Posté par
Posté par
Bonjour,
Merci Sandro, je n'ai pas tout lu (2 heure du matin), mais il me semble que je vais mieux comprendre. Je me suis levé pour vous écrire que je me suis lamentablement planté avec le simple inverseur.
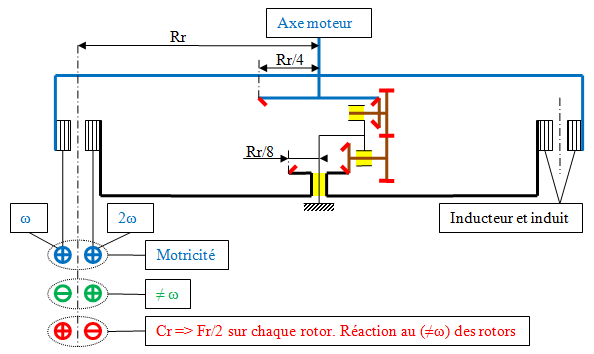
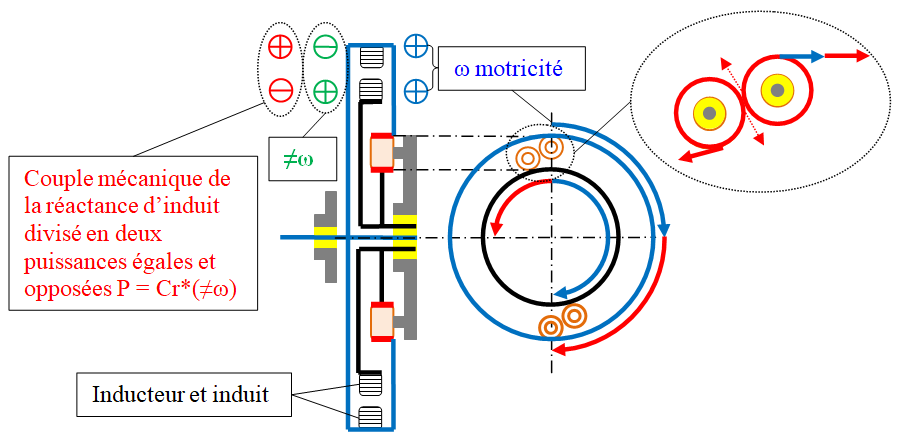
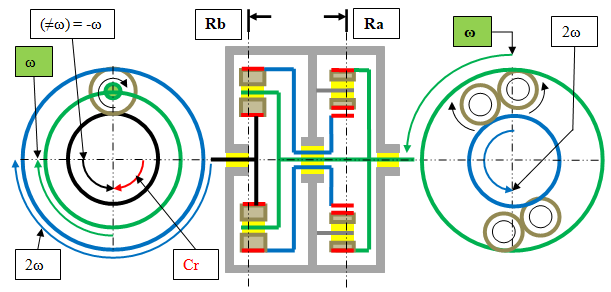
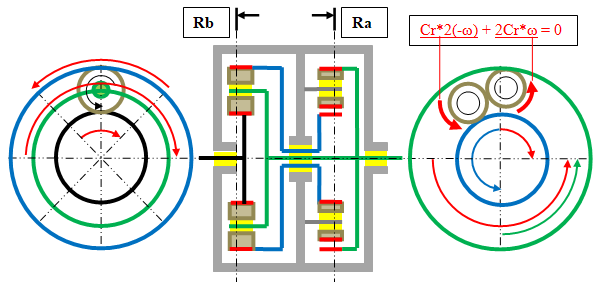
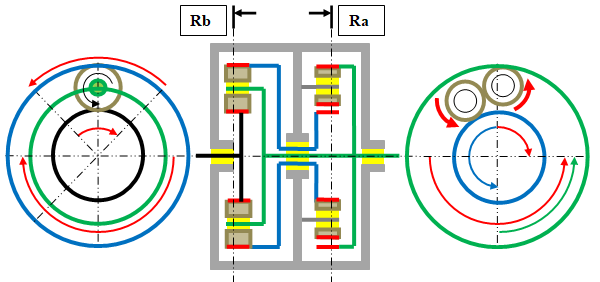
Si j'ai une réaction en deux forces égales et opposées qui s'appliquent sur des engrenages dont les rotations sont elles aussi opposées. Alors ces forces s'additionnent pour donner un résultat mathématique positif. Et je n'ai rien équilibré du tout.
Bonne nuit, A+