

Salut à tous,
Je vous ai dévoilé mon projet dans ma présentation.
En fait, j'ai acheté ce petit jouet à mon petit fils et j'ai été séduit par cette petit robot. Je me suis mis en tête de l'agrandir à la taille d'un mètre vingt et d'essayer d'en faire un robot ( domestique )
Ma femme ma dit "Qu'il fasse le ménage !!!" Bon, moi je serais plutôt tenté par un tue mouche à laser.
Je pense travailler ce robot en 3 étapes.
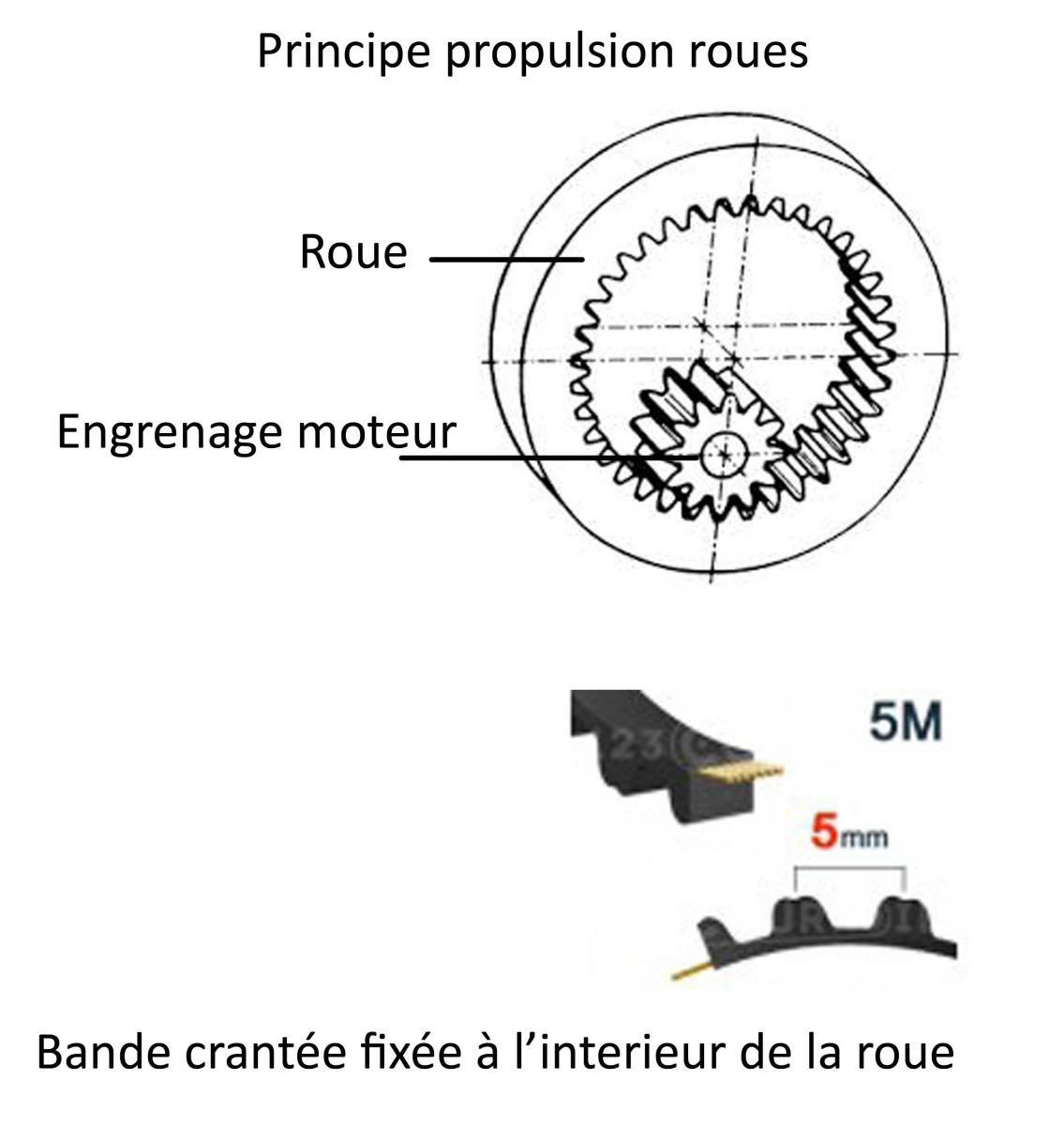
1. Déplacements
2. Mouvements du corps et des bras, de la main (pince) Vision avec caméra, etc...
3. L'informatique. J'aimerais q'un ordinateur gère le robot.
Comme il faut bien commencer quelque part je vais me pencher sur ses déplacements. Je possède un robot aspirateur hors service et je pense utiliser quelques pièces. Moteurs, détecteurs de chutes, gps si il en possède un. Je suppose que oui puisqu'il est censé effectuer une cartographie de la zone à aspirer.
Vu la taille du robot (et des roues) je pense utiliser un petit tricycle d'enfant.
Une idée qui me vient en tête est de demander des plans au fabricant du robot. Qui ne tente rien n'a rien. Je risque juste un refus et le prix d'un timbre.
La majeurs parties des pièces doivent être de récupération. Surtout pour la carrosserie.
Qu'en pensez vous ? Vos avis, même négatif seront le bienvenu.
A+























{kind=link}