horaire_Moteur_Base, HIGH);
digitalWrite(Pin_AntiHoraire_Moteur_Base, LOW);
}
else if(Vitesse_Moteur_Base < 490)
{
Vitesse_Moteur_Base = 490-Vitesse_Moteur_Base;
digitalWrite(Pin_Horaire_Moteur_Base, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Base, HIGH);
}
else
{
Vitesse_Moteur_Base = 0;
digitalWrite(Pin_Horaire_Moteur_Base, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Base, LOW);
}
Vitesse_Moteur_Base /= 2.5;
analogWrite(Pin_Vitesse_Moteur_Base, Vitesse_Moteur_Base);
//Moteur_Bras_1
int Valeur_1_Y = analogRead(Pin_Joystick_1_Y);
int Vitesse_Moteur_Bras_1 = Valeur_1_Y;
if(Vitesse_Moteur_Bras_1 > 510)
{
Vitesse_Moteur_Bras_1 -= 510;
digitalWrite(Pin_Horaire_Moteur_Bras_1, HIGH);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_1, LOW);
}
else if(Vitesse_Moteur_Bras_1 < 490)
{
Vitesse_Moteur_Bras_1 = 490-Vitesse_Moteur_Bras_1;
digitalWrite(Pin_Horaire_Moteur_Bras_1, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_1, HIGH);
}
else
{
Vitesse_Moteur_Bras_1 = 0;
digitalWrite(Pin_Horaire_Moteur_Bras_1, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_1, LOW);
}
Vitesse_Moteur_Bras_1 /= 2.5;
analogWrite(Pin_Vitesse_Moteur_Bras_1, Vitesse_Moteur_Bras_1);
//Moteur_Bras_2
int Valeur_2_X = analogRead(Pin_Joystick_2_X);
int Vitesse_Moteur_Bras_2 = Valeur_2_X;
if(Vitesse_Moteur_Bras_2 > 510)
{
Vitesse_Moteur_Bras_2 -= 510;
digitalWrite(Pin_Horaire_Moteur_Bras_2, HIGH);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_2, LOW);
}
else if(Vitesse_Moteur_Bras_2 < 490)
{
Vitesse_Moteur_Bras_2 = 490-Vitesse_Moteur_Bras_2;
digitalWrite(Pin_Horaire_Moteur_Bras_2, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_2, HIGH);
else
{
Vitesse_Moteur_Bras_2 = 0;
digitalWrite(Pin_Horaire_Moteur_Bras_2, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Bras_2, LOW);
}
Vitesse_Moteur_Bras_2 /= 2.5;
analogWrite(Pin_Vitesse_Moteur_Bras_2, Vitesse_Moteur_Bras_2);
//Moteur Pince
int Valeur_2_Y = analogRead(Pin_Joystick_2_Y);
int Vitesse_Moteur_Pince = Valeur_2_Y;
if(Vitesse_Moteur_Pince > 510)
{
Vitesse_Moteur_Pince -= 510;
digitalWrite(Pin_Horaire_Moteur_Pince, HIGH);
digitalWrite(Pin_AntiHoraire_Moteur_Pince, LOW);
}
else if(Vitesse_Moteur_Pince < 490)
{
Vitesse_Moteur_Pince = 490-Vitesse_Moteur_Pince;
digitalWrite(Pin_Horaire_Moteur_Pince, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Pince, HIGH);
}
else
{
Vitesse_Moteur_Pince = 0;
digitalWrite(Pin_Horaire_Moteur_Pince, LOW);
digitalWrite(Pin_AntiHoraire_Moteur_Pince, LOW);
}
Vitesse_Moteur_Pince /= 2.5;
analogWrite(Pin_Vitesse_Moteur_Pince, Vitesse_Moteur_Pince);
// Servo_Rotation_Pince
Val_Pot_Rotation_Pince = analogRead(Pin_Pot_Rotation_Pince);
Angle_Rotation_Pince = map(Val_Pot_Rotation_Pince, 0, 1023, 10, 180);
Servo_Rotation_Pince.write(Angle_Rotation_Pince);
//Servo_Serrage_Pince
Val_Pot_Serrage_Pince = analogRead(Pin_Pot_Serrage_Pince);
Angle_Serrage_Pince = map(Val_Pot_Serrage_Pince, 0, 1023, 60, 120);
Servo_Serrage_Pince.write(Angle_Serrage_Pince);
//Infos sur moniteur serie
Serial.print("Base IN :");
Serial.print(Valeur_1_X);
Serial.print(" OUT :");
Serial.print(Vitesse_Moteur_Base);
Serial.print(" - Bras1 IN :");
Serial.print(Valeur_1_Y);
Serial.print(" OUT :");
Serial.print(Vitesse_Moteur_Bras_1);
Serial.print(" - Bras2 IN :");
Serial.print(Valeur_2_X);
Serial.print(" OUT :");
Serial.print(Vitesse_Moteur_Bras_2);
Serial.print(" - Pince IN :");
Serial.print(Valeur_2_Y);
Serial.print(" OUT :");
Serial.println(Vitesse_Moteur_Pince);
}
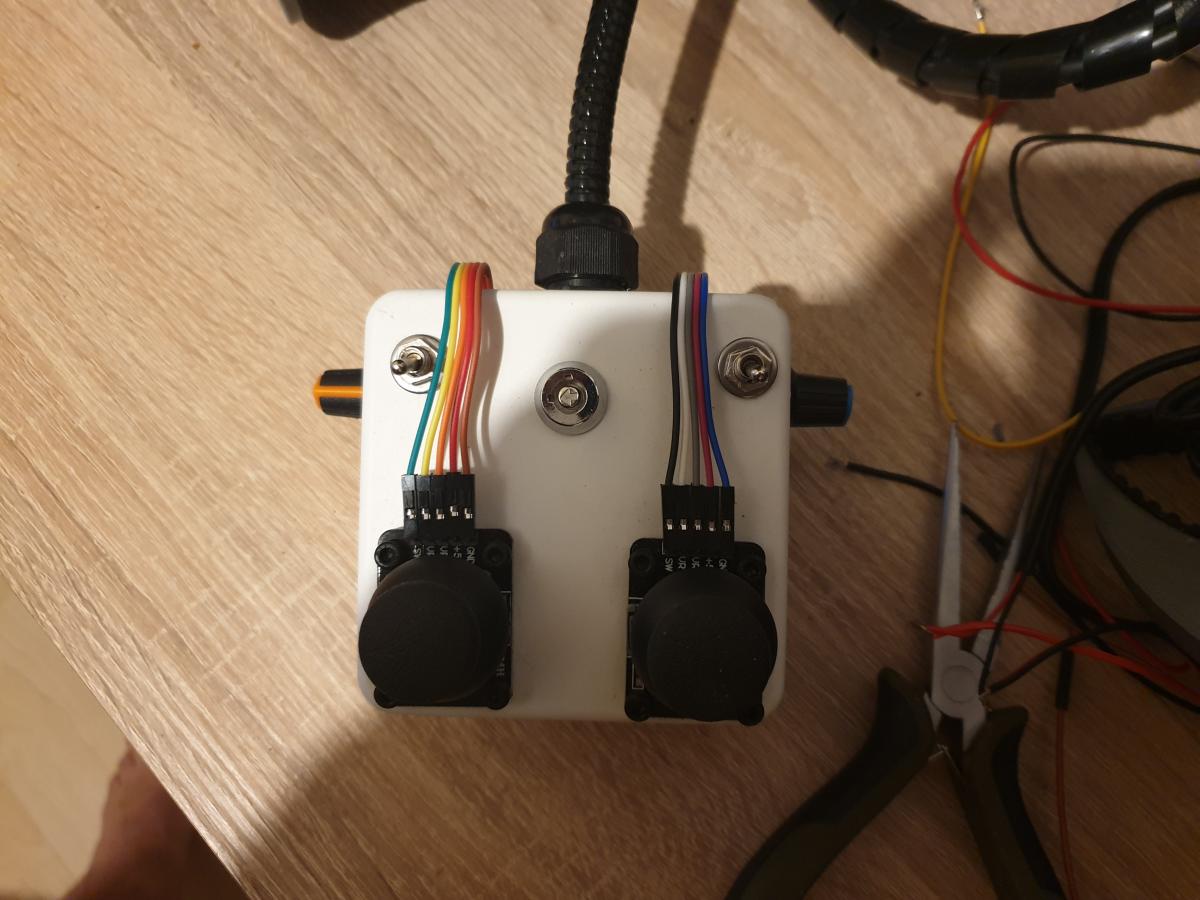
Télécommande sur microcontrôleur
52 : Push_G 53 : Push_D A3 : Axe_X_D
A4 : Axe_Y_D A0 : Axe_X_G
A1 : Axe_Y_G A6 : Pot_G A7 : Pot_D
Sorties contrôle moteur
PWM 10 : EnA(1) Base Vert PWM 5 : EnB(1) - Axe 1 Vert
PWM 11 : EnA(2) Axe 2 Orange PWM 9 : EnB(2) - Pince Noir
PWM 12 : Rotation Blanc PWM 13 : Serrage Noir
Sorties sur microswitch
Base : Num 22 In = Brun Out = Gris In1(1)
Num 23 In = Rouge Out = Violet In2(1)
Axe 1 : Num 24 In = Orange Out = Bleu In3(1)
Num 25 In = Jaune Out = Vert In4(1)
Axe 2 : Num 28 In = Brun Out = Gris In1(2)
Num 29 In = Rouge Out = Violet In2(2)
Pince : Num 30 In = Orange Out = Bleu In3(2)
Num 31 In = Jaune Out = Vert In4(2)
Connecteur moteur
Pin 1 : + Mot2 Pin2 : -Mot2 Pin10 : +Mot1 Pin11 : -Mot1
Pin24 : -Mot3 Pin25 : +Mot3 Pin21 : -Mot4 Pin22 : +Mot4
Pin4 : +Light Pin5 : -Light
Pin7 : PWM Rotation Pin8 : PWM Serrage
Pin19 : + Rotation Pin16 : + Serrage
Pin18 : - Rotation Pin15 : - Serrage
Connecteur microswitch
Pin24 : Secu Anti In1 Pin23 : Secu Anti Out1
Pin22 : Secu Hor In 1 Pin21 : Secu Hor Out 1
Pin17 : Secu Anti In 2 Pin18 : Secu Anti Out 2
Pin19 : Secu Hor In 2 Pin20 : Secu Hor Out 2
Pin1 : Secu Hor In 3 Pin2 : Secu Hor Out 3
Pin3 : Secu Anti In 3 Pin4 : Secu Anti Out 3
Pin5 : Secu Hor In 4 Pin6 : Secu Hor Out 4
Pin7 : Secu Anti In 4 Pin8 : Secu Anti Out 4
*/
#107475 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:47
dans
Vigibot
Image(s) jointe(s)
#107474 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:41
dans
Vigibot
Image(s) jointe(s)
#107473 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:38
dans
Vigibot
Image(s) jointe(s)

#107472 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:33
dans
Vigibot
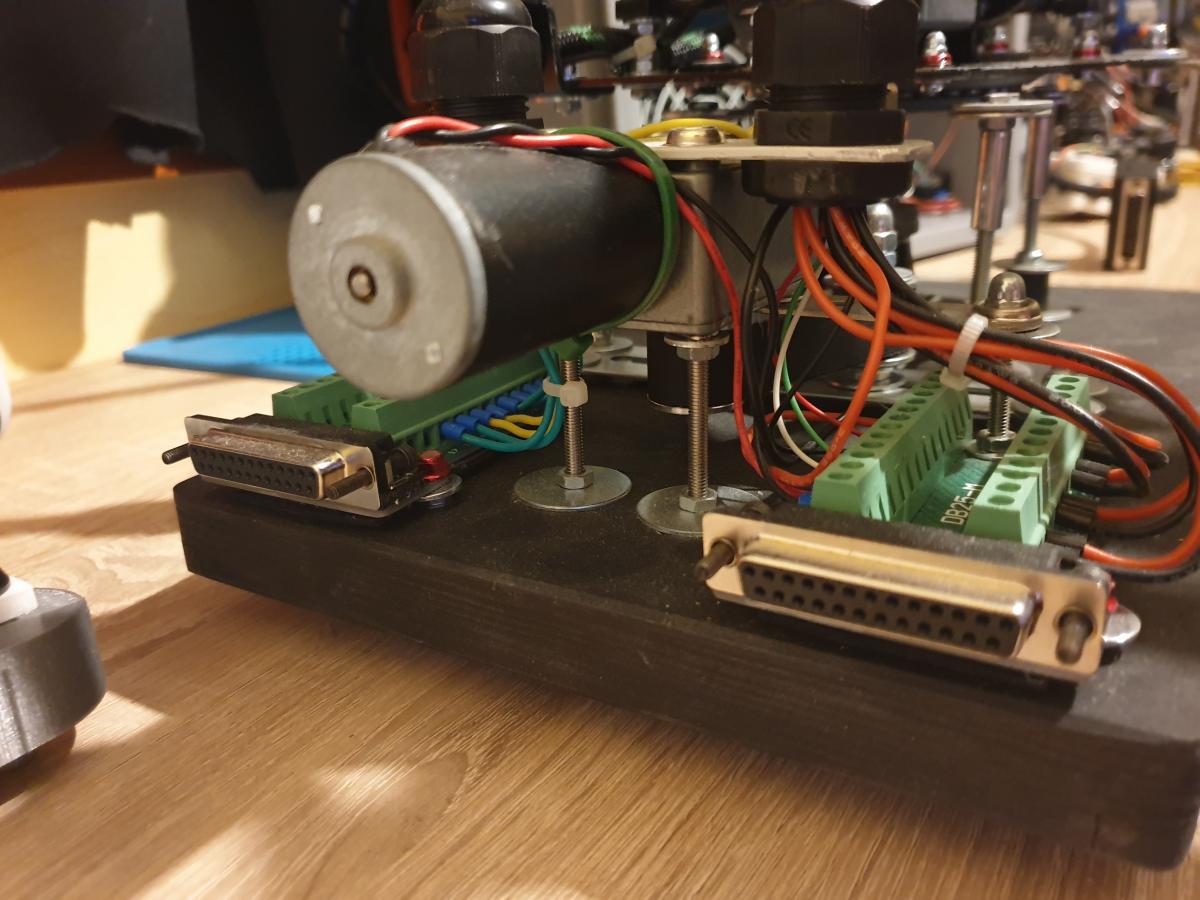
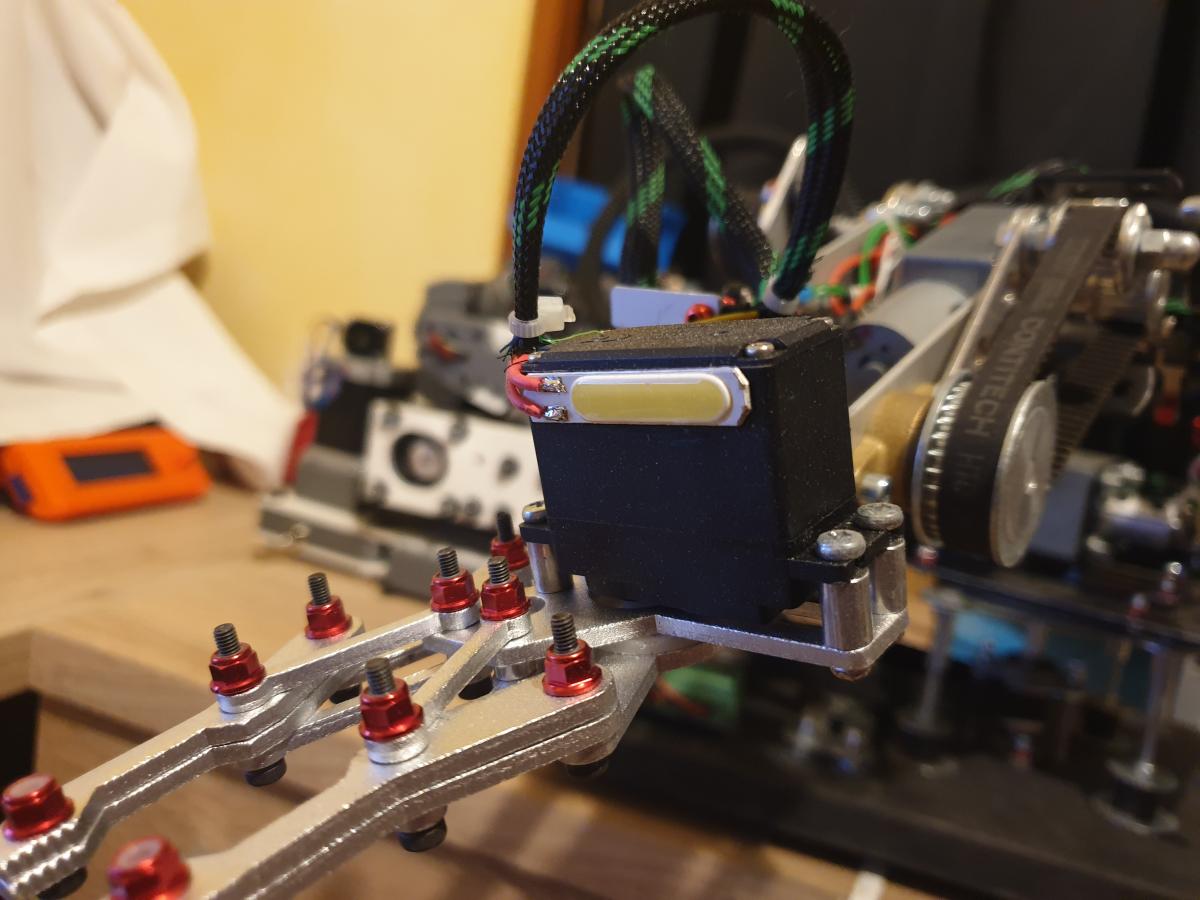
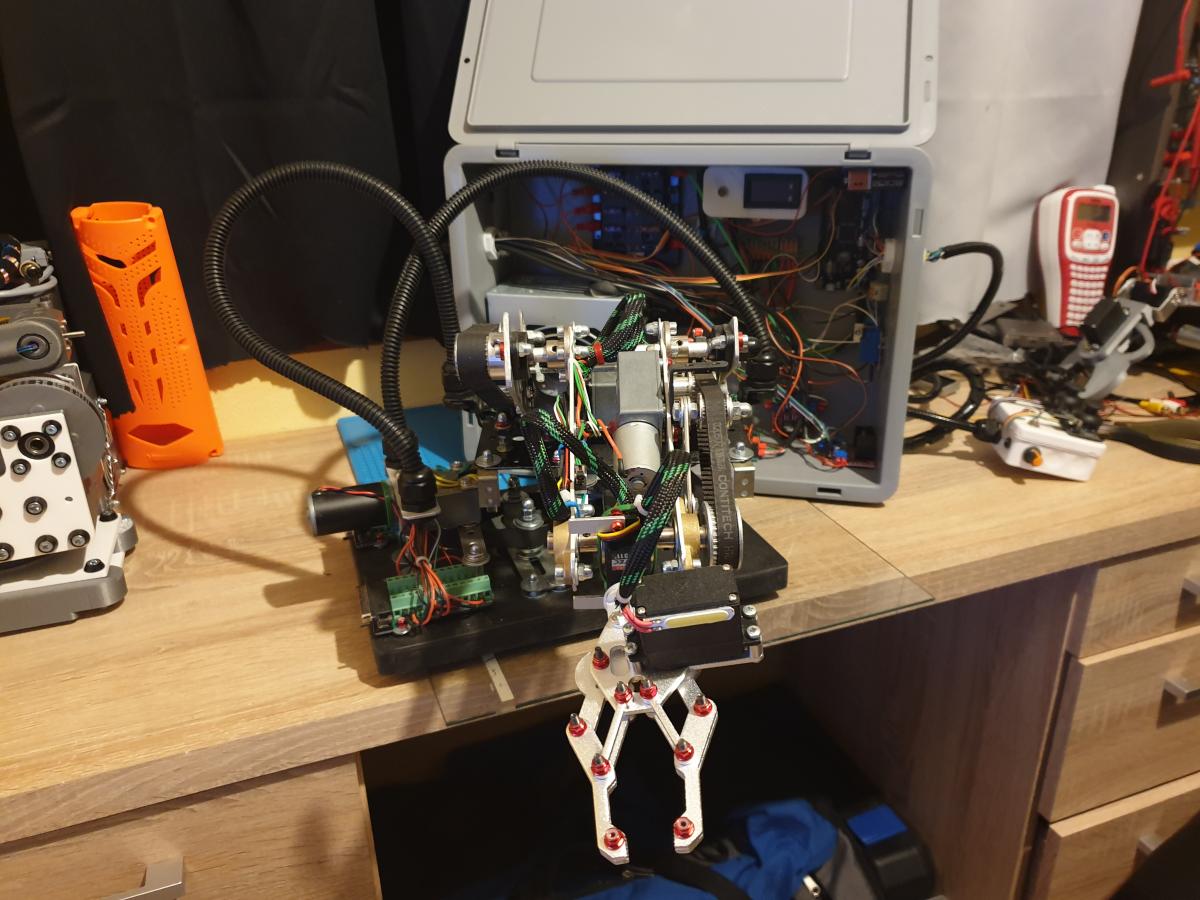
Un en axe de rotation et un autre pour serrer la pince. Ils sont alimentés par un convertisseur 12-6 18w.
Il y a aussi un petit projecteur 😁
Image(s) jointe(s)
#107471 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:30
dans
Vigibot
Image(s) jointe(s)
#107470 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:24
dans
Vigibot
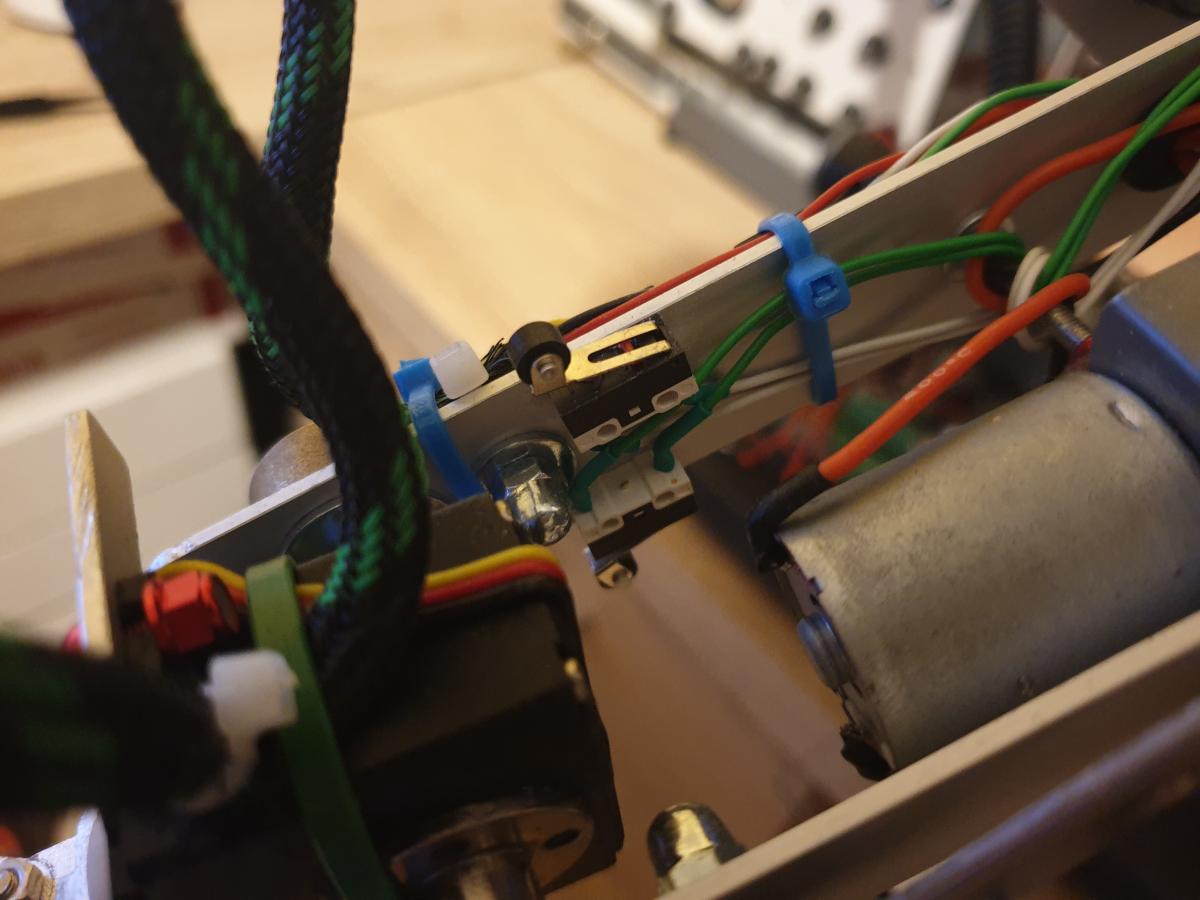
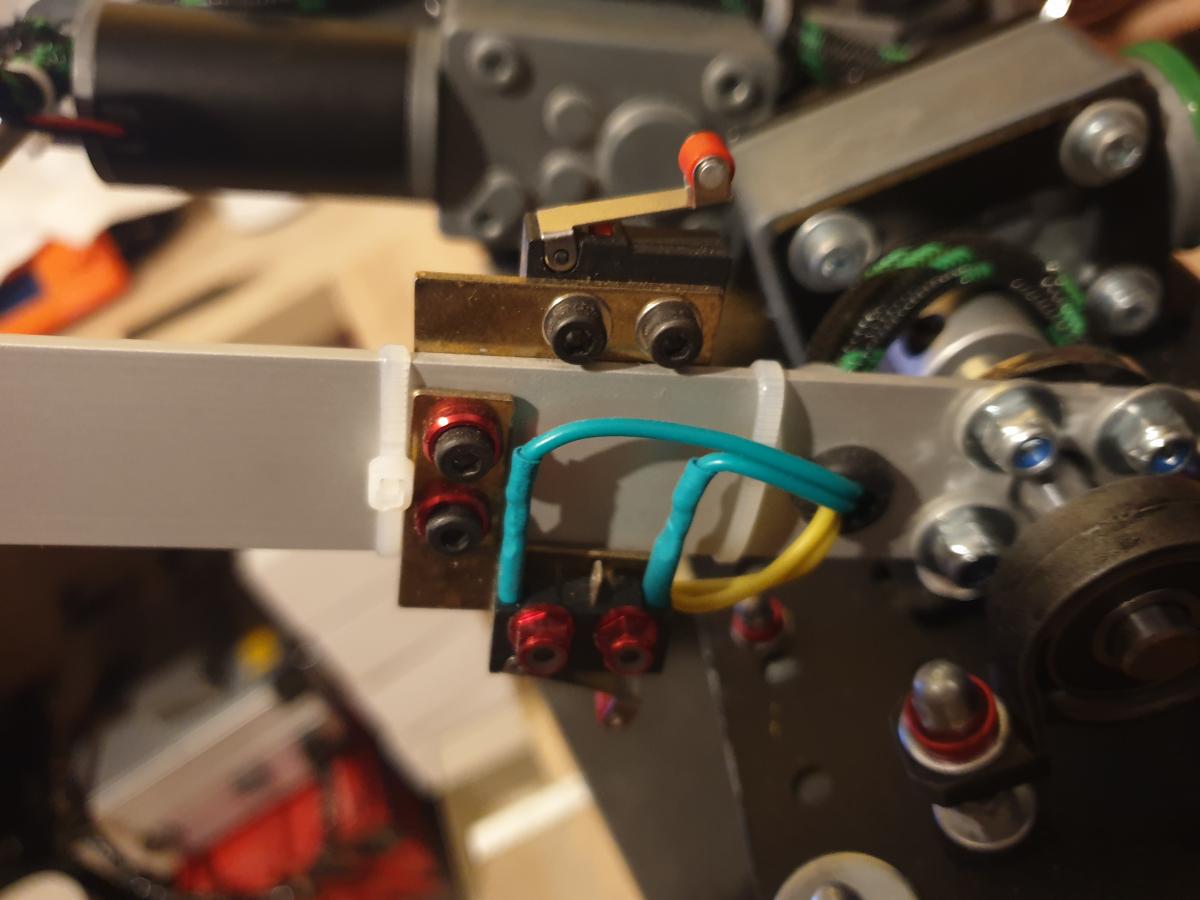
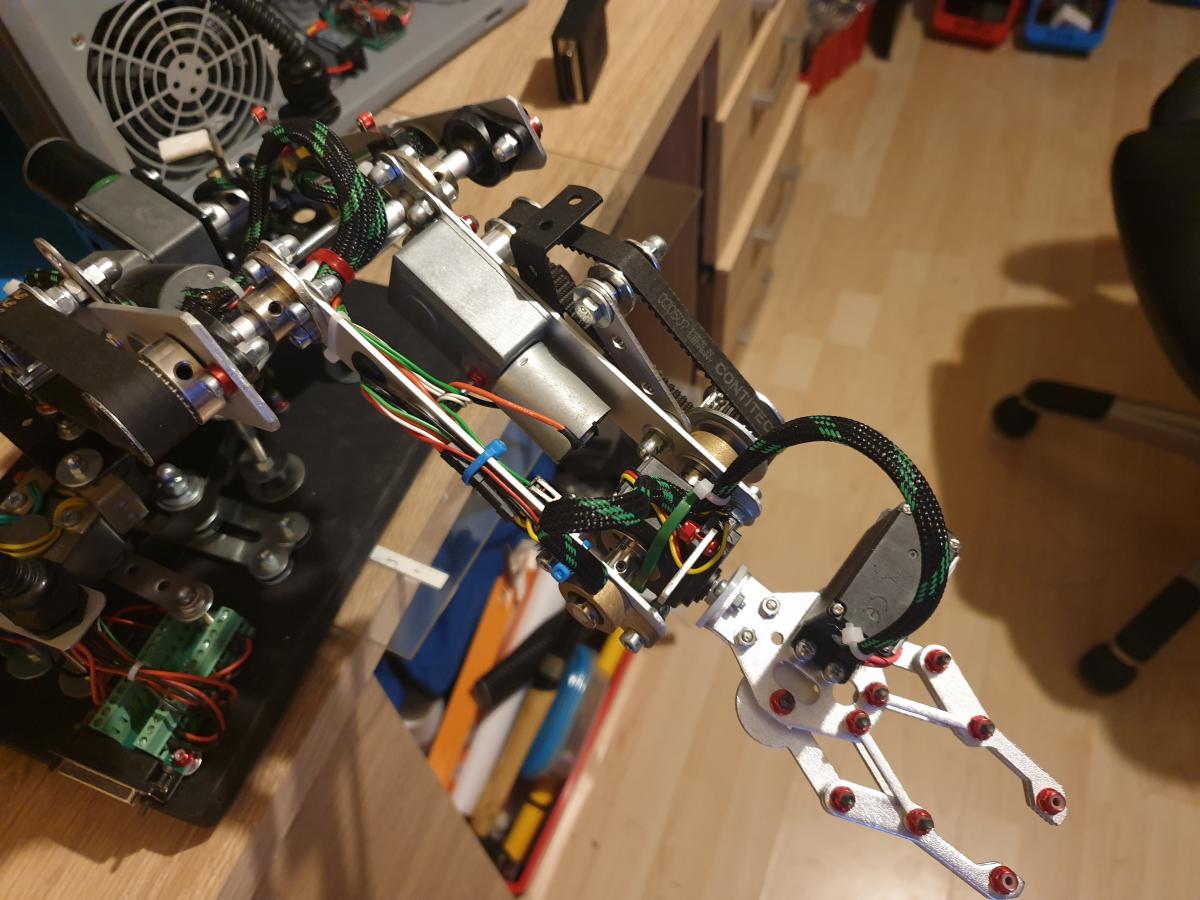
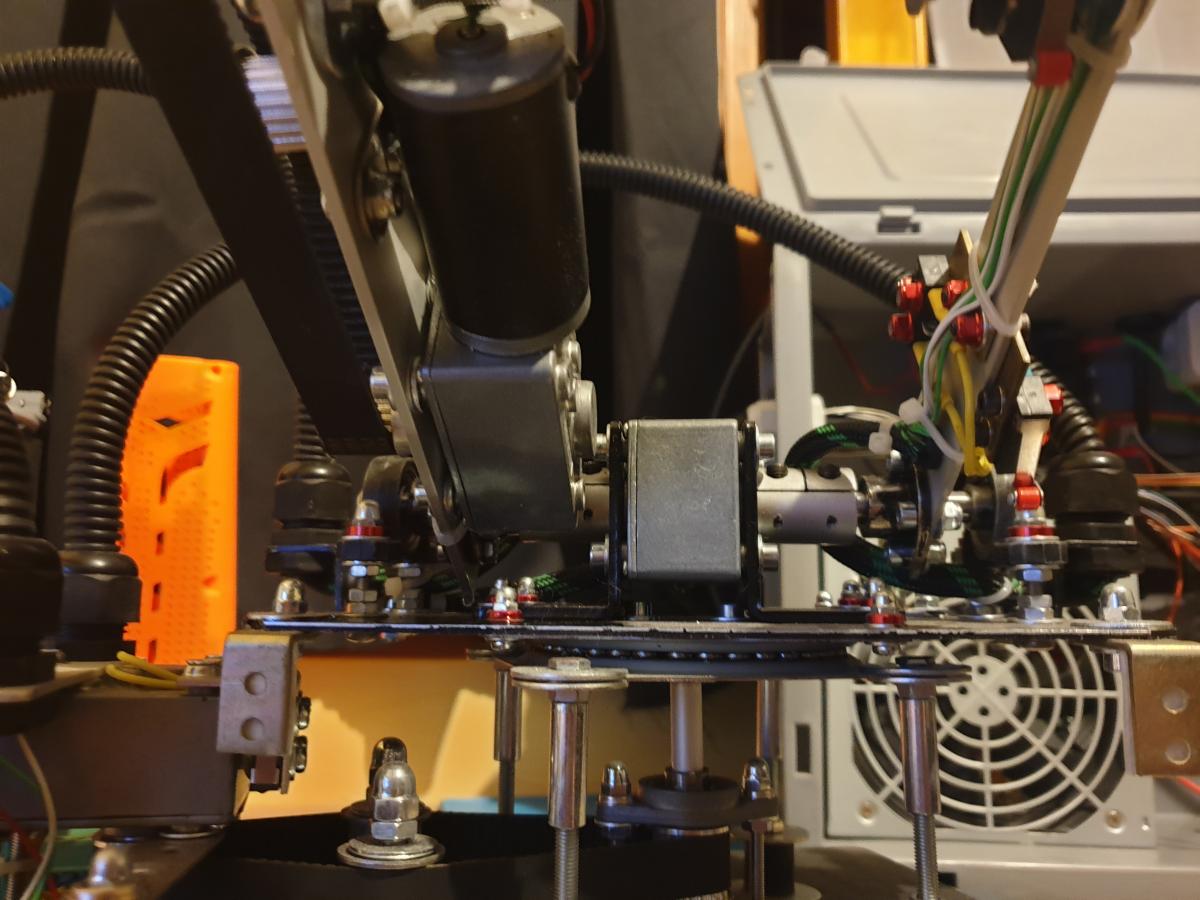
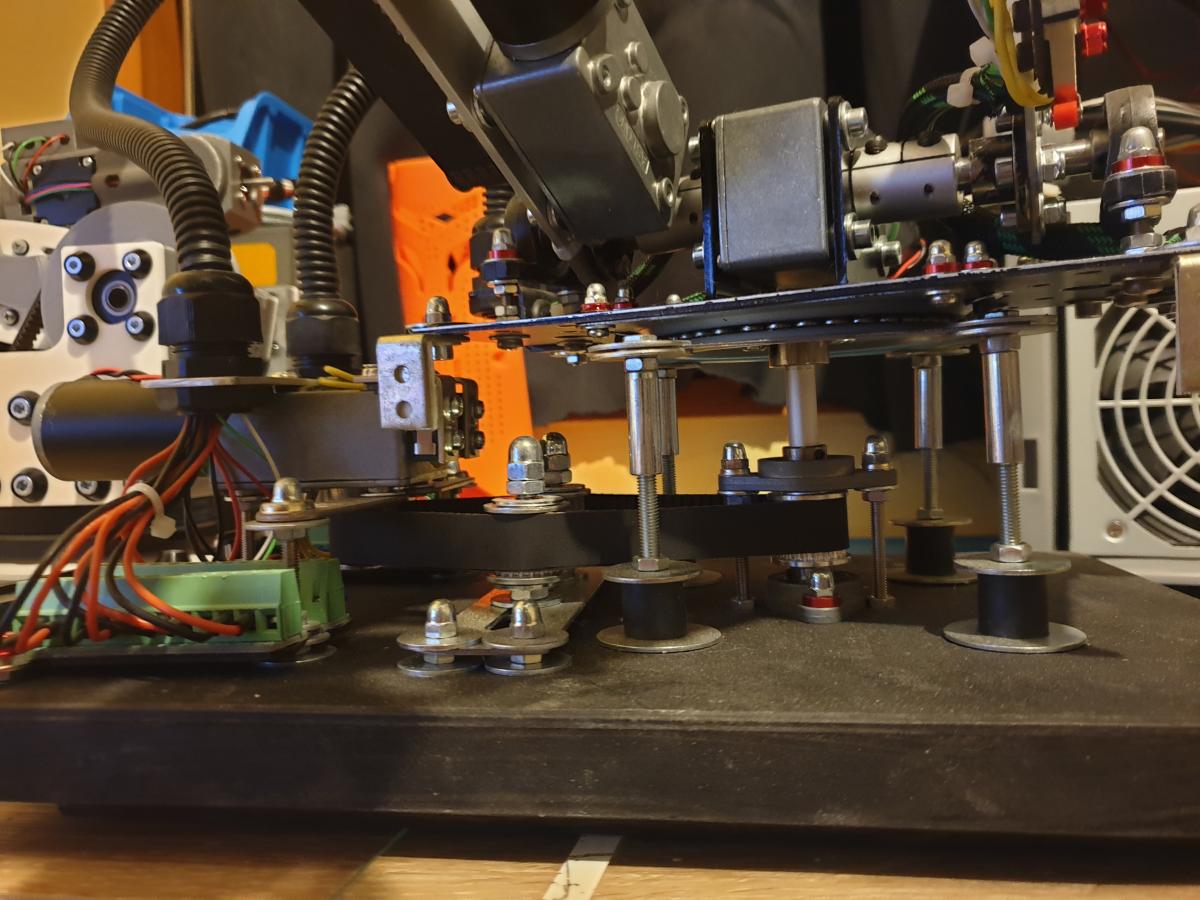
Sur la base, le bras 2 et le bras 3 il y a un système de poulie courroie avec rapport qui augmente le couple
Sur le bras 1 c'est en direct sur un plus gros moteur avec 2 arbres de sortie
Image(s) jointe(s)
#107469 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 06:21
dans
Vigibot
#107467 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 05:58
dans
Vigibot
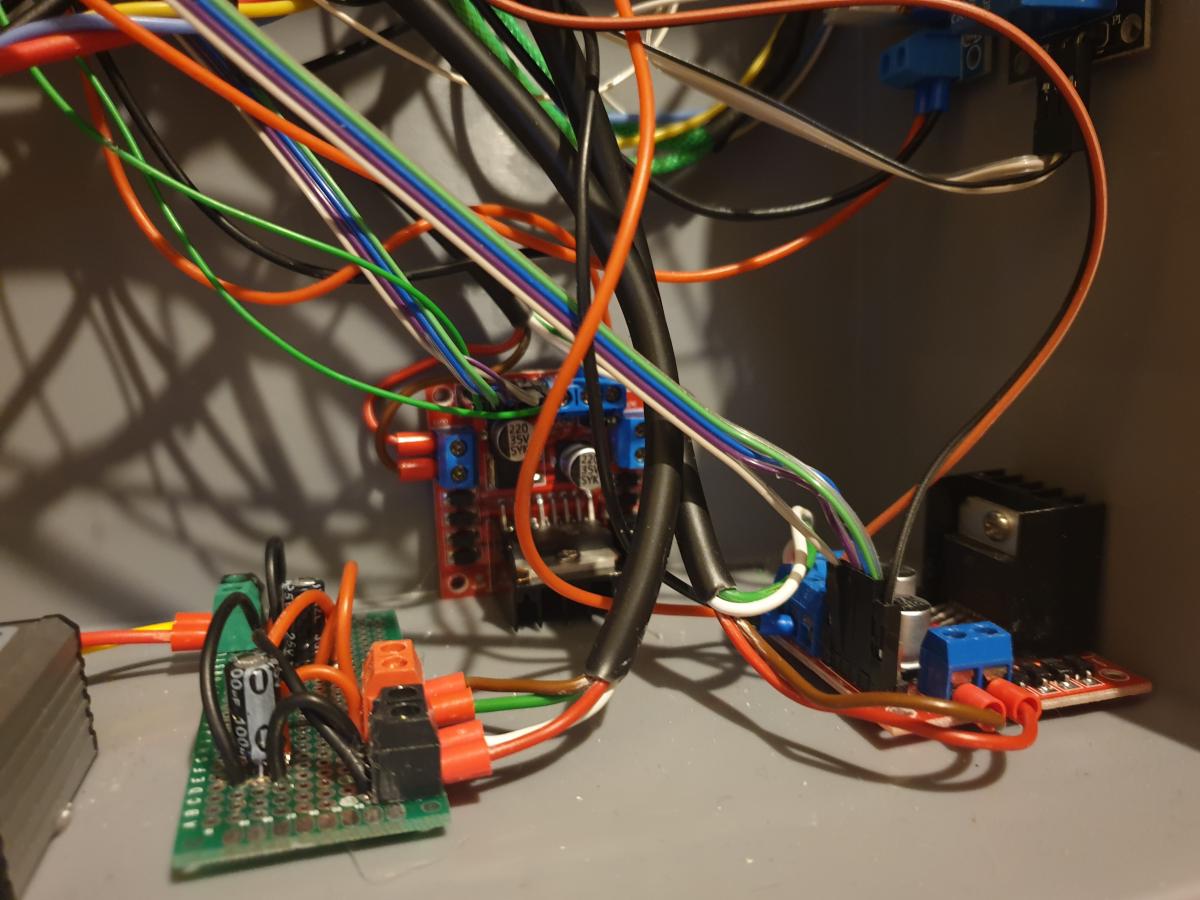
Je n'ai utilisé que le 12V
Image(s) jointe(s)

#107466 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 05:32
dans
Vigibot
#107464 Conversion d'un bras robot pour Vigibot
Posté par
sur 25 janvier 2020 - 04:32
dans
Vigibot
Image(s) jointe(s)
#107459 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 04:01
dans
Vigibot
J'ai fait un pont diviseur de tension avec des résistance de 9K et 18K pour etre au plus proche des 5V admissible sur les broches du nano quand mon accu est à 12.8V qui est la tension maximum que j'ai observée lors de la charge.
J'ai finalement choisi une tension de 12V à 100% et 10.5 à 0% cela devrait me laisser une autonomie de 2 bonnes heures avec utilisation modérée sans passer par la station de charge et faire durer mon accu un bon bout de temps
Au niveau du code j'ai juste ceci au final
const int pinVoltage = A0;
int value = 0;
int valuePi = 0;
void setup() {
pinMode(pinVoltage,INPUT);
}
void loop() {
value = analogRead(pinVoltage);
value = constrain(value, 685, 790);
valuePi = map(value, 685, 790, 0, 255);
}
#107457 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:32
dans
Vigibot
const int pinVoltage = A0;
float voltageNano = 0.0;
float voltageAccu = 0.0;
float R1 = 22000.0;
float R2 = 5600.0;
int value = 0;
int Pi = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
value = analogRead(pinVoltage);
voltageNano = (value * 5.0) / 1024;
voltageAccu = (voltageNano / (R2/(R1+R2)))+0.5;
value = constrain(value, 410, 494);
Pi = map(value, 410, 494, 0, 255);
Serial.print(value);
Serial.print(" ");
Serial.print(voltageAccu);
Serial.print(" ");
Serial.println(Pi);
delay(1000);
}
#107456 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:30
dans
Vigibot
ya un delay c'est pour voir plus clair dans le moniteur série après on le gicle.
Maintenant comment intégrer mon petit code dans ton code exemple serial arduino je suis pas sur du tout
#107447 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:46
dans
Vigibot
J'ai déjà récupéré des tensions dans un arduino avec un pont resistif et une petite transformation de valeures avec un bout de code mais je me demande au final pour vigibot il faut quoi ? Un pourcentage ? Une valeure de tension en volt directement ? Une valeure entre 0 et 1024 ?
#107445 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 02:37
dans
Vigibot
J'ai vu passer sur le discord Vigibot une possibilité d'avoir un retour de la tension de la batterie directement sur l'interphase même avec un accu 12v ...
#107444 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 02:12
dans
Vigibot
Image(s) jointe(s)

#107430 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 05:16
dans
Vigibot
Image(s) jointe(s)

#107428 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 05:08
dans
Vigibot
Le parchoc arrière en production
Image(s) jointe(s)
#107422 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 02:39
dans
Vigibot
Image(s) jointe(s)

#107421 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 02:21
dans
Vigibot
Image(s) jointe(s)

#107420 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 01:47
dans
Vigibot
Voici mon système de charge magnétique avec Voltmètre pour surveiller la tension de l'accu directement avec la camera
J'attend une ventouse que j'ai commandé pour faire la station de charge du robot
Image(s) jointe(s)
#107391 Robot mobile de suveillance via Vigibot
Posté par
sur 19 janvier 2020 - 09:56
dans
Vigibot
Salut! on est en train de faire une migration donc on a bloqué l'édition. Je te préviens dès que c'est de nouveau en place. cela ne devrait plus trop tarder.
Super je me rejouis !! A bientôt alors




