Inspiré du segway, ou par exemple : http://ozzmaker.com/success-with-a-balancing-robot-using-a-raspberry-pi/
Je meurs d'envie d'avoir vos remarques. Ma démarche est empirique. Je n'ai pas fait de calculs préalables. Je veux expérimenter. C'est un projet en cours. Je le veux debout, 30 à 50 cm de haut, sur 2 roues, autonome et évolutif.
J'avais un Raspberry PI 2 et un Sense Hat. Il me manquait des moteurs, des roues, un pilote pour les moteurs et surtout un chassis.
Pour le chassis, j'ai pris le modèle openbeam (http://www.makerbeam.com/). J'ai craqué sur ce genre de mecanno. Ca donne un montage propre mais c'est lourd.
J'ai ajouté un double pont en H, le Breakout L298 compatible avec les 3,3V du rPI. Avec ses 2A max, j'ai pris des micro moteur 30:1 MP : Courant de blocage : 700mA. J'ai alimenté les moteurs avec un transformateur 5V 2,1A
1er objectif, se tenir tout seul, sans osciller (le moins possible). Je n'y suis pas encore !!
Avec le poids du robot ces petits moteurs (0,5 kg/cm) ne se mettent en marche à partir de 60% du duty time sur la sortie PWM. Pas assez alimenté et des roues trop petites, à mon avis.
Coté logiciel, la théorie : https://en.wikipedia.../PID_controller
Le source en python V0.0. C'est tout chaud.
https://gist.github....65991b2a5e61b0f
Premiers essais. Faute de puissance, il n'y a pas de modulation, on voit l'oscillation et surtout, il est incapable de se tenir seul.
NB. pour cette video, le paramètre bouncetime du bouton était à 75. J'ai compris après d'ou venait le problème. A 1s, cela fonctionne très bien.
Prochaines étapes :
- Augmenter la puissance des moteurs. Je vais aussi changer de contrôleur pour les moteurs.
Je vise les gros 37D à 12V de Pololu https://www.pololu.com/product/1106 avec des batteries NiMH 12V et le contrôleur http://www.robotshop.com/eu/fr/controleur-deux-moteurs-dc-10a-5-25v.html
- Faire une interface pour modifier les constantes PID en live. Je n'ai pas fini de tester ces 3 constantes.
- Explorer encore la théorie des pendules inversés. J'en ai vu ici 
Objectifs suivants : avancer, tourner et commander le robot via une appli web hébergé directement sur le rPI.
Je vous tiens au courant de la suite.


Ash, Self balancing robot
#1

-
- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 06 février 2016 - 11:23
#2
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 07 février 2016 - 12:07
#3
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 07 février 2016 - 01:30
Salut Ashira,
Merci pour l'accueil.
 Je te confirme que c'est pas équilibré du tout. Je ne peux pas utiliser l'algorithme PID. Car les moteurs ne démarrent tout simplement pas quand ils portent le robot avec une modulation < 60%. Dans la video ils fonctionnent sur la plage 60 à 100%. Or cet algo doit faire démarrer les moteurs avec bien plus de douceur. J'imagine que des moteurs plus puissants permettent de corriger l'erreur d'inclinaison dès la plus faible inclinaison avec une vitesse très faible. Soit une modulation bien plus proche de 0%. D'après ce que j'ai compris.
Je te confirme que c'est pas équilibré du tout. Je ne peux pas utiliser l'algorithme PID. Car les moteurs ne démarrent tout simplement pas quand ils portent le robot avec une modulation < 60%. Dans la video ils fonctionnent sur la plage 60 à 100%. Or cet algo doit faire démarrer les moteurs avec bien plus de douceur. J'imagine que des moteurs plus puissants permettent de corriger l'erreur d'inclinaison dès la plus faible inclinaison avec une vitesse très faible. Soit une modulation bien plus proche de 0%. D'après ce que j'ai compris.
Tiens, ceux que j'ai installé pour le moment, c'est ça : https://www.pololu.com/product/2364. Alimentés en 5V et avec de la modulation, on doit être loin des 500g/cm nominaux du moteur. Le robot fait déjà 1,5 kg et j'ai l'intention d'en ajouter
Merci pour le conseil. J'aimerai bien jouer avec les PID mais pour le moment, je peux pas.
En attendant les moteurs, je prépare l'appli de commande.
#5
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 07 février 2016 - 02:16
C'est vrai que je n'ai pas essayé de moduler sur la plage 60 à 100%. L'idée ne m'est pas venue suite à mes tests.
J'ai fait plusieurs tests en tout ou rien (sans le PID) en baissant progressivement la valeur de modulation. D'abord à 100%, c'est la video. J'ai toute la patate dispo, on voit ce que ça donne : il faut moduler  J'ai baissé de 10 en 10. En dessous de 60%, plus de mouvement. Et à 60%, il bloque à la moindre inclinaison. Et repart trop vite si je l'aide à se redresser.
J'ai baissé de 10 en 10. En dessous de 60%, plus de mouvement. Et à 60%, il bloque à la moindre inclinaison. Et repart trop vite si je l'aide à se redresser.
Conclusion intuitive que j'en ai tiré : 60%, c'est la valeur la plus basse avec laquelle les moteurs démarrent. Mais à 60, c'est encore trop brusque. Je n'ai même pas essayé de corriger les plus faibles inclinaisons sur la plage 60-100 avec les valeurs PID.
Je peux aussi ajouter mon ressenti, entre les mains, je sens bien que ça manque de puissance. Avec une inclinaison encore faible, à 100%, le robot à du mal à redresser. C'est poussif. Au sujet de cette inclinaison que j'espère la version finale saura corriger. Je n'ai pas mesuré le max impossible à relever pour des moteurs à 100%. Et je sais que je devrai avoir cette limite. Elle servira à déterminer la vitesse max du robot quand il avancera. Mais je n'en suis pas là et je reviendrai dessus.
Autre piste : le condensateur pour envoyer de la patate au démarrage.
J'ai trouvé cette conversation : http://www.robot-maker.com/forum/topic/6882-resolu-moteur-qui-a-du-mal-a-demarrer/
Je retiens l'idée du condensateur sur le moteur DC. Ca fonctionne aussi sur une entrée PWM ?
#6
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 07 février 2016 - 02:59
Sinon ca pourrait marcher si tu le charges avec une tension supérieur (pas trop non plus sinon adieux les moteurs). Mais je n'ai jamais mis ca en oeuvre donc je ne peux pas vraiment t'aider. En tout cas ils devront être chargé rapidement pour encaisser les oscillations^^
#8
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 11 février 2016 - 10:04
Salut mes makers,
J'ai reçu la batterie et le chargeur. C'est une première pour moi.
C'est une batterie de 10 cellules de 12V à 4Ah, NiMH.
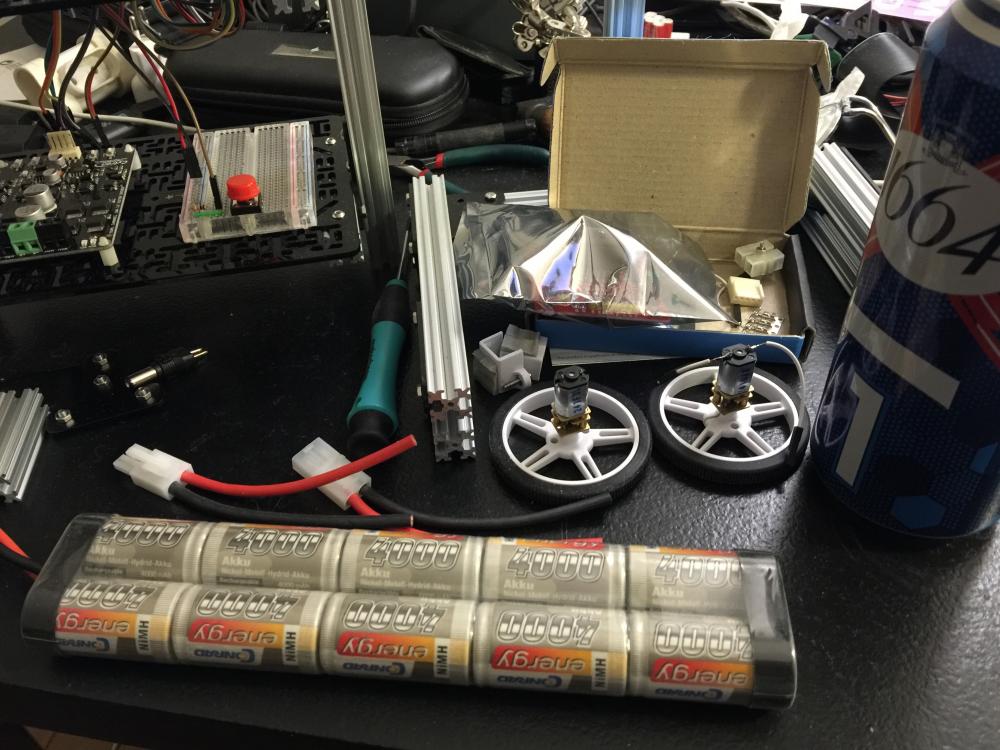
Les 2 moteurs que j'attends :
(12 V: 100 RPM and 300 mA free-run, 220 oz-in (16 kg-cm) and 5 A stall):
https://www.pololu.com/product/1106
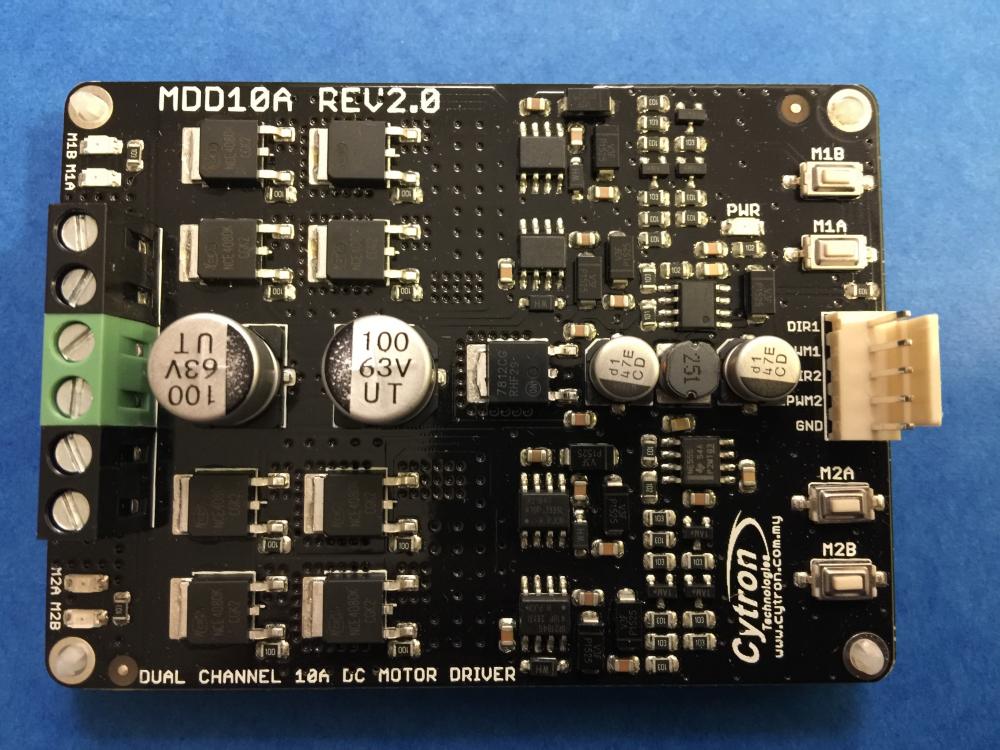
La carte qui va piloter les 2 moteurs :
(5-30V 10-30A en pic) Je n'ai pas de doutes qu'elle fonctionne bien avec les moteurs. Un avis ?
http://www.cytron.com.my/p-mdd10a
J'ai ces questions :
1. J'ai bien lu la notice du chargeur. Je ne comprend pas : la tension de charge est à 14V pour une batterie de 12V. C'est la notice qui le dit mais j'aimerai avoir votre avis.
2. Toutes les cellules NiMH ont une tension de sortie à 1,2V ?
3. Il y a des choses à savoir au sujet de ces batteries NiMH ? Manipulations ... fixations au robot ?
4. Le noob que je suis a été effrayé par la somme d'avertissements au sujet de LiPo. C'est vrai que les LiPo ont plus de patate à la décharge ? Vous en pensez quoi ?
5. Les câbles de la batteries ont une section beaucoup plus large que j'attendais. Je n'ai pas trouvé d'infos sur le net à ce sujet. Des infos sur la section des câbles 12V 5-10A ?
PS. La bière est la pour montrer la taille ridicule des premiers moteurs qui bloquent à 60% PWM avec le poids du robot.
#9
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 février 2016 - 11:48
1,41V c'est environ la tension max Umax à 20°C d'une cellule NiMh ( tension Umax dépendant des cellules que tu utilises ) vu que tu as 10 cellules il est normale que la tension puisse être à environ 10* Umax soit 14,1V en pleine charge environ à 20°C ...
La tension va varier en fonction de la décharge et descendre progressivement jusqu'à Umin. En dessous de ce Umin c'est la mort de la cellule.
Les lipo ont un fonctionnement similaire au NiMh mais les tension min et max sont différentes ( entre environ 3,7V min et 4,2V max pour les lipo ) par contre les lipo possède une densité d'énergie plus importante ( rapport poids /puissance emmagasiné ) , de plus il est vrai que les lipo ont une capacité de décharge plus importante que les nimh ( capacité à fournir des ampères ) . Perso j'utilise des Nimh , des lipo et des lithium ion , chacune ont des avantages / inconvénients mais je suis pas sûr que cela t'importe vraiment pour ton projet
Concernant la section des câble c'est normal c'est pour être sur de pouvoir fournir le courant que peut débiter la batterie, mais c'est pas par ce que la batterie peut fournir ce courant que ton montage va le tirer ( sauf si tu fais un court circuit mais moins de risques d'un point de vue humain dans ce cas avec des NiMh même si il y a eu beaucoup d'amélioration sur ce point côté lipo ... )
Sinon concernant la carte cytron je ne l'ai pas utilisé personnellement mais ce qui est intéressant c'est qu'elle peut être utilisé aussi bien en mode "magnitude " ( mode standard, et en mode locked antiphase , tu devrais faire des tests dans les deux modes mais mon expérience ( sur un autre applicatif qu'un "balancing robot" ) me souffle que le mode locked antiphase peut être intéressant pour ton appli ( je te laisse creuser un peu sur le sujet ) Mais c'est à vérifier bien entendu car je n'en suis pas sûr;
Pour les moteurs ils seront bon pour un poids donné et une taille de roue donnée.
Bonne continuation sur ton projet
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 12 février 2016 - 08:37
Merci pour ces infos
Je comprend que mes 10 cellules en série sortent 10x1,41V. Soit 14,1V.
Pourquoi le vendeur annonce 12V sur le papier ? C'est une moyenne ? Je veux comprendre ^^
J'ai lu aussi que je ne devais pas appliquer sur les moteurs qui sont à 12V une tension supérieur. Ces 2 petits volts de différence, c'est un montage courant (12V alimenté en 14V) ? Je ne me rend pas compte.
Je vais surveiller cette tension min. C'est fiable ces petits voltmètres ?
http://www.amazon.fr/gp/product/B00AW4DFVU?psc=1&redirect=true&ref_=oh_aui_detailpage_o01_s00

PS. Et pardon pour le terme "patate" pas clair Je parlais bien de courant de sortie max. Merci !!
#11
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 février 2016 - 09:34
Oui sur le principe ces petits machin sont fiable ( à condition que le fournisseur soit correcte ) Personnellement j'en utilise pour monitorer mes tension de batterie etc ...
Ensuite, sur tes batteries c'est indiqué 12V car 12V est une valeur " commune " et qui est entre le min et le max que doit fournir ta batterie en fonction de sont cycle.
Le batterie au plomb 12V c'est environ entre 13,7 et 10,8 ...
Les NimH 12V c'est environ entre 14V et 11V
les Lipo 3S "12V" c'est environ entre 12,6V et 11,1V
etc ...
( tout ces chiffres sont donné avec des pincettes, à vérifier exactement mais l'ordre d'iée est là )
En gros c'est plus simple pour le marketing de dire 12V que de donner deux valeurs, sinon la majorité des gens seraient perdu.
autre exemple
Les piles non rechargeable c'est environ entre 1,6V et 1,2V
alors que les piles rechargeble c'est en génaral entre 1,3V et 1V
mais toutes les deux sont indiqué " 1.5V "
@+
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#13
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 16 février 2016 - 08:57
J'ai fini le montage ce weekend. Équilibrage des poids ... des heures avec un fil à plomb et un niveau ... Elles sont super lourdes les batteries ... à 12V Et avec les nouveaux moteurs, plus de pb de couple.
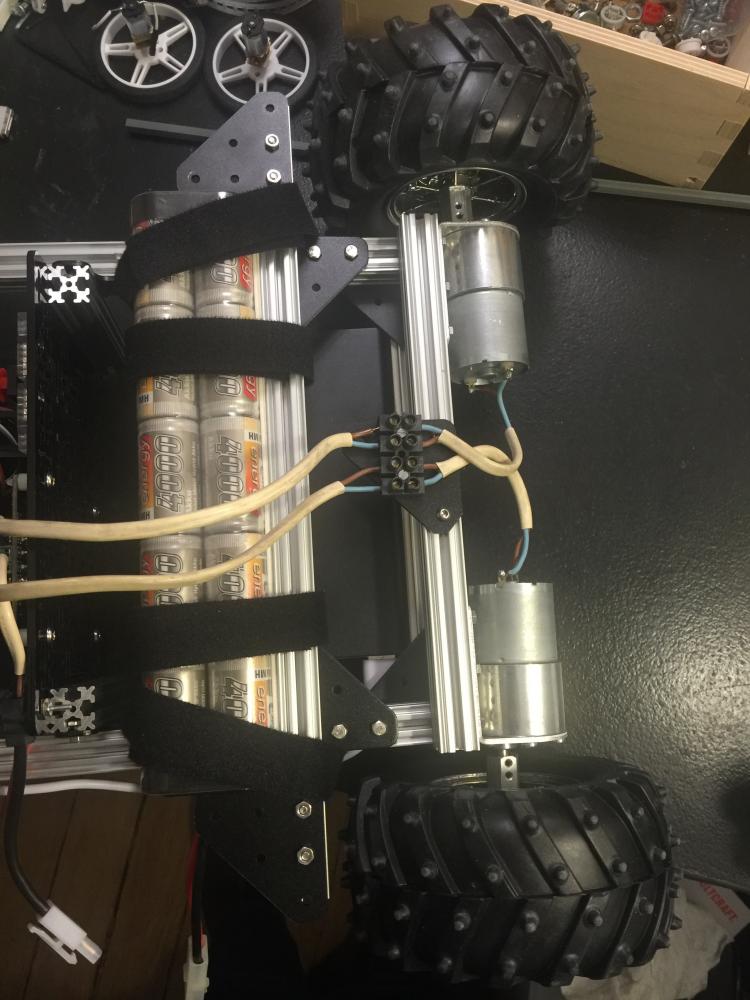
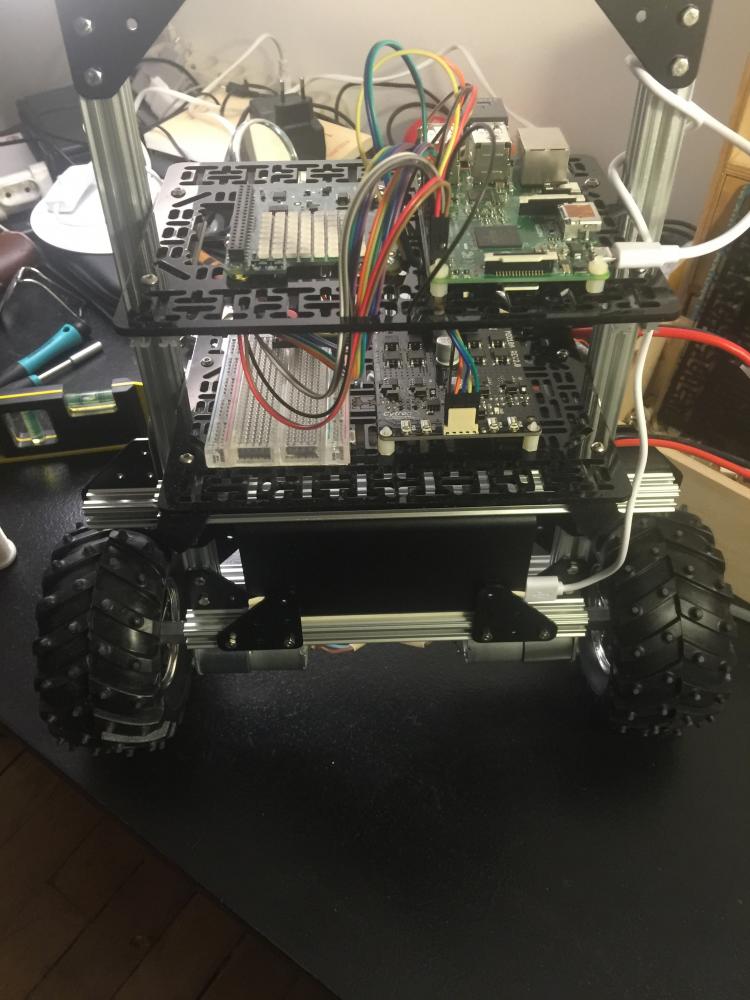
Depuis, je cherche juste à stabiliser la station debout. je m'amuse avec les variables PID. La meilleure combinaison que j'ai donne ceci :
Il semble se tenir tout seul mais au bout de quelque secondes, il avance, se rétabli puis recommence ... C'est assez aléatoire, ce n'est pas encore parfait !!
Je ne sais pas si c'est une erreur mais je fais aussi varier la fréquence (d'ailleurs, on l'entend "chanter" ^^).
J'utilise le contrôleur en mode "Sign-Magnitude PWM" : un pin pour la direction et un autre en pwm pour la vitesse.
J'ai remarqué que la fréquence de la sortie PWM joue aussi sur la vitesse des moteurs. À moins de 10Hz, le moteur avance par saccades. À 50Hz et un % PWM faible (1 ou 2%), il n'y a plus de saccades et j'ai la vitesse la plus faible. A 20kHz (la freq max de la carte) et le même % PWM, les moteurs avancent trop vite pour contrôler les plus petites inclinaisons. Donc, pour un calcul du PWM entre 0 et 100%, je fait varier la fréquence en proportions de 50 à 20kHz.
Bref, je fais varier la fréquence avec le % PWM. Je n'ai pas fini de tester des combinaisons P, I, D, fréquence.
#14
-

- Membres
-
- 4â¯747 messages
Webmaster
- Gender:Male
- Location:Rhône Alpes
Posté 16 février 2016 - 09:31
J'ai fini le montage ce weekend.
Je sens que tu vas pouvoir nous le publier sur le Robotscope celui là
http://www.robot-maker.com/robotscope/
#16
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 février 2016 - 01:29
J'ai fini le montage ce weekend. Équilibrage des poids ... des heures avec un fil à plomb et un niveau ... Elles sont super lourdes les batteries ... à 12V
Depuis, je cherche juste à stabiliser la station debout. je m'amuse avec les variables PID. La meilleure combinaison que j'ai donne ceci :
Il semble se tenir tout seul mais au bout de quelque secondes, il avance, se rétabli puis recommence ... C'est assez aléatoire, ce n'est pas encore parfait !!

C'est déjà un excéllent début
J'utilise le contrôleur en mode "Sign-Magnitude PWM" : un pin pour la direction et un autre en pwm pour la vitesse.
J'ai remarqué que la fréquence de la sortie PWM joue aussi sur la vitesse des moteurs. À moins de 10Hz, le moteur avance par saccades. À 50Hz et un % PWM faible (1 ou 2%), il n'y a plus de saccades et j'ai la vitesse la plus faible. A 20kHz (la freq max de la carte) et le même % PWM, les moteurs avancent trop vite pour contrôler les plus petites inclinaisons. Donc, pour un calcul du PWM entre 0 et 100%, je fait varier la fréquence en proportions de 50 à 20kHz.
Bref, je fais varier la fréquence avec le % PWM. Je n'ai pas fini de tester des combinaisons P, I, D, fréquence.
Je n'ai pas trouvé de posts parlant de faire varier la fréquence. C'est normal docteur ?
Très intéressant ... ça m'étonne même ... tu peux essayer de faire une vidéo du robot les roues en l'air avec un même PWM mais une fréquence différentes ?
Peux tu qualifier à "quelle fréquence " tu actualise ta boucle d'asservissement ? Mon petit doigts me souffle que c'est plutôt lié à ça... ( à vérifier car mon petit doigts n'a pas toujours raison. )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#17
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 17 février 2016 - 08:43
La boucle d'asservissement, est très peu différente de celle donnée plus haut.
Je pause la boucle à une milliseconde.
time.sleep(.001)
Mais je ne vois pas en quoi cela joue. Je laisse le raspberry gérer le pin pwm. Je ne génère pas le signal carré avec mon soft.
Et tiens, pour le fun :
duty = 2 freq = 50 moveForwardMotorA(duty, freq) moveForwardMotorB(duty, freq) time.sleep(3) moveBackwardMotorA(duty, freq) moveBackwardMotorB(duty, freq) time.sleep(3) # Je laisse le B à 50 Hz # pendant que le A varie de 50 à 20k par pas de 100 # Le duty reste à 2 for freq in range(50, 20000, 100): moveBackwardMotorA(duty, freq) time.sleep(.1) clean()
Ce n'est pas ce que tu attendais ?
#18
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 18 février 2016 - 05:55
Alors la vidéo c'est exactement ce que je voulais voir pour " observer ton cas" et oui ça m'étonne grandement... ça me perturbe même... j'ai l'impression d'avoir rater un détail important... qu'il y a quelque chose qui m'échappe...
Tu peux essayer le même genre de test mais en gardant une fréquence fixe et en faisant varier le PWM sur une des roues et pas l'autre ?
Tu as un oscillo chez toi ?La seule explication que j'ai pour le moment c'est que ton time.sleep(x) serait ce qui cause le problème...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#19
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 18 février 2016 - 08:34
J'avoue que ça m'a surpris aussi puisque ce n'est pas documenté.
Si je conserve une fréquence fixe et que je fait varier le PWM, le comportement est celui documenté. Et j'obtiendrai la même vidéo.
C'est peut-être la carte contrôleur qui a un comportement inattendu. Quoi qu'il en soit,
- si je veux la vitesse max pour mes moteurs, je dois placer la freq au max et duty à 100. Mais à cette fréquence je n'ai pas la vitesse la plus basse, même avec un petit PWM.
- Si je veux la vitesse la plus faible, je dois baisser la fréquence et le PWM. Mais je n'ai plus accès à la vitesse la plus grande sans re-changer la fréquence.
Et non désolé, pas d'oscilo
#20
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 18 février 2016 - 10:03
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Raspberry PI 2B, Arduino UNO, PID, OpenBeam, USB, equilibre, balancing
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Arduino Uno v4 WifiDébuté par FrancoisA, 30 juin 2023 |
|

|
||
Sujets généraux →
Electronique →
Comment la sortie PID contrôle-t-elle le relais statique ?Débuté par marcus , 15 sept. 2021 |
|

|
||
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
PROJET ROBOT GD ONEDébuté par GD ONE, 28 juil. 2019 |
|
|
||
Sujets généraux →
Programmation →
Aide pour asservissement PID d'un robot 2WD sur DSPICDébuté par foud, 28 mai 2019 |
|
|
||
Sujets généraux →
Programmation →
Arduino due, Moteurs CC et asservissement PIDDébuté par Mike118, 18 mars 2019 |
|

|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

