 Posté par
Posté par
Bonjour à tous,
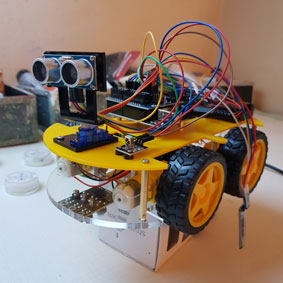
Mon robot est actuellement pilotable par l'intermédiaire d'un smartphone.
Je souhaite utiliser une télécommande de casque VR tel que ci-dessous

Cette télécommande peut télécommander un smartphone, une tablette (le volume, changement de page, avance recule d'une vidéo, etc...)
Ma question est :
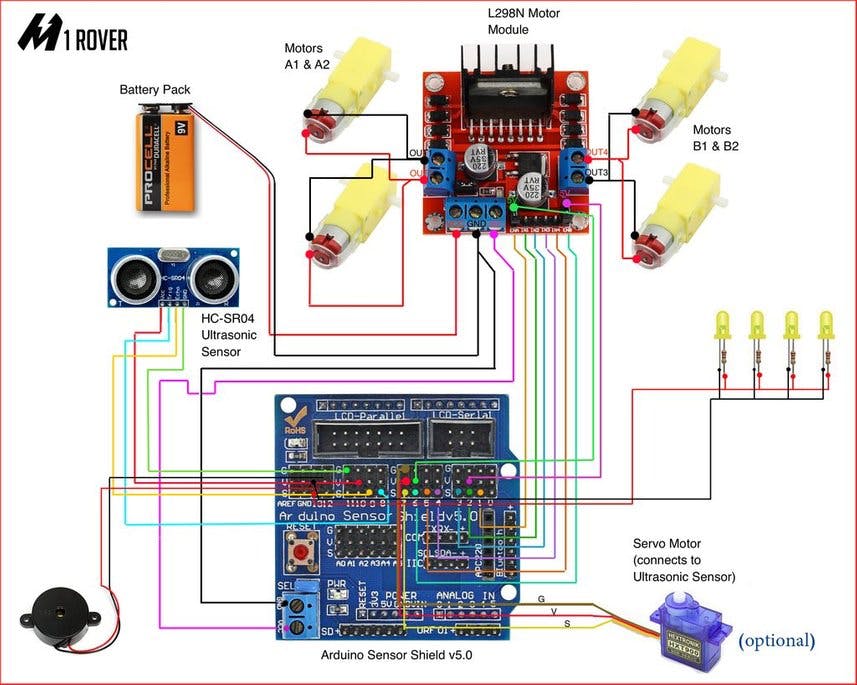
Comment coupler cette télécommande avec le HC-06 arduino, afin que je puisse télécommander le robot.
J'ai aussi envisager une télécommande radio.
Qu'en pensez vous ?
Merci

 .text+0x0): first defined here
.text+0x0): first defined here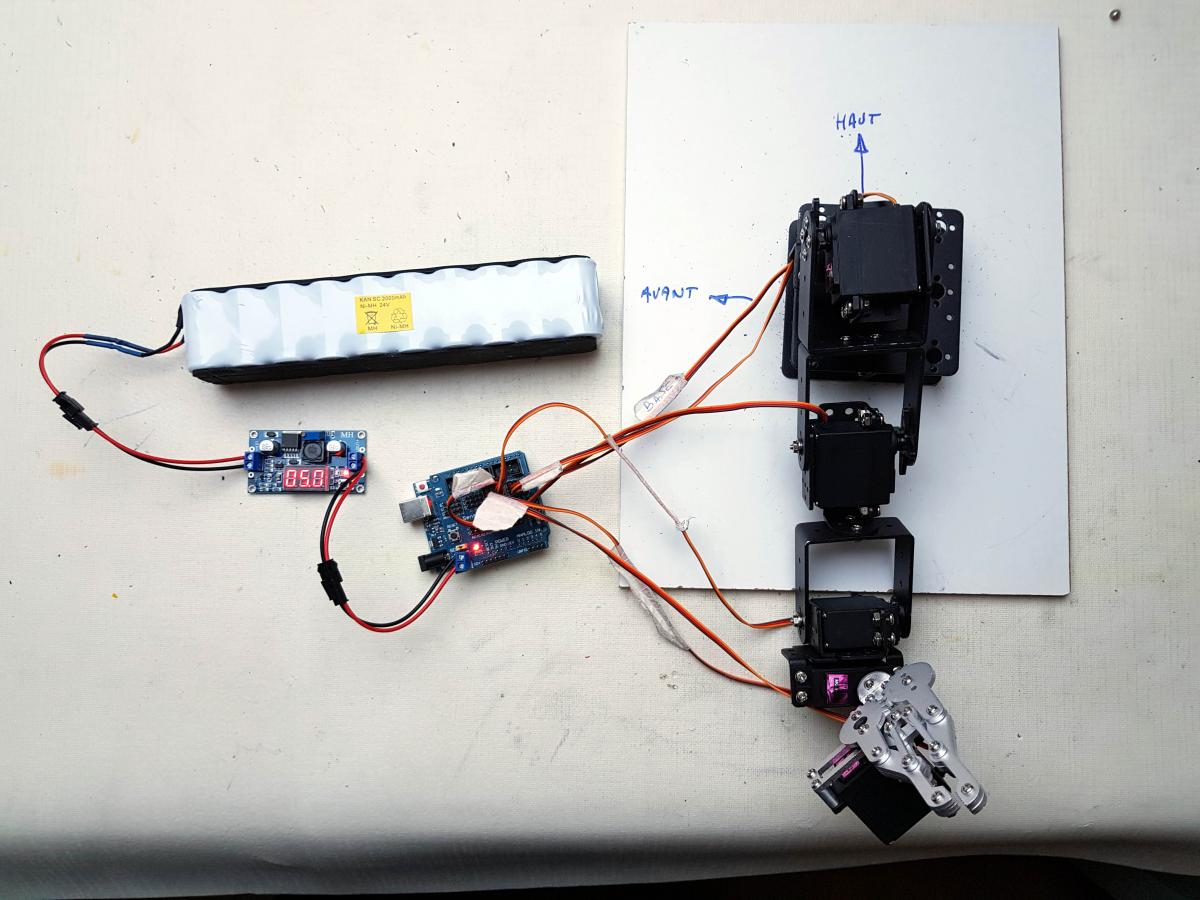








{kind=link}