Oui ! C'est ce qui m'a rassuré quand à la faisabilité du projet. Cette chaîne en particulier m'a pas mal aidé :
https://www.youtube....r/submarineboat
Contenu de Bacab
Il y a 108 élément(s) pour Bacab (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#96740 Little Yellow Submarine (L.Y.S.)
 Posté par
sur 26 juin 2018 - 07:20
dans
Robots sous-marins bateaux et autres systèmes aquatique
Posté par
sur 26 juin 2018 - 07:20
dans
Robots sous-marins bateaux et autres systèmes aquatique
#96570 Little Yellow Submarine (L.Y.S.)
Posté par
sur 20 juin 2018 - 09:37
dans
Robots sous-marins bateaux et autres systèmes aquatique
Bonjour à tous,
Comme je le disais dans un autre sujet, cela fait deux ans que je travaille à la réalisation d'un sous-marin filoguidé et j'aimerais vous présenter mon projet. Celui-ci se nomme L.Y.S. pour Little Yellow Submarine (comme dans le titre du sujet, c'est fou ça !) à la fois pour la référence (facile) à une chanson bien connue mais aussi parce que j'aimais bien l'acronyme du projet.
Le but de ce sous-marin est de permettre de filmer et d'écouter en temps réel ce qui se passe à quelques mètres sous la surface. Accessoirement j'espère pouvoir expérimenter avec l'hydrophone que j'ai fabriqué.
Voici les règles que je me suis fixé pour mon projet :
- le coût final des pièces détachées utilisés pour le sous-marin ne doit pas dépasser les 300 €;
- le sous-marin doit emporter une caméra frontale et envoyer la vidéo en temps réel à l'opérateur;
- le sous-marin doit remonter à la surface seul en cas de panne totale de l’électronique de bord.
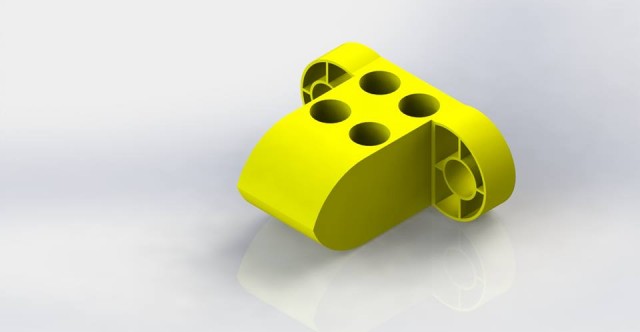
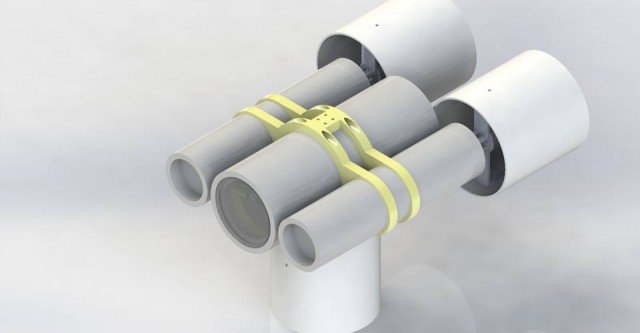
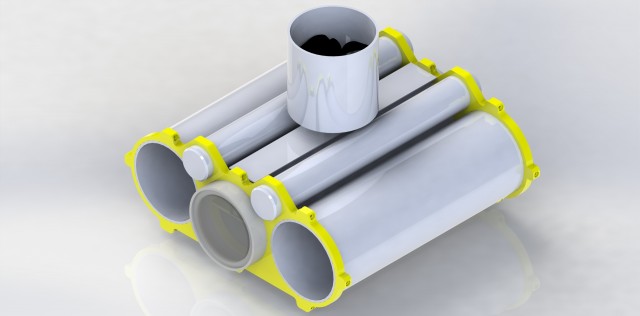
Après des heures de modélisation j'ai finalisé la conception et les plans : voici quelques rendus des différentes solutions qui ont traversé mon esprit :
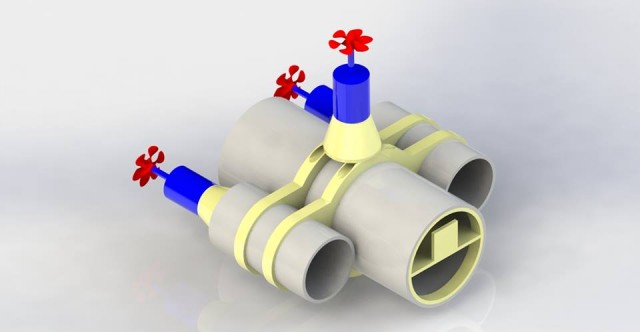
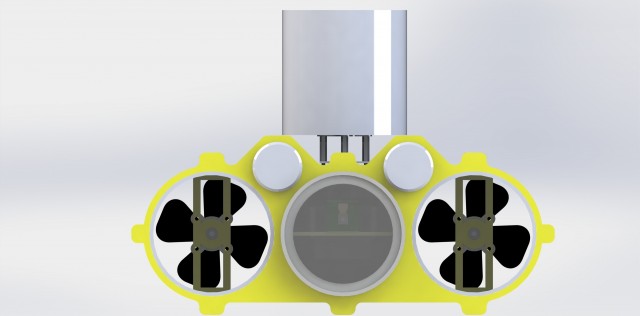
Et voici la modélisation finale :
La construction :

La première image de la caméra avec l'incrustation vidéo :
La solution définitive repose sur l'utilisation de trois moteurs brushless outrunner dont les bobines profiteront d'un traitement anti-corrosion et qui se situent à l'extérieure du compartiment étanche. Les câbles d'alimentations et le câble ethernet (pour les échanges avec l'opérateur en surface) passeront par la cloison à l'arrière du tube central.
L'étanchéité est garantie par des presses-étoupes de piscine.
Les pièces reliant les différents tubes entre eux sont imprimés en 3D par mon imprimante.
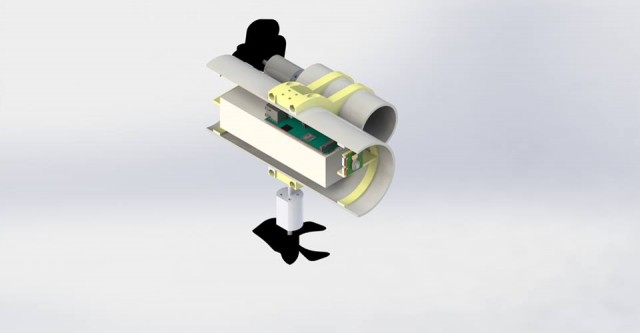
L'électronique à bord est constituée d'une Raspberry Pi 3. Elle gère la vidéo et les signaux PWM qui sont envoyés à un régulateur de drone quadricopter. Celui-ci assure également la régulation de l'alimentation électrique.
Le tout est alimenté par une batterie LiPo 4S, 5800 mAh.
La caméra est une raspicam. Je ne compte l'utiliser que pour fournir le flux vidéo en directe. L'enregistrement se fera à l'aide d'une GoPro.
Les moteurs sont des brushless outrunner Turnigy d'une puissance de 200 W (700 kV).
Les hélices sont des Graupner quadripales de 88 mm de diamètre.
Je ne travaille sur ce projet que pendant mes (rares) heures de loisirs et la construction avance lentement.
J'espère que vous trouverez ce projet intéressant et n'hésitez pas à me faire part de vos remarques, questions et suggestions.
#96568 Sous-marin
Posté par
sur 20 juin 2018 - 08:51
dans
Robots sous-marins bateaux et autres systèmes aquatique
Cela fait deux ans que je travaille sur un sous-marin filoguidé et même si mon cahier des charges est moins exigeant j'espère que mon retour pourra t'aider. Tout comme sky99 je pense que c'est une bonne idée de partir sur une base de tuyaux de PVC pour réaliser la coque. C'est en effet ben plus simple que d'essayer de concevoir une coque maison. C'est en tout cas la solution que j'ai choisi.
Plutôt que de trop m’embêter avec des arbres d'hélices étanches j'ai choisi de placer les trois moteurs à l'extérieur du sous-marin. Cela me semble en effet plus facile de traiter les bobines pour éviter la corrosion.
J'ai passé beaucoup de temps à modéliser toutes les pièces avant de me lancer dans la réalisation et voici quelques rendus et images de la construction :
#95702 Vitesse maximale de rotation d'un roulement/joint SPI
Posté par
sur 23 mai 2018 - 08:18
dans
Mécanique
Pour les bateaux rc on a un tube d’étambot avec a chaque exterminer un pallier en laiton bien ajuster avec l'axe et le tube remplie de gras. Et ceux pour des vitesses de rotation très élevé.
Merci pour ta réponse.
Oui c'est ce que j'utilise aussi dans mes bateaux mais un tube d'étambot serait trop long pour le projet que j'ai en tête.
#95679 Vitesse maximale de rotation d'un roulement/joint SPI
Posté par
sur 22 mai 2018 - 05:47
dans
Mécanique
Merci pour ta réponse.
L'axe en question ne dépassera pas le M5 (ne serait-ce que parce qu'il n'existe pas à ma connaissance d'hélice en M6, M5 semble être le max. chez mon fournisseur) donc j'ai l'impression que pour ma gamme de vitesse cela devrait aller (2.5 m/s à 3 m/s en vitesse tangentielle).
Sauf situation de test (donc bref) le joint spi sera toujours immergé.
#95667 Vitesse maximale de rotation d'un roulement/joint SPI
Posté par
sur 22 mai 2018 - 03:28
dans
Mécanique
Bonjour,
Il est possible que dans un avenir proche je sois obligé d'utiliser un joint spi pour assurer l'étanchéité autour d'un arbre d'hélice et j'aurais voulu savoir s'il était utile de se soucier d'une éventuelle vitesse maximale de rotation tolérée vu que chez la plupart des commerçants en ligne rien n'est mentionné à ce sujet. Idem pour les roulements à billes : certains revendeurs mentionnent des vitesses maximales et d'autres non, donc est-ce vraiment utile de s'en soucier ?
La vitesse de rotation max. que j'ai en tête pour mon utilisation est ~11000 tr/min (V max. en sortie du moteur).
Par avance merci pour vos réponses.
#95606 Présentation Bacab
Posté par
sur 20 mai 2018 - 10:04
dans
Et si vous vous présentiez?
Merci !
#95579 Présentation Bacab
Posté par
sur 20 mai 2018 - 04:29
dans
Et si vous vous présentiez?
Bonjour à tous et à toutes,
Comme il est d'usage voici ma présentation : je suis un jeune ingénieur en électronique et j'occupe mon temps libre à la conception et à la réalisation de robots et de modèles réduits. Généralement je me débrouille pas trop mal pour concevoir l'électronique de mes projets mais quand arrive la partie mécanique je me retrouve fort dépourvu et j’espère trouver au sein de la communauté des personnes capables de m'aider (et réciproquement j'espère que je pourrais aider en retour !).
J'ai participé à la coupe de France de robotique il y a quelques années (Beach bots) avec plusieurs amis après quoi je me suis lancé dans la conception d'un R.O.V
A part ça je suis un amateur de jeux vidéo, passionné d'aviation et fan de Star Wars.
Je vous remercie par avance pour votre accueil.




