salut
en mode bricolo/ servo a rotation continu ou petit moteur de recup je te propose :
Il y a 45 élément(s) pour Vaelan (recherche limitée depuis 20-juillet 14)
 Posté par
sur 22 juillet 2016 - 11:19
dans
Autres projets inclassables
Posté par
sur 22 juillet 2016 - 11:19
dans
Autres projets inclassables
salut
en mode bricolo/ servo a rotation continu ou petit moteur de recup je te propose :
Posté par
sur 24 juillet 2015 - 11:15
dans
Aide et question concernant le cocotix original

Posté par
sur 13 août 2016 - 08:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je te souhaite bonne chance, bien que vu les capacité de ton robot tu n'en ai peu être pas besoin 
Posté par
sur 13 août 2016 - 07:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Désole un peu en retard pour l explication
Si je veux bouger le centre du robot dans de DX=1 suivant x je vais bien avoir DiffX patte droite (avant ou arrière ) = 9 = DiffX0 -DX
Et pour les pattes gauche DiffX=11 = DiffX0 + DX ...
En faite ma cinématique ne marche pas comme ça . Ce qui définît l'empattement c'est les DiffX,Y ou Z (Différentiel) a partir des Offset et position des pieds (Référentiel) .
Alors oui y a bien un empattement définit par défaut , mais il faut bien une position de départ 
Le but étant de ne contrôler que le centre du robot, chaque commande peut être considéré un vecteur partant de Z=0 X=0 Y=0
un latéral de +1 c est un vecteur d'origine (Z=0 X=0 Y=0) à ( Z=0 X=1 Y=0)
un latéral de -1 c est un vecteur d'origine (Z=0 X=0 Y=0) à (Z=0 X=-1 Y=0)
donc on aura toujours "Offset + commande"
exemple pour un latéral de -1:
Offset translaté avant droite = Offset physique + vecteur (( 0 , 0 , 0) => ( 0 , -1 , 0))
Offset translaté avant gauche = -Offset + vecteur (( 0 , 0 , 0) => ( 0 , -1 , 0))
On sait que le vecteur est définit par la droite de l axe x du plan (x,y) passant par le centre du robot on peut donc écrire:
Offset translaté arrière gauche = -Offset + (-1)
Offset translaté arrière droite = Offset +(-1)
Je vais pas dire "on fait la même chose pour la marche" parce qu il faut quelque chose d'un peu plus complet mais on garde le même principe, et tout nos référentiel (Offset et Pied) sont calculé.
Le différentiel entre A et B (nos référentiel) permet de calculer l'empattement dynamiquement
Et enfin les trois différentiel permettent de calculé tout les angles
Avec ce début d IK j'ai pas d'exemple qui me viens a l esprit mais sur mon robot j'ai prévu en plus le roulis, tangage, et lacet (avec des méthode de marche bien entendu et d'autre chose .... ) je compte lui monter, pour ceux qui connaissent, un "Flymentor" c' est un gyro 3 axes avec accéléromètre et capteur de mouvement au sol (recupéré sur un de mes hélico) il va gérer le lacet et le tangage pour un mise a niveau du thorax.Grace à se système de différentiel quelque soit la correction d assiette du gyro qui sera appliqué, je pourrais toujours utiliser mon latéral ou le faire marcher sans que les différents mouvement soit en conflit les uns avec les autres (dans les limite physique du robot).
Posté par
sur 14 août 2016 - 08:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Offset translaté arrière gauche = -Offset + (-1)
Offset translaté arrière droite = Offset +(-1)
Je suppose que c est ça que tu comprends pas?
en faite ca correspond a :
Offset translaté arrière gauche = -Offset + (lateral)
Offset translaté arrière droite = Offset +(lateral)
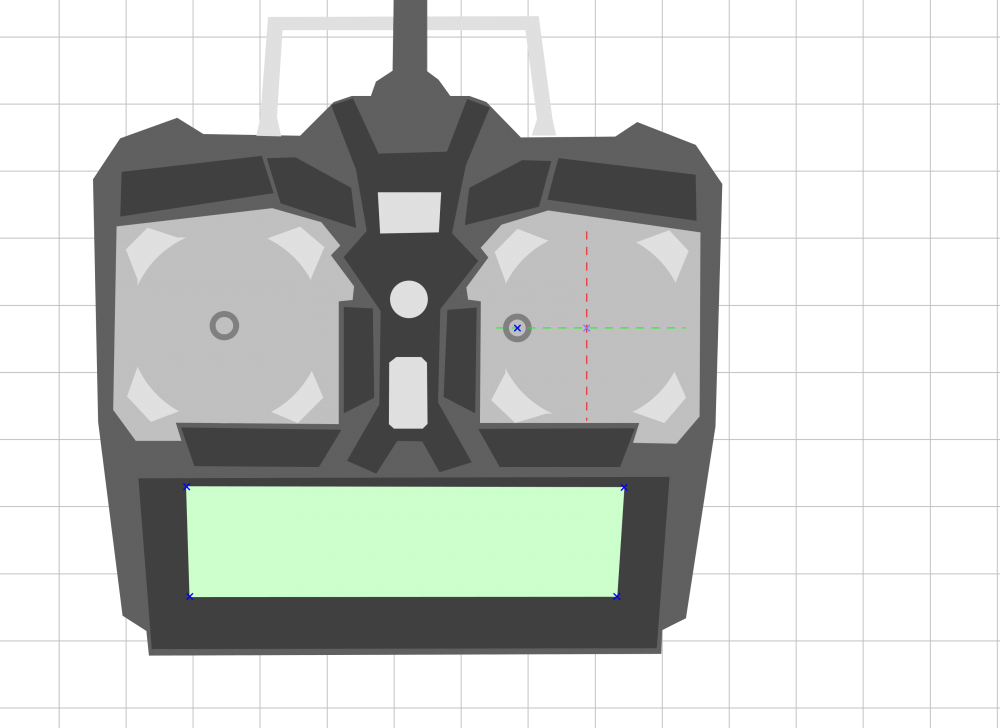
Au final la radio (ou autre moyen de controle) ne dois controler que le centre du robot.
sur une radio les manches symbolise le centre du robot.
continuons avec l'exemple de commande latéral:
coordonnée 0,0,0
coordonnée 0,5,0
coordonnée 0,-5,0
Posté par
sur 17 août 2016 - 10:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
const float largeur = 8.6;
const float longueur = 11.1;
Tu dois déjà commencer par changer ça par:
const float largeur = 11.1; const float longueur = 8.6;
#define avant 1
#define arriere -1
#define droite -1
#define gauche 1
La tu dois bien faire attention que tes servo soit bien monté comme sur mon schéma sinon tu devras adapter
Considère ton robot comme étant un plan Orthonormés dont son centre est le repère (0,0,0) , ce qui veut dire que si avant 1 et arriere -1 alors droite 1 et gauche -1
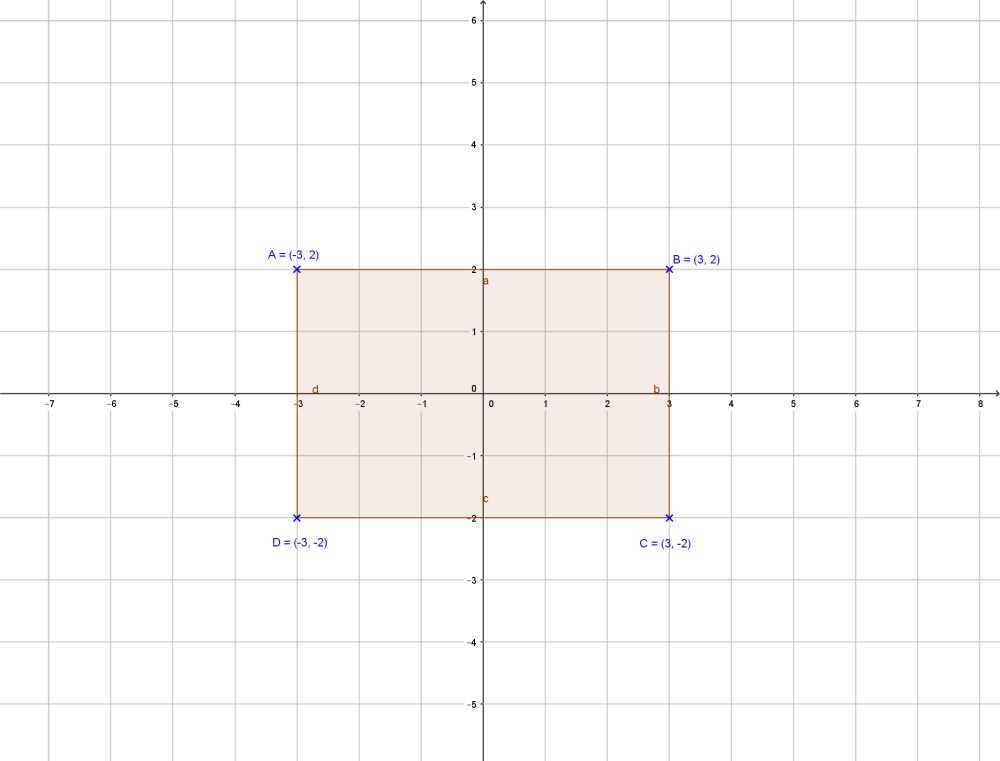
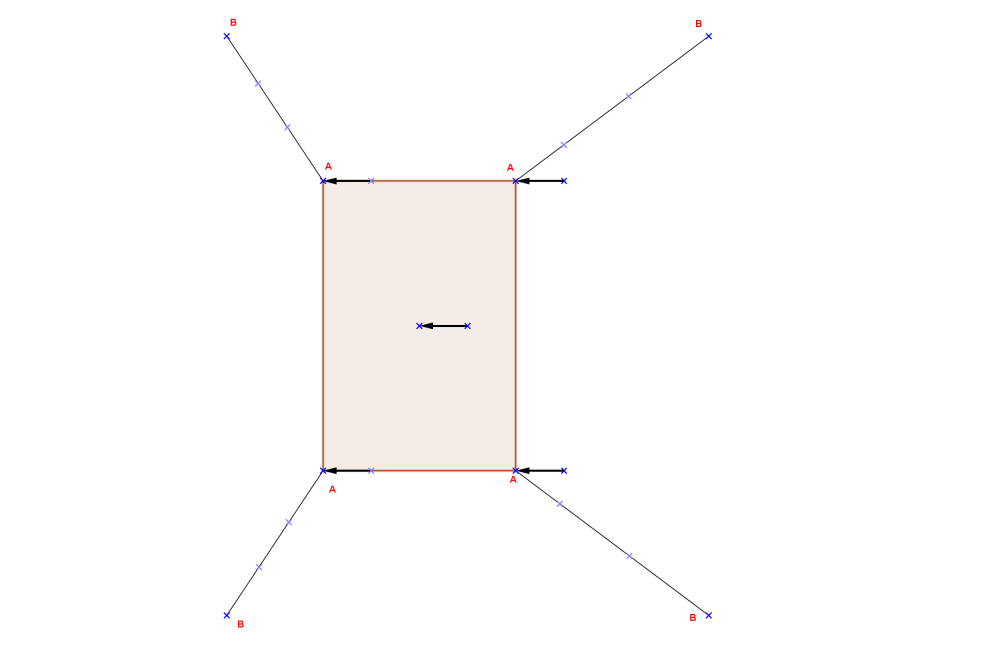
La tu vois que j ai des Offset avec des valeurs absolu identique = (3,2)
soit B (3*droite,2*avant) / (3*1,2*1) = (3,2)
A (3*gauche,2*avant) / (3*(-1),2*1) = (-3,2)
D (3*gauche,2*arriere) / (3*(-1),2*(-1)) = (-3,-2)
C (3*droite,2*arriere) / (3*1,2*(-1)) = (3,-2)
Et il sont tous à leur place. Il s'agit de placement d'Offset et pas d inversion d'angle(je vais vérifier le prog que je t'ai fais, des fois que je me soit trompé)
Posté par
sur 19 août 2016 - 01:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
intervertis les servos:
Beta avant droite avec Beta arriere droite
et
Beta avant gauche avec Beta arriere gauche
soit ils sont pas branchés sur la bonne Pin soit il y a une erreur sur la prog de distribution
au niveau des batteries Lipo elles sont de 3,7 volt par élément. j'alimente mes servo avec une 2S 1950mAH soit 7,4volt .Temp de recharge de 30 a 45 MN mais bon j'hérite du matériel de modélisme que je possédais déjà et ça demande a être manié avec prudence.
Sinon en NiMh 1,3 volt par élément il me semble moins dangereux a manipuler mais plus contraignant a l'entretien parce qu elle garde une mémoire de charge du coup il faut toujours les décharger complètement avant de les recharger
Posté par
sur 18 août 2016 - 07:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Au vues de ta vidéo il semble qu il y ai un problème avec le "longi".
"alti" et "lateral" à l'air OK .
Avec Parkinson c'est difficile de voir quel mouvement est inversé.Le code de l'IK tu l'as modifié ou il est comme l'original?
Posté par
sur 12 août 2016 - 06:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
En faite tu confonds les référentiel et les différentiel les commandes n'agissent pas directement sur DiffX mais plutot sur OffsetX (pas encore de commande sur les pieds mais Alex va les rajouter j en suis sur ) . la j ai pas le temp , je te fais un schéma ce soir
Posté par
sur 14 août 2016 - 09:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
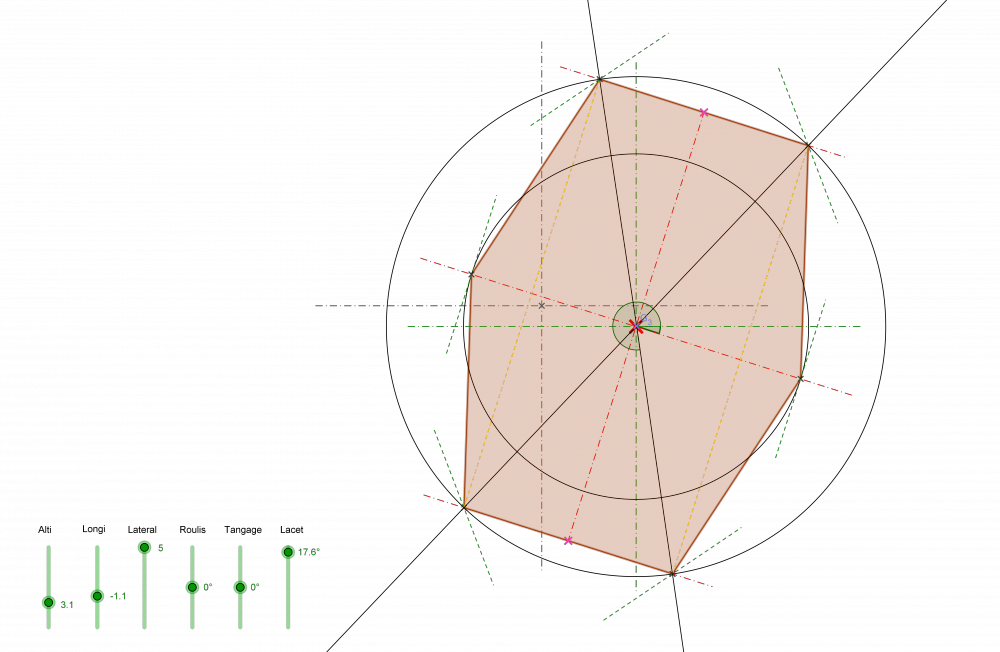
On va continuer et développer ma logique d'IK plutot sur mon post parce que ca devient un peu trop envahissant pour AlexBotMaker et je développerais un peu plus sur la marche et un point important , dont j ai fais allusion au début de mon explication, à savoir son centre de gravité.
Ce robot restera en équilibre à la condition que la projection de son centre de gravité soit en permanence dans le polygone de sustentation. Ce polygone est délimité par tous les points de contacts au sol.
Je reste dispo si tu a des problème avec ton robot Alex
Posté par
sur 11 août 2016 - 09:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Voir mon petit tutoriel ici Si tu as des questions hésites pas !
Super le tuto je connaissais pas . Tu viens de me réconcilier avec arduino et du coup on peux optimiser le code que j ai fournis plus haut
Concernant la "règle" qui dis qu'on ne soustrait jamais une commande, c'est juste le fameux théorème de vaelan qui s applique à sa cinématique inversé qui dis : Si -(commande) alors démonte ton robot et remonte le comme il faut ) Blague a part , les commandes définissent un vecteur d'origine 0,0,0 (le centre du robot), sur (x,y ou z) , de direction - ou + et de longueur la valeur de la commande.
Donc si tu as un latéral de -1 c est un vecteur sur x vers la gauche de longueur 1 maintenant si tu fais -vecteur tu inverse le vecteur du coup si tu dis a un offset de droite +vecteur et a un offset de gauche -vecteur tu vas casser quelque chose ) J ai voulu faire une explication simple mais je me rends compte qu avec un langage plus matheux ça aurais était peut-être un peu plus clair, désole.
alors t en ai ou AlexBot? ca avance?
Posté par
sur 10 août 2016 - 10:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je suis très intéressée par la méthode de Mike118 y a juste une chose très importante! une commande ne se soustrait JAMAIS.
DiffX ( patte avant droite ) = DiffX0 - lateral
DiffY(sens) = DiffY0 + sens*longi ;
Quand on fais une commande +1 tout les offset se déplace dans la même direction donc c est +1 pour tous les offset.C est l Offset d'origine qui doit être positif ou négatif selon le cote ou le sens.
// initialisation des positions
tableDePosition[0].longi=0;
tableDePosition[0].lateral=0;
tableDePosition[0].alti=0;
Ça je comprend pas .... Si c'est pas une erreur je suis très intéressé (ça ressemble beaucoup a un objet)
mais l approche des tableau peu être très intéressante.
ce qui est noté x et y en fait c'est bien ces diffX et diffY
Ca c'est OK. J'ai fais la différence parce que la partie "Cinematique_inverse" peut servir pour d'autre chose en créant un nouveau module utilisant la "Cinématique_inverse" je voulais que ça reste clair au niveau de "x,y,z" et ou les "Diff" n'auraient pas de sens.
Posté par
sur 04 août 2016 - 04:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Petit precision parce que c est pas tres clair dans mes screen shoot :
DiffX et DiffY sont des valeurs absolu
Posté par
sur 06 août 2016 - 12:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
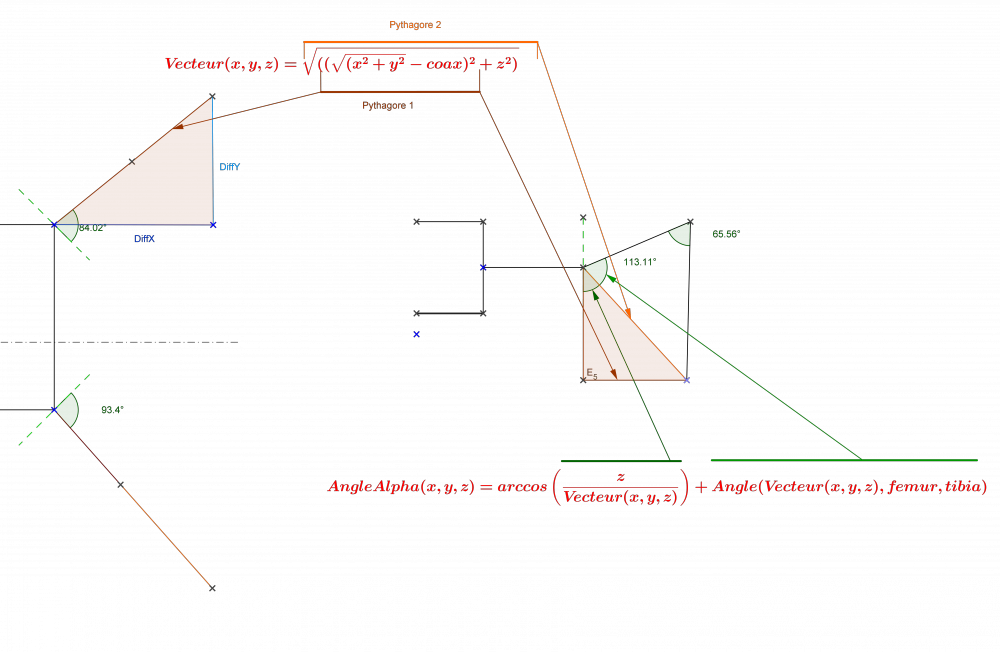
1/ Pourquoi tu applique deux fois pythagore dans la fonction Vecteur ??
2/ Pourquoi tu rajoute z/Vecteur(x,y,z) a alpha ?
3/ Comment fonctionne sens et cote ?
4/ Les variable (x,y,z) ces moi qui doit les définir avec une valeur ???
5/ Ces quoi la différence entre lateral,longi,alti et (x,y,z) ??
sens,cote,x,y,z ne sont pas des variable mais des arguments de fonction
si tu regardes bien, mon système mathématique n'est construit que de fonction qui s'appellent les unes les autres
et elles définissent seule comment appliquer la cinématique inverse a chaque angle selon la patte
Je l'ai écris pour l appeler le plus naturellement possible
tu veux l angle alpha de la patte avant droite = AlphaPatte(avant,droite)
tout le reste se fais tout seul :
AlphaPatte appelle la fonction AngleAlpha(x,y,z)
AngleAlpha prend 3 argument (qui sont 3 fonction)
x = la distance x entre l Offset et le pied qui n'est pas la même selon si elle est à droite ou a gauche (cote)
y = la distance y entre l Offset et le pied qui n'est pas la même selon si elle est à l'avant ou l'arrière (sens)
Z = pour toi pour l instant pas d argument mais ça viendra (le miens avec gyro dois savoir s il est sur le ventre ou sur le dos il prend en argument haut et bas
ect .....
donc tu vois bien que quand tu appels la fonction AlphaPatte toutes les autres sont appelé automatiquement avec les bon arguments .
BetaPatte(avant,gauche) et BetaPatte(arriere,droite) ne renvoient pas le même résultat mais elles appellent les fonctions nécessaire avec les bon argument pour que ça corresponde bien a l angle beta de la patte avant gauche et arrière droite.
Latéral commande de déplacement latéral (droite gauche) du CORPS du robot
Longi commande de déplacement longitudinale (avant, arrière) du CORPS du robot
Alti commande de déplacement altitude(monter, descendre) du CORPS du robot
Alors je sais que quand tu vas comprendre parfaitement comment ça marche, tu vas voir une façon beaucoup plus simple de le faire marcher sans Offset et sans les différentiel, mais ton IK sera figé. Cette structure te laisse la porte ouverte pour faire ce que tu veux.
exemple, comme moi, module Position corps ,et juste pour la moitié des Offset de mon robot (je t'épargne les équations)
Et la tu devrais comprendre pourquoi je te dis de bien structurer ton programme parce que ça prend très vite beaucoup de place
sur ce que tu a fais (je l ai juste survolé pas regardé en détail et je je suis pas bien placé pour t aider en codage je vais laisser ça à d autre) mais j ai quand même vu des erreur.
dans le loop (je pense que tu l auras compris ) toute ces fonctions non rien a faire la, elle sont appelé par:
AlphaPatte
BetaPatte
GammaPatte
et même ces fonctions la, devrait être appelé par une boucle sur l'asservissement des servo
les arguments de fonction (x,y,z,sens,cote) ne se déclare pas se sont des arguments
tu peux créer une fonction pour les "serial print"
y a des erreurs .
#define Avant 1
#define Arriere1
#define droite 1
#define gauche1
#define bas 1
#define haut1
#define Avant 1
#define Arriere -1
#define droite 1
#define gauche -1
#define bas 1
#define haut -1
il faut bien comprendre qu'une valeur comme "largeur/2" vaut pour la droite et la gauche
avec la fonction : OffsetX(cote)=largeur/2*cote
quand tu appels :Valeur+OffsetX(droite) c'est égale à Valeur+(largeur/2)
Valeur+OffsetX(gauche) c est égale à Valeur-(largeur/2)
je trouve ça trop "fouillis" (avis perso, peut être a tord)
int Mouvement_Alpha_Patte(double sens, double cote)
{
Alpha_Patte = Angle_Alpha(Mouvement_DiffX(cote), Mouvement_DiffY(sens), Mouvement_DiffZ(sens));
Serial.print("Alpha_Patte=");
Serial.print(Alpha_Patte,DEC);
Serial.println();
}
je ne sais pas coder mais ça devrais ressembler plutôt à ça:
A L'AIDE Mike 118
int Alpha_Patte(double sens, double cote)
{
Resultat = Angle_Alpha(DiffX(cote), DiffY(sens), DiffZ));
return Resultat;
}
Et ce pour toutes tes fonction
ça je comprends pas:
//Test :
for(int i =0; i<=1; i++)
{
//Avant droit Servos (1)
Move_Servo(AVD0,Gamma_Patte);
Move_Servo(AVD1,Alpha_Patte);
Move_Servo(AVD2,Beta_Patte);
//Arrière droit Servos (2)
Move_Servo(ARD0,Gamma_Patte);
Move_Servo(ARD1,Alpha_Patte);
Move_Servo(ARD2,Beta_Patte);
//Avant gauche Servos (3)
Move_Servo(AVG0,Gamma_Patte);
Move_Servo(AVG1,Alpha_Patte);
Move_Servo(AVG2,Beta_Patte);
//Arrière gauche Servos (4)
Move_Servo(ARG0,Gamma_Patte);
Move_Servo(ARG1,Alpha_Patte);
Move_Servo(ARG2,Beta_Patte);
}
GammaPatte, AlphaPatte, BetaPatte, de quoi? y a pas d'argument pour l IK !
//indiquer à l'IK de quelle patte il doit calculer cette angle Move_Servo(AVD0,Gamma_Patte(avant,droite)); Move_Servo(ARD0,Gamma_Patte(arriere,droite)); Move_Servo(AVG0,Gamma_Patte(avant,gauche));
Bien qu'en Python le code et plus court, je pense que même en C tu peux réduire énormément il y a beaucoup de chose inutile ou mal structuré tu devrais bien comprendre la base de cinématique inversé que je t ai faite avant d' essayer de la coder sinon tu arriveras pas à faire marcher ton robot.Comme je n'ai fais que survoler ton code y a peut être d'autre erreur mais je pense que tu vas le retravailler.
Posté par
sur 05 août 2016 - 12:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Si t'as besoin de précision sur des détails que tu comprends pas je suis dispo y'a qu'a demander 
Posté par
sur 10 août 2016 - 09:28
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
"aff" c'est juste une variable qui sert d interrupteur pour afficher les données une seul fois (vu que la fonction est appelé dans le "loop")quand on envoie une commande.
je préfère la "Programmation Orienté Objet" c'est pour ça que j'ai utilisé cette structure, tu peux décider de modifier le comportement du thorax dans "Position_corps" sans te préoccuper du fonctionnement de l'IK ou des pieds du robot idem pour les autres modules ,quelque soit le comportement du thorax ou des pieds l'IK gère ce qu il se passe entre les deux.
je pense que ça peu être la racine du programme de ton robot mais tu dois la comprendre et la maîtriser sur le bout des doigt et tu verras que tu peux tout faire avec . Un robot sur roue avec des capteur, le faire tourner selon les obstacle c'est "facile", avec nos robot à pattes ça devient tout aussi "facile" avec la cinématique inversé.
La partie "TEST" n'est juste la que pour te montrer que ça marche avant de le mettre sur ton robot et j ai calibré mes commande sur 1 unité(cm)pas asses fin pour des beau mouvement et c'est a remplacer par ton "protocol" maintenant que tu as les angles en degrés un simple "MAP" pour envoyer les données a tes servo .
ATTENTION c'est pas complet je ne t es pas mis les correction IK , limitation physique,Tempo, les genres de pas et les styles de marche de ton robot pour deux raison :
1 ) je les connais pas toutes et c est a toi de décider ce que dois faire ton robot.
2 ) j' ai longtemps bloqué sur des détails ou une mauvaise approche parce que je travaillé seul dessus, ta vision n'est pas la mienne donc je compte sur toi pour m'en m'apporter de nouvelle ou une nouvelles approche (D’ailleurs merci Mike 118 niveau prog. je pense que ta solution va m apporter beaucoup).
Posté par
sur 10 août 2016 - 05:39
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
moi j ai fais un petit truc pour une base de travail (désolé pour mon niveau de programmation les critiques son les bienvenu)
Pour mon exemple j ai utilisé les onglet ("fichier") disponible avec l IDE arduino ,le trie se fait par ordre alphabétique donc j ai placé une lettre avant le nom voulu pour les mettre dans le bonne ordre
Ouvres le moniteur serie pour tester le programme
Ouvres le moniteur serie pour tester le programme
Voici les différent onglet ("fichier") que j ai créé:
A_declaration
/***********CONSTANTE**************/ const float coax = 3.6; const int femur = 5; const int tibia = 10; const float largeur = 8.6; const float longueur = 11.1; const float hauteur_corps = 5.5; const float montageServo = radians(45); /********VARIABLE**************/ int aff = 0; float alti = 0; float lateral = 0; float longi = 0; /*********DEFINE**************/ #define empattement 7 #define avant 1 #define arriere -1 #define droite 1 #define gauche -1
B_Cinematique_inverse:
/*Calcul d'angle de cinématique inversé pour patte à 3 dgrés de liberté*/
/*---------------------------------------------------------------------*/
//Ici on gère les servo
// exemple : robot type fourmis on rajoute un servo entre le thorax et la queue
// je te le donne en etat de marche mais pas cles en main pour que tu comprenne son fonctionnement
//pour pouvoir faire tout ce que tu veux avec.
// Un indice sur ton premier probleme ton vecteur ne peut pas etre plus long que ta patte tendu! ;)
//Calcul de la longueur du vecteur Alpha => Pied
//Base calcul = THEOREME DE PYTHAGORE
float Vecteur(float x, float y, float z) {
float Resultat = sqrt(pow((sqrt(pow(x, 2) + pow(y, 2)) - coax), 2) + pow(z, 2));
return Resultat;
}
//Calcul d'angles avec AL-KASHI(théorème de Pythagore généralisé)
float Angle(float adj1, float adj2, float opp) {
float Resultat = acos((pow(adj1, 2) + pow(adj2, 2) - pow(opp, 2)) / (2 * adj1 * adj2));
return Resultat;
}
//Calcul de l'angle ALPHA
//Rotation sur le plan (X,Z)
float AngleAlpha(float x, float y, float z) {
float Alpha = (acos(z / Vecteur(x, y, z)) + Angle(Vecteur(x, y, z), femur, tibia));
return Alpha;
}
//Calcul de l'angle BETA
//Rotation sur le plan (X,Z)
float AngleBeta(double x, double y, double z) {
float Beta = Angle(femur, tibia, Vecteur(x, y, z));
return Beta;
}
//Calcul de l'angle GAMMA
//Rotation sur le plan (X,Y)
float AngleGamma(float x, float y) {
float Gamma = atan(y / x) + montageServo;
return Gamma;
}
C_Position_Corps:
/*************************POSITION CORPS ROBOT**************************/
/*Référentiel du chassis*/
//Ici (on oublie qu il a des pattes ;))et on definie la position du thorax
//exemple : on rajoute un gyroscope avec roulis et tangage on pourra lui demander
// de garder son plateau toujours de niveau que le sol soit en pente ou pas
float OffsetX(int cote) {
float Resultat = (largeur / 2) * cote + lateral;
return Resultat;
}
float OffsetY(int cote) {
float Resultat = (longueur / 2) * cote + longi;
return Resultat;
}
float OffsetZ() {
float Resultat = alti;
return Resultat;
}
D_Position_Patte:
/******************************POSTION PATTES ROBOT******************************/
/*Référentiel des pieds*/
//ici on definie ou doivent etre les pied (fixe dans mon exemple)
//exemple :longeur et hauteur des pas pour la marche
float PiedX(int cote) {
float Resultat = (largeur / 2 + ((coax + empattement) * cos(radians(90) + montageServo)))* cote ;
return Resultat;
}
float PiedY(int sens) {
float Resultat = (longueur / 2 + ((coax + empattement) * sin(radians(90) + montageServo))) * sens;
return Resultat;
}
float PiedZ() {
float Resultat = hauteur_corps / 2;
return Resultat;
}
E_Mouvement:
/****************MOUVEMENT ROBOT***************************************************/
/*Différentiel pour la cinématique inversé*/
//ici il s'agit du différenciel entre le thorax et le pied et donc la patte en elle meme
//exemple : tu rajoute un bras articulé c est ici que tu géres a quelle distance ce trouve
// la main de ton bras du thorax
float DiffX(int cote) {
float Resultat = abs(PiedX(cote) - OffsetX(cote));
return Resultat;
}
float DiffY(int sens) {
float Resultat = abs(PiedY(sens) - OffsetY(sens));
return Resultat;
}
float DiffZ() {
float Resultat = abs(PiedZ() + OffsetZ());
return Resultat;
}
float Alpha_Patte(int sens, int cote) {
float Resultat = degrees(AngleAlpha(DiffX(cote), DiffY(sens), DiffZ()));
return Resultat;
}
float Beta_Patte(int sens, int cote) {
float Resultat = degrees(AngleBeta(DiffX(cote), DiffY(sens), DiffZ()));
return Resultat;
}
float Gamma_Patte(int sens, int cote) {
float Resultat = degrees(AngleGamma(DiffX(cote), DiffY(sens)) * cote * sens);
return Resultat;
}
F_TEST
//ici je me suis pas pris la tete ;))
void instruction() {
Serial.println("Instruction de commande disponible :");
Serial.println("commande Alti +/- => z/a");
Serial.println("commande Lateral +/- => s/q");
Serial.println("commande Longi +/- => x/w");
}
void reception() {
char c = Serial.read();
if (c != -1) {
switch (c) {
case 'z':
alti = alti + 1; break;
case 'a':
alti = alti - 1; break;
case 's':
lateral = lateral + 1; break;
case 'q':
lateral = lateral - 1; break;
case 'x':
longi = longi + 1; break;
case 'w':
longi = longi - 1; break;
default:
instruction();
}
aff = 1;
}
}
void Patte(int sens, int cote) {
Serial.println(Alpha_Patte(sens, cote));
Serial.println(Beta_Patte(sens, cote));
Serial.println(Gamma_Patte(sens, cote));
}
void envoie() {
if (aff == 1) {
aff = 0;
Serial.println("Patte avant droite");
Patte(avant, droite);
Serial.println("Patte avant gauche");
Patte(avant, gauche);
Serial.println("Patte arriere droite");
Patte(arriere, droite);
Serial.println("Patte arriere gauche");
Patte(arriere, gauche);
}
}
G_Process
//sans commentaire ;)
void setup() {
Serial.begin(9600);
instruction();
}
void loop() {
reception();
envoie();
}
Voila j'espère que ça va t'aider
Posté par
sur 24 juillet 2016 - 01:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Impressionnant!!!
bravo
Posté par
sur 13 septembre 2016 - 06:48
dans
Impression 3D et Imprimantes 3D
Posté par
sur 20 août 2016 - 04:27
dans
Impression 3D et Imprimantes 3D
Ça fais bien longtemps que je rêve d'une imprimante 3D et ton sujet va peut être me faire sauter le pas en me faisant découvrir la
Discovery200. Elle a l'air d'avoir tout ce qui me manquait , le prix , la simplicité , un SAV français.... Il me manque juste un avis objectif sur le bruit qu'elle émet. Je suis en appartement (pas de sous sol et encore moins d atelier pour la mettre, elle devra rester dans mon bureau) du coup je me pose la question niveau vibration pour les voisins et niveau bruit dans l appartement (si elle doit tourner plusieurs heure il faudrait quand même qu'elle soit relativement discrète surtout si elle doit tourner la nuit




