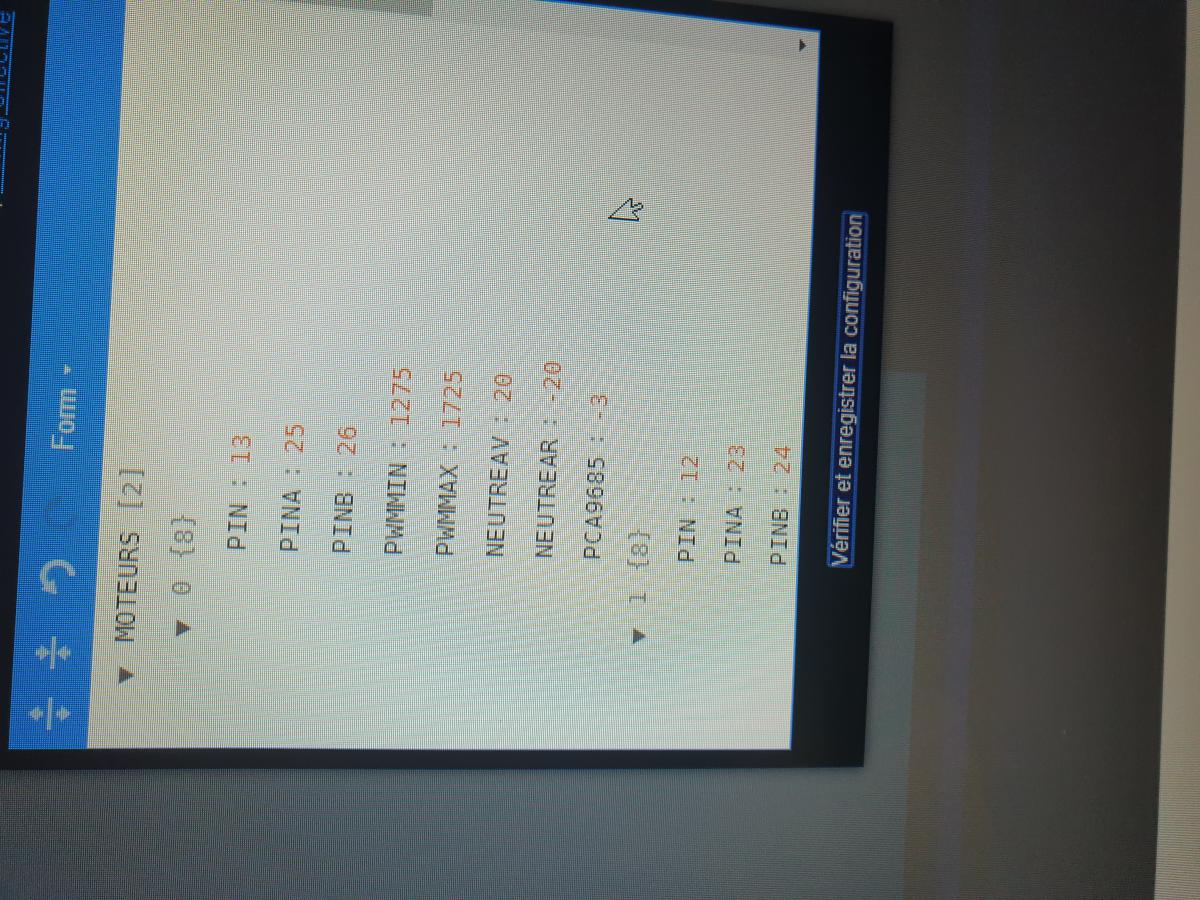
J'ai essayé de régler la config des moteurs mais quand je fait verifier et enregistrer j'ai AJAX POST error qui s'affiche ...
Comment régler la course des servos ?
Il y a 205 élément(s) pour Vinchator (recherche limitée depuis 21-juin 13)
 Posté par
sur 19 janvier 2020 - 09:27
dans
Vigibot
Posté par
sur 19 janvier 2020 - 09:27
dans
Vigibot
Posté par
sur 08 décembre 2019 - 12:41
dans
Vigibot
Content pour toi !
Mais alors, pourquoi un char ?
Posté par
sur 15 février 2020 - 09:39
dans
Vigibot
Posté par
sur 08 décembre 2019 - 03:39
dans
Vigibot
Chacun fait comme il veut ! =)
Dès que tu commences à câbler le robot, note bien sur quel pin de la raspberry pi tu branches quoi pour que je puisse t'aider pour la config sur le site web. On a pas encore la tonne de documentation mais on compense avec de l'assistance ++ =)
Posté par
sur 27 janvier 2020 - 06:13
dans
Vigibot
Posté par
sur 08 décembre 2019 - 11:24
dans
Vigibot
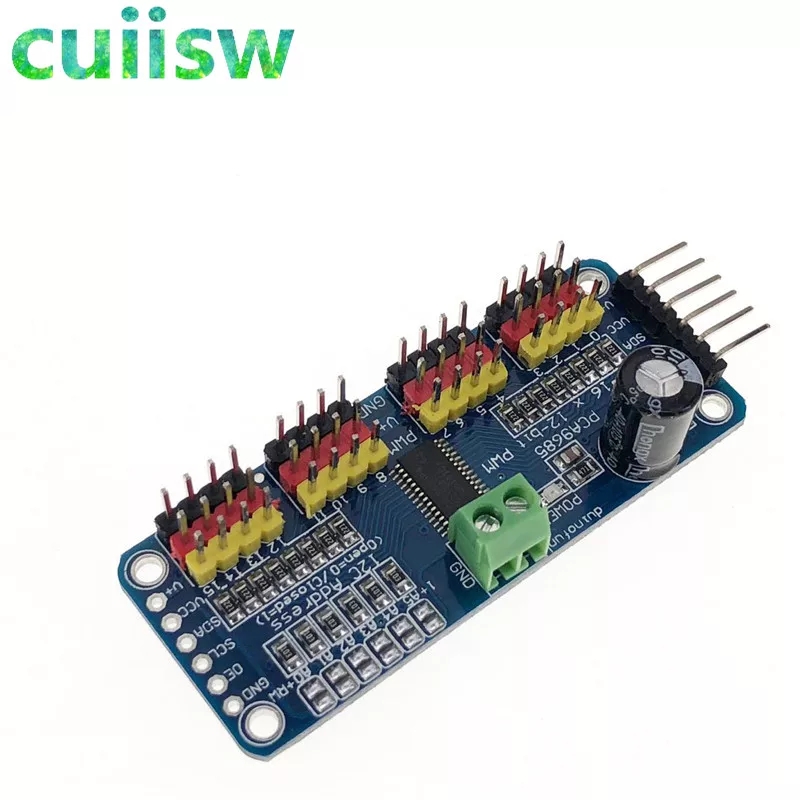
Je ne suis pas très habitué au raspberry mais vu le nombre de sorties pwm je suppose avoir besoin d'une carte de ce type ? Pour les signaux pwm des drivers de moteurs dc on peut utilisé la même carte ?Chacun fait comme il veut ! =)
Dès que tu commences à câbler le robot, note bien sur quel pin de la raspberry pi tu branches quoi pour que je puisse t'aider pour la config sur le site web. On a pas encore la tonne de documentation mais on compense avec de l'assistance ++ =)
Posté par
sur 13 janvier 2020 - 04:02
dans
Vigibot
Pour la charge vu que tu utilises du matériel adapté c'est bon =)
Par contre pour la décharge, est ce que tu as quelque chose qui protège te batterie de la décharge profonde ?
Posté par
sur 08 décembre 2019 - 11:44
dans
Vigibot
Posté par
sur 24 janvier 2020 - 03:32
dans
Vigibot
const int pinVoltage = A0;
float voltageNano = 0.0;
float voltageAccu = 0.0;
float R1 = 22000.0;
float R2 = 5600.0;
int value = 0;
int Pi = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
value = analogRead(pinVoltage);
voltageNano = (value * 5.0) / 1024;
voltageAccu = (voltageNano / (R2/(R1+R2)))+0.5;
value = constrain(value, 410, 494);
Pi = map(value, 410, 494, 0, 255);
Serial.print(value);
Serial.print(" ");
Serial.print(voltageAccu);
Serial.print(" ");
Serial.println(Pi);
delay(1000);
}
Posté par
sur 09 décembre 2019 - 06:30
dans
Vigibot
Posté par
sur 29 janvier 2020 - 08:09
dans
Vigibot
Ci-dessus le code televersé dans l'arduino
Avec l'aide de Mike j'ai intégré la fonction qui récupère une valeur sur 8 bits ( 0 à 255) proportionnel à la tension de l'accu dans le code exemple pour communiquer avec Vigibot via le Pi en liaison série. Du coté de Vigibot le barre graphe voltage à été adapté à ma plage de tension. Il y a également une moyenne qui est faite sur 100 mesures pour avoir un affichage moins oscillant dans le barre graphe
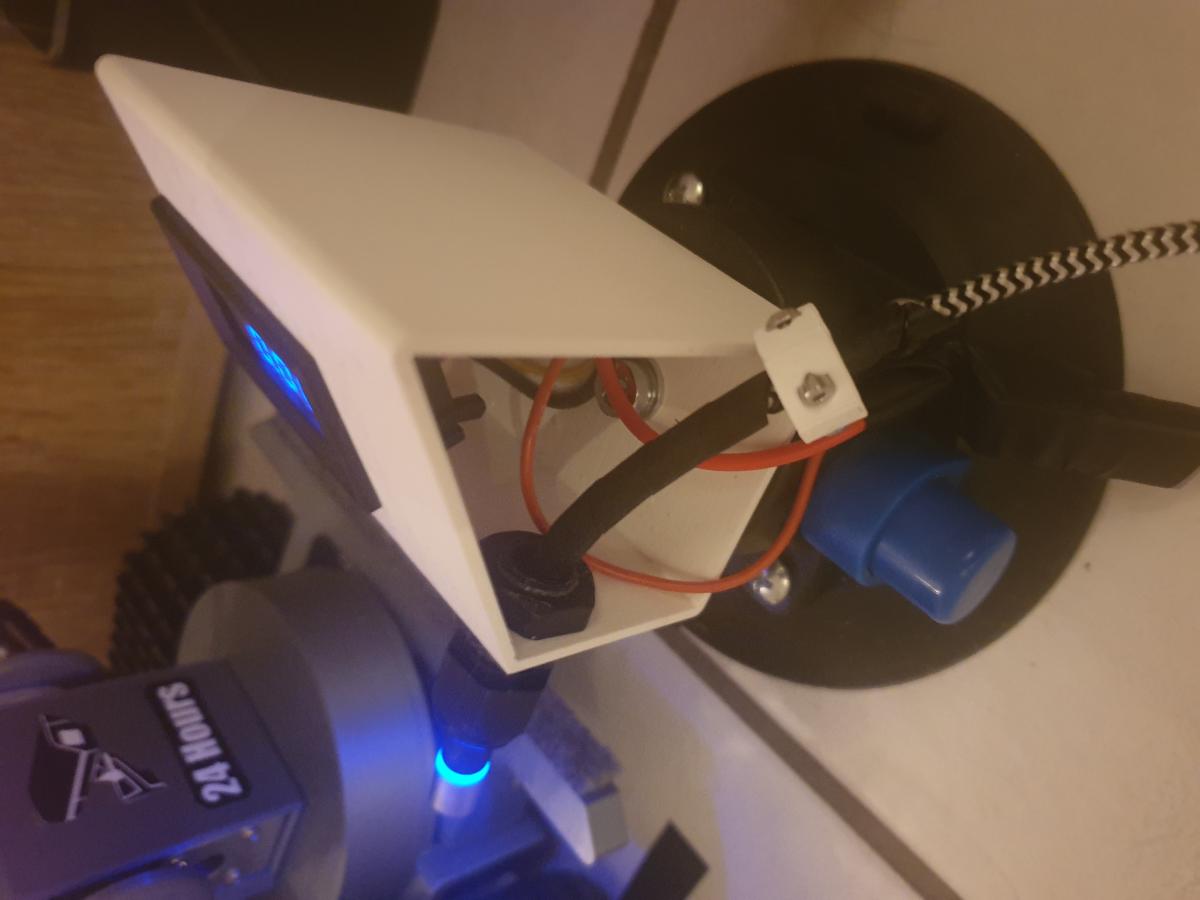
Ci dessous des photos du nano et de la case ou il sera monté. Il me manque encore un convertisseur de logique 3.3-5 pour les pins RX/TX pour finaliser et faire le test final

Posté par
sur 19 décembre 2019 - 07:05
dans
Vigibot

Posté par
sur 08 décembre 2019 - 08:48
dans
Vigibot
Y a t-il des escaliers dans ta maison ?
Posté par
sur 19 décembre 2019 - 07:15
dans
Vigibot
Posté par
sur 17 janvier 2020 - 08:18
dans
Vigibot

Posté par
sur 20 décembre 2019 - 02:47
dans
Vigibot

Posté par
sur 24 janvier 2020 - 03:30
dans
Vigibot
Posté par
sur 08 janvier 2020 - 07:12
dans
Vigibot
Joli ! =) c'est quoi ce que tu utilises comme servomoteur ?
Posté par
sur 24 janvier 2020 - 04:01
dans
Vigibot
J'ai fait un pont diviseur de tension avec des résistance de 9K et 18K pour etre au plus proche des 5V admissible sur les broches du nano quand mon accu est à 12.8V qui est la tension maximum que j'ai observée lors de la charge.
J'ai finalement choisi une tension de 12V à 100% et 10.5 à 0% cela devrait me laisser une autonomie de 2 bonnes heures avec utilisation modérée sans passer par la station de charge et faire durer mon accu un bon bout de temps
Au niveau du code j'ai juste ceci au final
const int pinVoltage = A0;
int value = 0;
int valuePi = 0;
void setup() {
pinMode(pinVoltage,INPUT);
}
void loop() {
value = analogRead(pinVoltage);
value = constrain(value, 685, 790);
valuePi = map(value, 685, 790, 0, 255);
}
Posté par
sur 09 janvier 2020 - 01:34
dans
Vigibot
Joli ! =) c'est quoi ce que tu utilises comme servomoteur ?
Posté par
sur 29 janvier 2020 - 05:26
dans
Vigibot
/*
* Vigibot Pi to Arduino Uart default remote configuration example by Mike118
* Exemple pour récupérer la tension de la batterie réalisé par vinchator
*/
// Meta Type :
typedef struct {
union {
struct {
uint16_t x;
uint16_t y;
};
uint16_t coordonnees[2];
uint8_t bytes[4];
};
} Point;
typedef struct {
union {
struct {
int8_t x;
int8_t y;
int8_t z;
};
uint8_t bytes[3];
};
} Vitesses;
// CONFIG
#define PISERIAL Serial
#define NBPOSITIONS 2
#define FAILSAFE 250 // ms
// TTS
#define TTSBUFFERSIZE 255
uint8_t ttsBuffer[TTSBUFFERSIZE];
uint8_t ttsCurseur = 0;
// TX
#define TXFRAMESIZE (NBPOSITIONS * 4 + 18)
typedef struct {
union {
struct {
uint8_t sync[4]; // 4
Point positions[NBPOSITIONS]; // NBPOSITIONS * 4
uint16_t val16[2]; // 2 * 2
uint8_t choixCameras; // 1
Vitesses vitesses; // 3
uint8_t interrupteurs; // 1
uint8_t val8[5]; // 5
};
uint8_t bytes[TXFRAMESIZE];
};
} TrameTx;
// RX
#define RXFRAMESIZE (NBPOSITIONS * 4 + 9)
typedef struct {
union {
struct { // Sizes
uint8_t sync[4]; // 4
Point positions[NBPOSITIONS]; // NBPOSITIONS * 4
uint8_t choixCameras; // 1
Vitesses vitesses; // 3
uint8_t interrupteurs; // 1
};
uint8_t bytes[RXFRAMESIZE];
};
} TrameRx;
TrameTx trameTx;
TrameRx trameRx;
uint32_t lastTrameTimestamp = millis();
const int nEchantillons = 100; //nombre d'échantillons
int moyenne = 0; //moyenne des échantillons
int total = 0; //somme des échantillons
int indice = 0; //indice de l'échantillon courant
int echantillon[nEchantillons]; //tableau de stockage des échantillons
void setup() {
PISERIAL.begin(115200);
pinMode(A0, INPUT);
for (int i =0; i< nEchantillons; i++) //remplissage du tableau avec des 0
{echantillon[i] = 0;}
}
void loop() {
total = total - echantillon[indice]; // soustraction de l'échantillon précédent
echantillon[indice] = constrain(map(analogRead(A0), 680, 820, 0, 255), 0, 255); //lecture de A0
total = total + echantillon[indice]; //ajout du dernier échantillon
indice++; // incrémentation de l'indice
if (indice >= nEchantillons) {
indice = 0; // retour au début si on est à la fin du tableau
}
moyenne = total / nEchantillons;
if(readPiSerial()) {
// each time we receive a full trame run repeatedly:
// use values inside trameRx to tell your robot how to move ...
// trameRx.vitesses.x , trameRx.vitesses.y, trameRx.vitesses.z
// trameRx.positions[i].x trameRx.positions[i].y etc....
writePiSerial();
lastTrameTimestamp = millis();
}
if( millis() - lastTrameTimestamp > FAILSAFE ) {
// Stop the robot in case the robot lost connection with the Pi
} else {
// put your main code here, to run repeatedly:
// avoid abstacle, run speed ...
}
}
bool readPiSerial() {
uint8_t current;
static uint8_t lastType = 0;
static uint8_t n = 0;
static uint8_t frame[RXFRAMESIZE];
while(PISERIAL.available()) {
current = PISERIAL.read();
switch(n) {
case 0:
if(current == '$')
n = 1;
break;
case 1:
if(current != 'T' && lastType == 'T')
writeTtsBuffer('\0');
if(current == 'S' || current == 'T') {
lastType = current;
n = 2;
} else
n = 0;
break;
default:
frame[n++] = current;
if(n == RXFRAMESIZE) {
if(lastType == 'T') {
for(uint8_t i = 4; i < RXFRAMESIZE; i++) // Do not send the 4 sync data in the tts buffer
writeTtsBuffer(frame[i]);
} else if(lastType == 'S') {
for(uint8_t p = 0; p < RXFRAMESIZE; p++)
trameRx.bytes[p] = frame[p];
}
n = 0;
return true;
}
}
}
return false;
}
void writePiSerial() {
// Header, do not modify
trameTx.sync[0] = '$';
trameTx.sync[1] = 'R';
trameTx.sync[2] = ' ';
trameTx.sync[3] = ' ';
// modify the feedback according your need. By default we copy the trameRx content ...
for(uint8_t i = 0; i < NBPOSITIONS; i++) {
trameTx.positions[i].x = trameRx.positions[i].x;
trameTx.positions[i].y = trameRx.positions[i].y;
}
trameTx.val16[0] = 0; // Voltage
trameTx.val16[1] = 0; // Percent
trameTx.choixCameras = trameRx.choixCameras;
trameTx.vitesses.x = trameRx.vitesses.x;
trameTx.vitesses.y = trameRx.vitesses.y;
trameTx.vitesses.z = trameRx.vitesses.z;
trameTx.interrupteurs = trameRx.interrupteurs;
trameTx.val8[0] = 0; // CPU load
trameTx.val8[1] = 0; // Soc temp
trameTx.val8[2] = 0; // Link
trameTx.val8[3] = 0; // RSSI
trameTx.val8[4] = getVoltage255();
for( uint8_t i = 0; i < TXFRAMESIZE; i++)
PISERIAL.write(trameTx.bytes[i]);
}
void displayTtsBuffer (uint8_t * ttsBuffer, uint8_t bufferSize) {
// you can modify this function to display text on a screen depending on your hardware...
for( uint8_t i = 0; i < bufferSize; i++)
Serial.write(ttsBuffer[i]);
Serial.println("");
}
void writeTtsBuffer( uint8_t ttsChar) {
static uint8_t ttsCurseur = 0;
if( ttsCurseur < TTSBUFFERSIZE && ttsChar != '\0') {
ttsBuffer[ttsCurseur] = ttsChar;
ttsCurseur ++;
}
if( ttsCurseur == TTSBUFFERSIZE || ttsChar == '\0') {
displayTtsBuffer (ttsBuffer, ttsCurseur);
ttsCurseur = 0;
}
}
uint8_t getVoltage255 () {
return moyenne;
}
Posté par
sur 12 janvier 2020 - 10:43
dans
Vigibot

Posté par
sur 15 février 2020 - 06:27
dans
Vigibot
Posté par
sur 13 janvier 2020 - 03:20
dans
Vigibot



Posté par
sur 17 février 2020 - 10:51
dans
Vigibot