Bonjours a tous,
Il y a bien longtemps que je me suis mis en tète de faire un bras robotique... le problème c'est que je n'avait pas les servos nécessaire à la réalisation de celui-ci.
(enfin j'ai bien essayer avec les micro tower pro sg90 [plutôt leur réplique achetée par pack de 8 sur un site douteux Chinois  ] mais le résultat fut que le bras avait du mal a soulever un pauvre stylo et tremblait sans arrêt avec un bruit horrible )
] mais le résultat fut que le bras avait du mal a soulever un pauvre stylo et tremblait sans arrêt avec un bruit horrible )
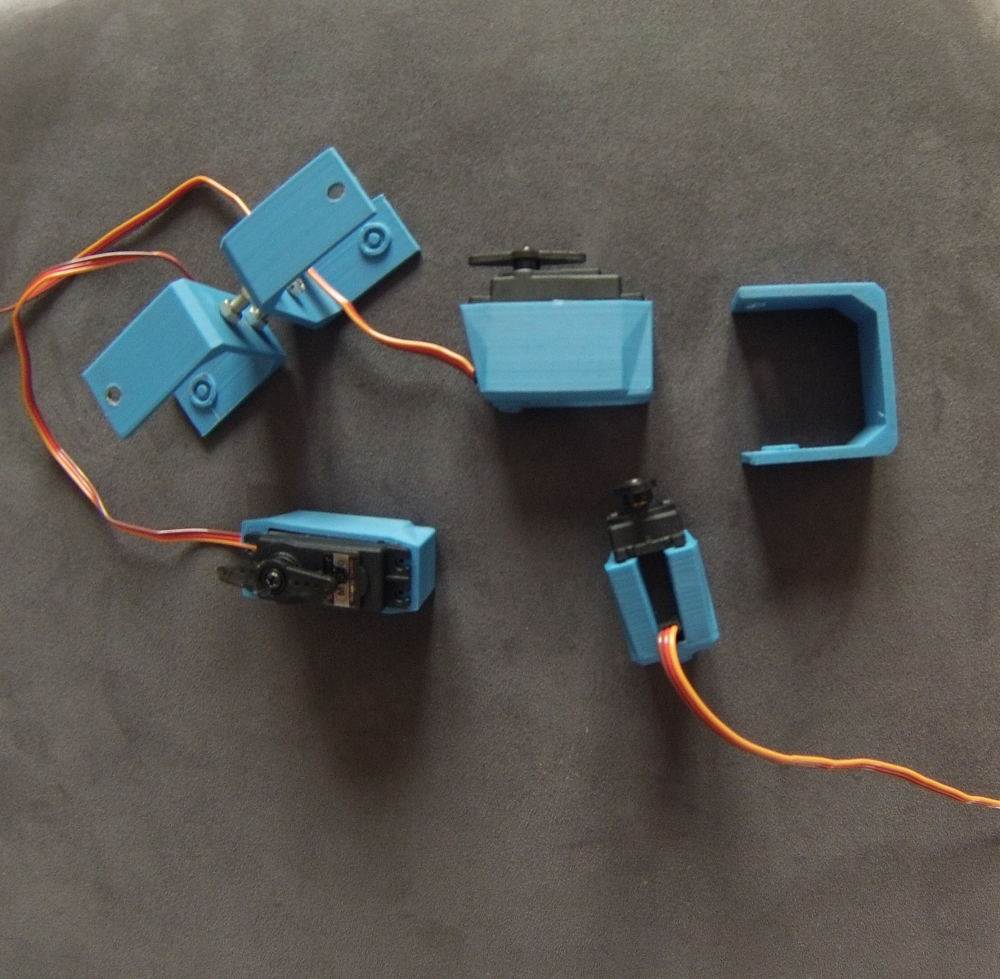
J'ai donc acheter pour pas trop cher 4 servos k-power M-1500 supposés soulever 16kg/cm (ce qui est raisonnable je trouve )
que j'ai reçu et tester et qui semblent tenir leur promesses. 
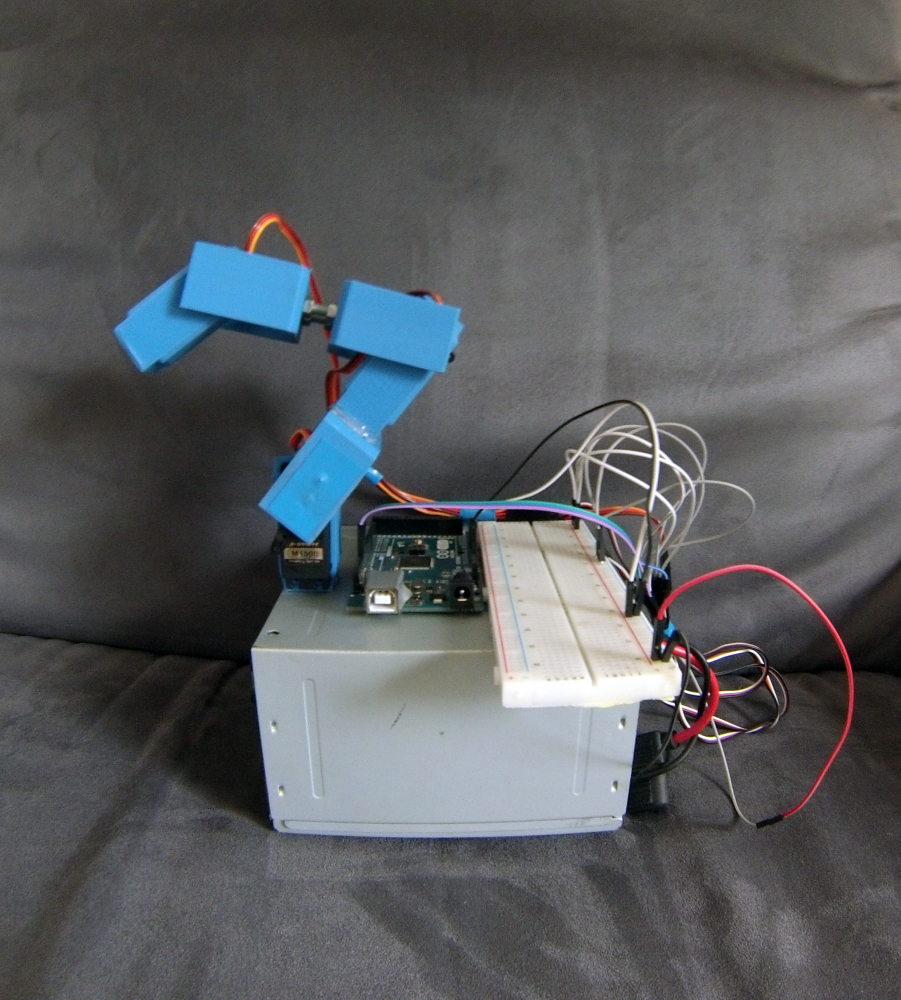
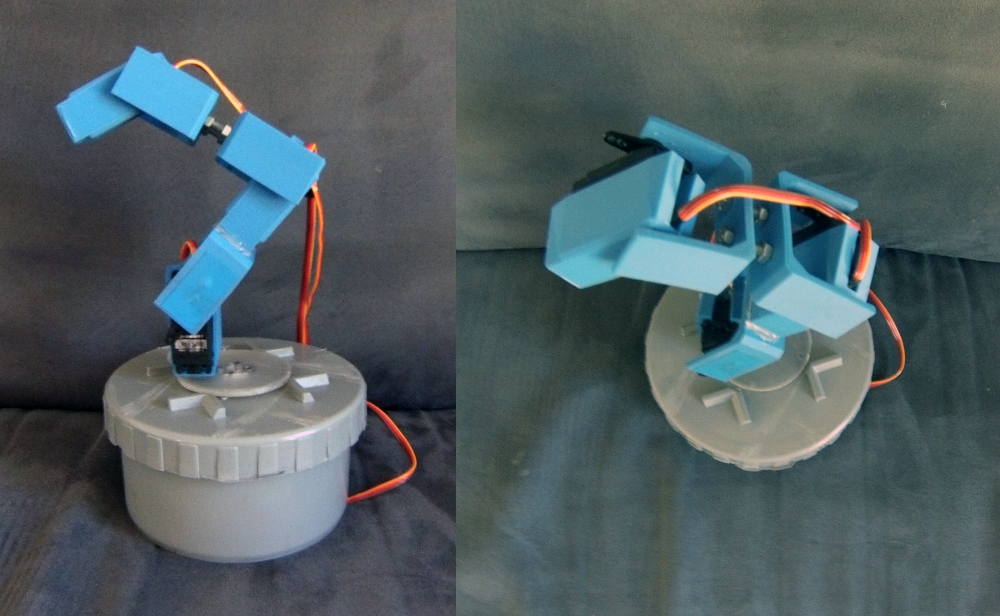
Avec Sketchup j'ai donc créer un modèle 3d pour faire une "coque articulée" à mes nouveaux jouets et pouvoir les utiliser dans mon bras :
(plutôt pas mal pour une première dans la 3d non ?)
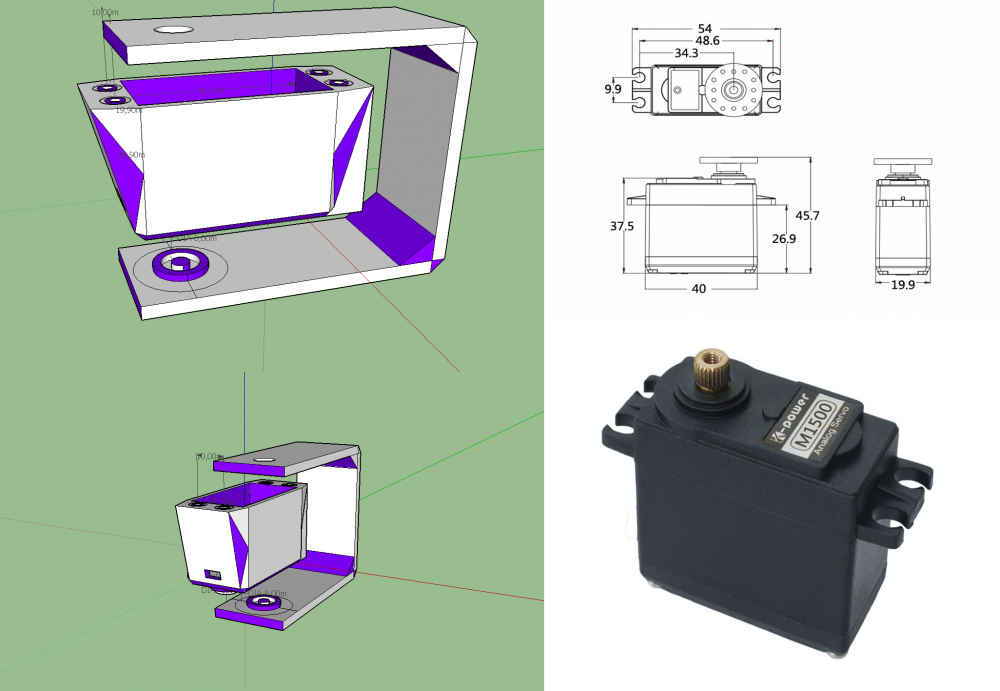
(oui c'est en M je vais changer les cotes pour l'impression en cm )
Je vais aller embêter mon voisin qui dispose d'une imprimante 3d collaborative.
Voila je vous tien au courant de l'avancement des que possible (la c'est que le début du début).
si vous avez déjà réalisé des projets comme ça je prends touuuuuuuuuuut les conseils merci 
Bises.