Posté par
Posté par
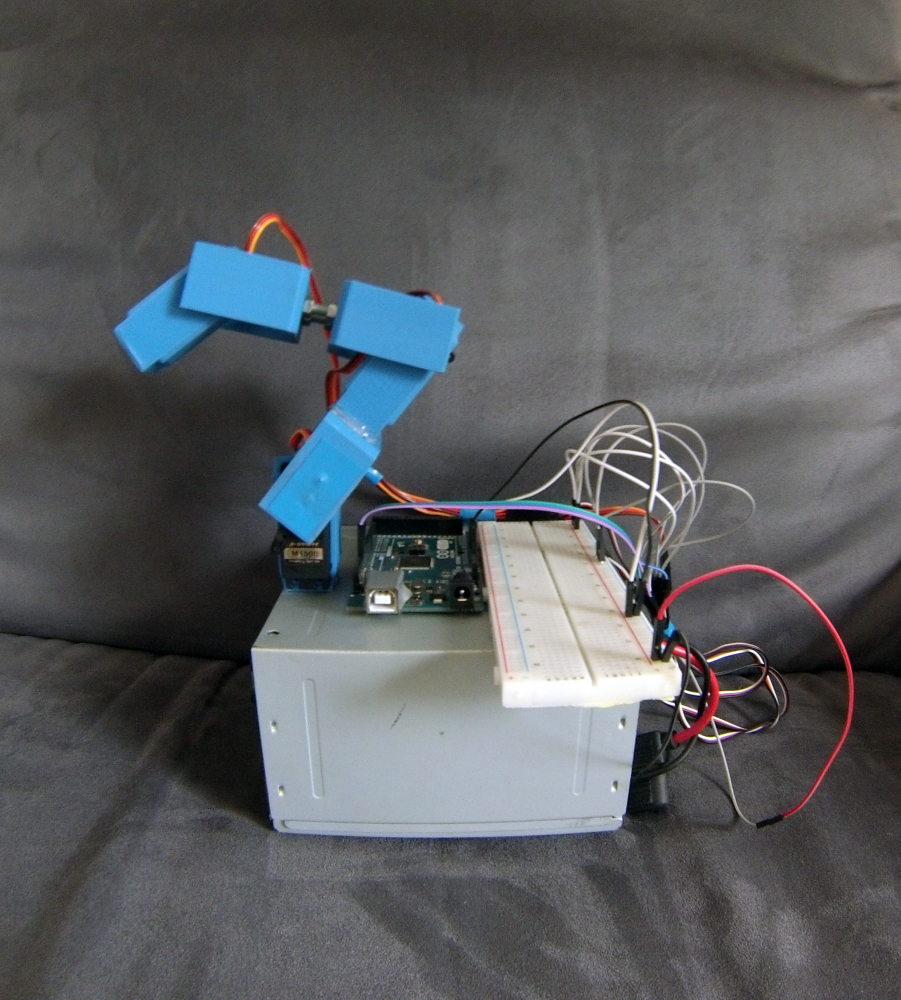
Après de multiples tests les servosmoteurs du bras fonctionne correctement il n'y a plus qu'a programmer tout ça sur une carte arduino.
but de l'algo :
-on entre une distance (trouvée par un capteur ultrason par exemple) qui correspond a la distance entre objet a attrapé et la base du bras
-on calcule toutes les positions d'angles des 4 servo moteurs pour que le bout du bras se trouve a cette distance
-on les applique sur les servo
-on croise les doigts pour que tout marche comme prévu par les calculs 
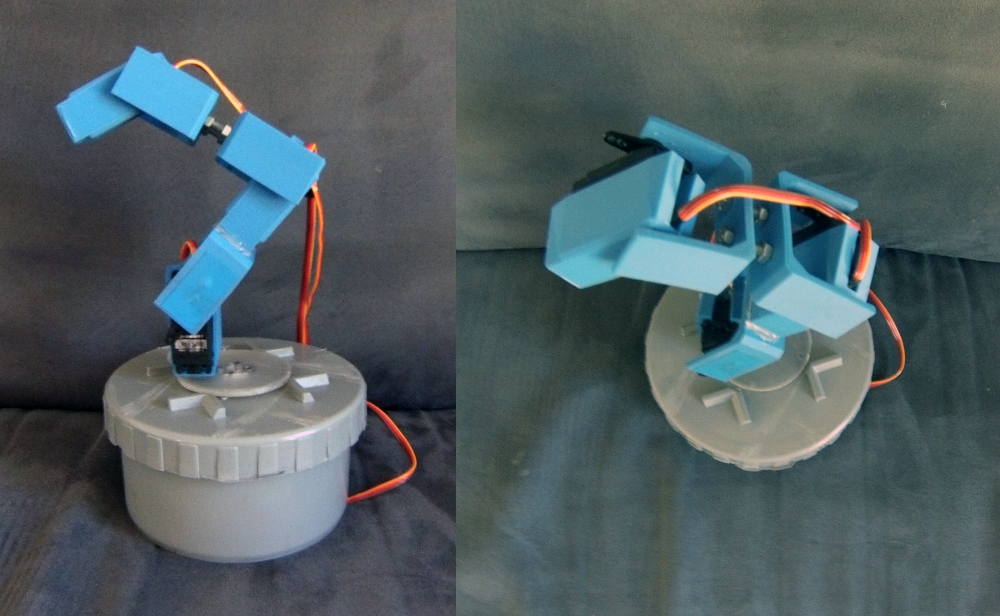

 ] mais le résultat fut que le bras avait du mal a soulever un pauvre stylo et tremblait sans arrêt avec un bruit horrible )
] mais le résultat fut que le bras avait du mal a soulever un pauvre stylo et tremblait sans arrêt avec un bruit horrible )