Posté par
Posté par
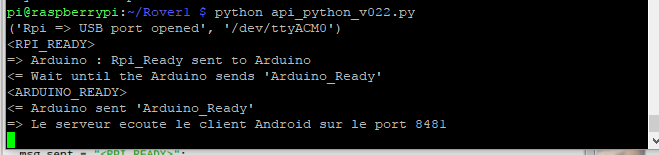
La synchronisation RPI <-> Arduino fonctionne maintenant après avoir déplacé le code de traitement du message RPI_READY envoyé par la RPI coté Arduino , de la boucle Setup vers la boucle Loop .
Mais cela ne marche que si l'Arduino a terminé sa sa boucle "Setup"
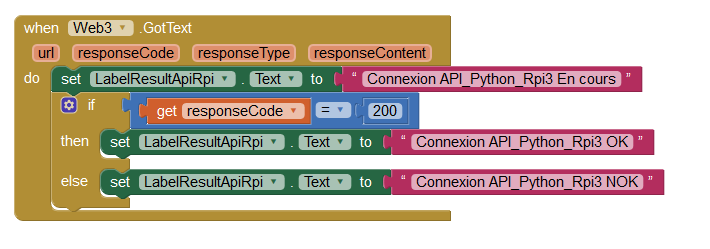
Reste à faire le test de la mise à jour de l'App Android "Test connection App <-> Arduino"