Posté par
Posté par
T'inquiètes je la travaille !2)La limite c'est ton imagination

Roh susceptible ! ^^3) Mon gribouillage ??! bon ben je ne gribouillerais plus ! x)
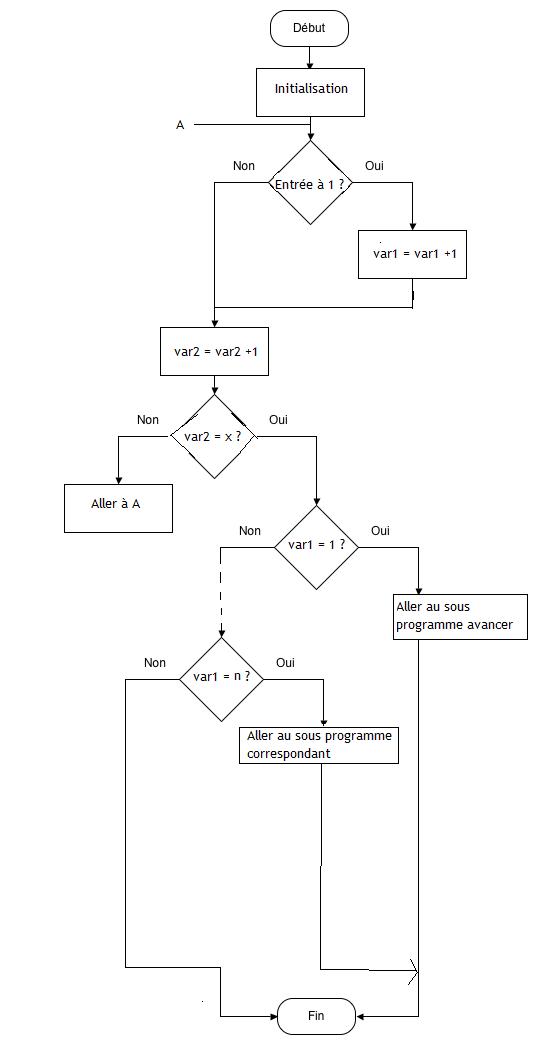
Merci tu m'as redonné de l'espoir xD Faut que j'y réfléchisse mais j'ai peut être une idée ^^par rapport au bit "start" en fait je décomposait l'écoute du pic esclave en deux mode :
le premier : attente de syncro par le pic maitre avec le premier 1
une fois la syncro effectuée on passe dans le second mode ui permet d'écouter le code en prenant une mesure toute les 1 ou 2 µS tout dépend du temps qu'on définis pour "l'état d'un Bit envoyé par le maitre "
C'est sûrement dû à la taille de ta pièce jointe (la taille maxi c'est 64Mo).justement je voulais l'envoyer par pièce jointe mais le site ne me l'a pas autorisé ... je vais voir pour changer le format ou autre...