Posté par
Posté par
Bonjour !
Voici un nouveau sujet qui concerne le test de la radio commande 6 voies.
Déballage:
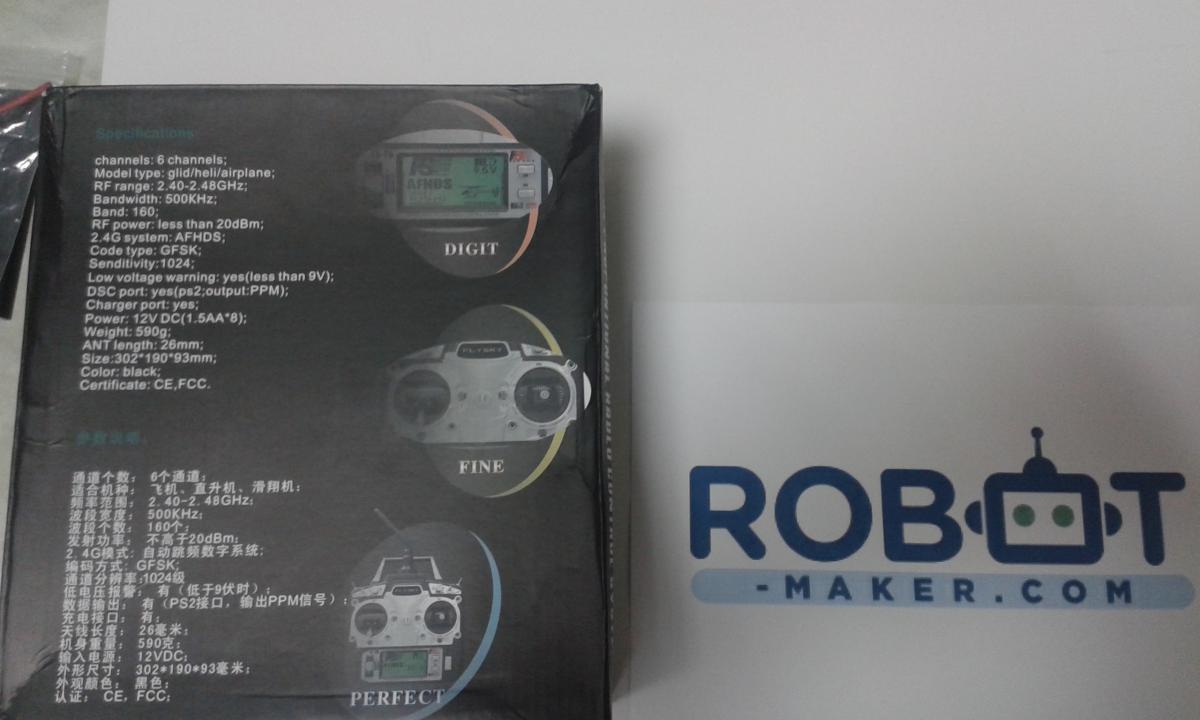
la télécommande dans son carton avec les caractéristiques au verso:

Passons à l'ouverture de la boîte:


La boîte contient : la télécommande, le récepteur avec un connecteur, un cd avec la notice.
La télécommande et les autres éléments sont contenu dans un emballage plastique qui possède la forme de la télécommande, plutôt pratique pour le rangement !
Mes impressions : La télécommande est facile à prendre en main et assez légère. Les joysticks ont une partie métallique qui permet une très bonne adhérence (attention toutefois à ne pas se griffer dessus lors des premières utilisations  ).
).
Il est temps de passer à la mise en marche !
J'observe les données transmises par la radiocommande. Pour ça, j'utilise une carte clone arduino uno que je relie au récepteur.
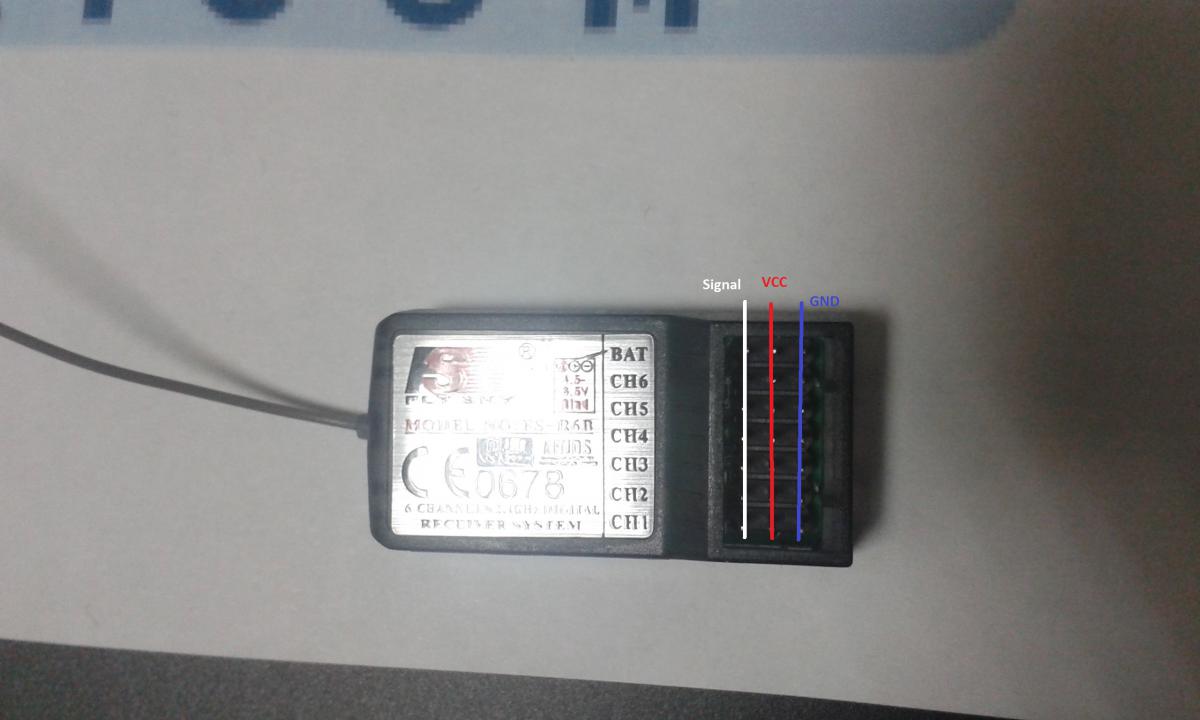
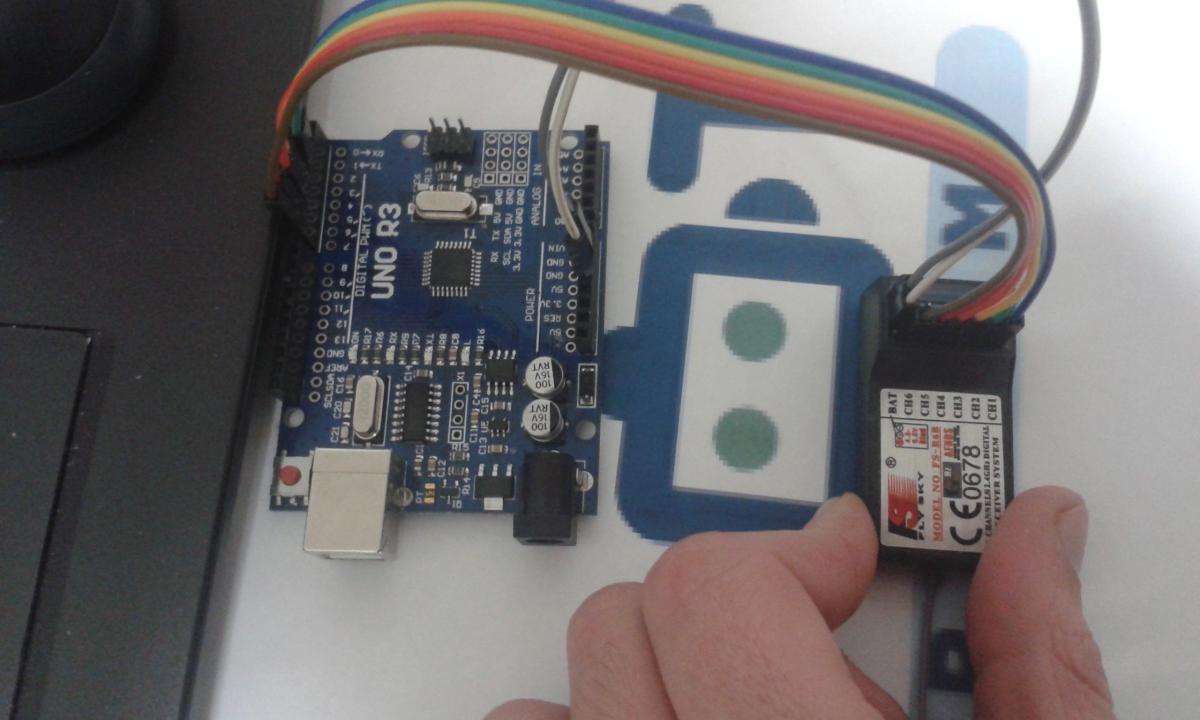
Les signaux émis par la radiocomande sont de type PWM (Pulse Width Modulation), donc les broches de signaux du récepteur sont connectées aux entrées digitales de l'Arduino.
Pour mesurer les largeurs d'impulsions qui correspondent aux différentes informations, on peut utiliser la fonction "pulseIn".
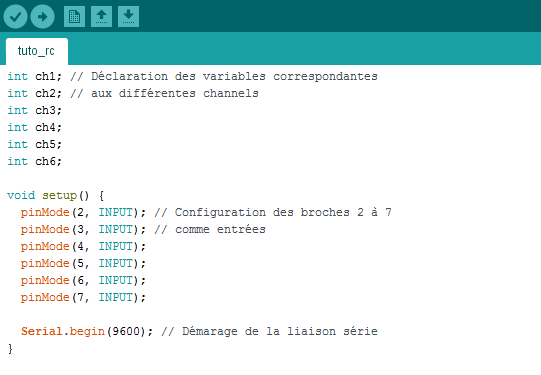
J'ai utilisé le programme suivant pour afficher les données :
Je mets en dessous le code et une image une fois dans l'IDE (au cas ou le web editor ne fonctionne pas  ).
).
int ch1; // Déclaration des variables correspondantes
int ch2; // aux différentes channels
int ch3;
int ch4;
int ch5;
int ch6;
void setup() {
pinMode(2, INPUT); // Configuration des broches 2 à 7
pinMode(3, INPUT); // comme entrées
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
pinMode(7, INPUT);
Serial.begin(9600); // Démarage de la liaison série
}
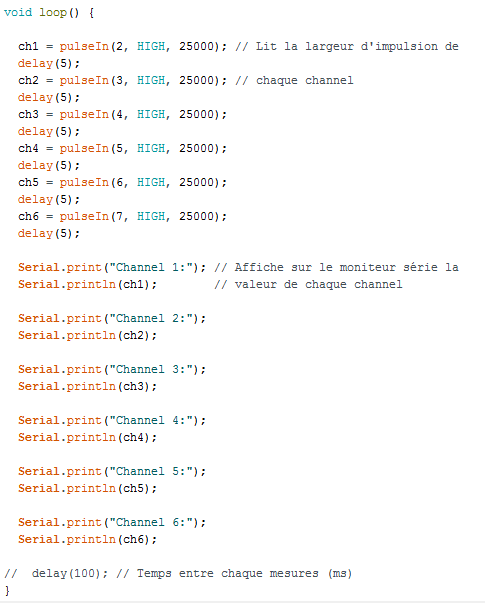
void loop() {
ch1 = pulseIn(2, HIGH, 25000); // Lit la largeur d'impulsion de
delay(5);
ch2 = pulseIn(3, HIGH, 25000); // chaque channel
delay(5);
ch3 = pulseIn(4, HIGH, 25000);
delay(5);
ch4 = pulseIn(5, HIGH, 25000);
delay(5);
ch5 = pulseIn(6, HIGH, 25000);
delay(5);
ch6 = pulseIn(7, HIGH, 25000);
delay(5);
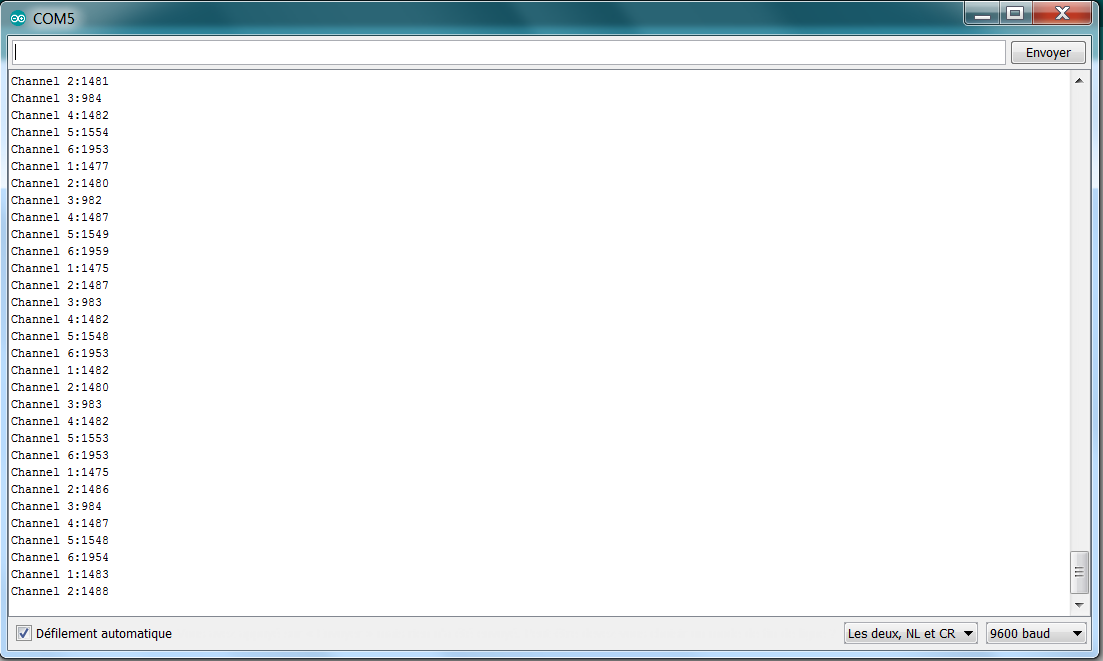
Serial.print("Channel 1:"); // Affiche sur le moniteur série la
Serial.println(ch1); // valeur de chaque channel
Serial.print("Channel 2:");
Serial.println(ch2);
Serial.print("Channel 3:");
Serial.println(ch3);
Serial.print("Channel 4:");
Serial.println(ch4);
Serial.print("Channel 5:");
Serial.println(ch5);
Serial.print("Channel 6:");
Serial.println(ch6);
// delay(100); // Temps entre chaque mesures (ms)
}