Bonjour,
Le code 2 et 3 ne fonctionnent plus après modification
Voici la librairie que j'ai utilisé ci-joint en .zip
Bonne journée et merci
Fichier(s) joint(s)
-
 TMC26XStepper Libraries.zip 18,56 Ko
115 téléchargement(s)
TMC26XStepper Libraries.zip 18,56 Ko
115 téléchargement(s)
Il y a 7 élément(s) pour Clément13 (recherche limitée depuis 04-mai 13)
 Posté par
sur 17 juin 2021 - 02:55
dans
Mécanique
Posté par
sur 17 juin 2021 - 02:55
dans
Mécanique
Bonjour,
Le code 2 et 3 ne fonctionnent plus après modification
Voici la librairie que j'ai utilisé ci-joint en .zip
Bonne journée et merci
TMC26XStepper Libraries.zip 18,56 Ko
115 téléchargement(s)
Posté par
sur 15 juin 2021 - 10:32
dans
Mécanique
Le premier code compile et permet au moteur de faire un tour.
Le deuxième en revanche ne reconnais pas la ligne "tmc26XStepper.start(); sans la rajouté spi_. Une fois rajouté la compilation se fait mais aucune action du moteur
Posté par
sur 14 juin 2021 - 02:23
dans
Mécanique
Bonjour,
Malheureusement aucun des programmes que vous m'avez transmis ne fonctionne alors que le miens oui, je ne comprends pas pourquoi
Posté par
sur 09 juin 2021 - 03:52
dans
Mécanique
Bien sur tenez :
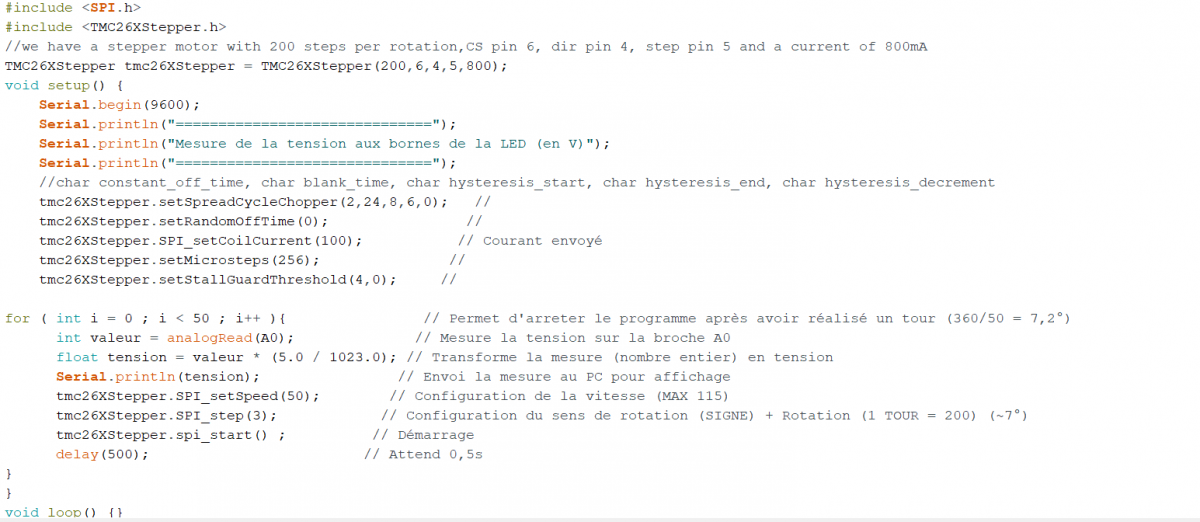
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 800mA
TMC26XStepper tmc26XStepper = TMC26XStepper(200,6,4,5,800);
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("Mesure de la tension aux bornes de la LED (en V)");
Serial.println("==============================");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0); //
tmc26XStepper.setRandomOffTime(0); //
tmc26XStepper.SPI_setCoilCurrent(100); // Courant envoyé
tmc26XStepper.setMicrosteps(1); //
tmc26XStepper.setStallGuardThreshold(4,0); //
for ( int i = 0 ; i < 50 ; i++ ){ // Permet d'arreter le programme après avoir réalisé un tour (360/50 = 7,2°)
int valeur = analogRead(A0); // Mesure la tension sur la broche A0
float tension = valeur * (5.0 / 1023.0); // Transforme la mesure (nombre entier) en tension
Serial.println(tension); // Envoi la mesure au PC pour affichage
tmc26XStepper.SPI_setSpeed(50); // Configuration de la vitesse (MAX 115)
tmc26XStepper.SPI_step(2); // Configuration du sens de rotation (SIGNE) + Rotation (1 TOUR = 200) (~7°)
tmc26XStepper.spi_start() ; // Démarrage
delay(500); // Attend 0,5s
}
}
void loop() {}
Posté par
sur 09 juin 2021 - 01:53
dans
Mécanique
Re bonjour
Malheureusement ça ne fonctionne pas :/
D'autres pistes ?
Posté par
sur 09 juin 2021 - 10:25
dans
Mécanique
Posté par
sur 09 juin 2021 - 10:12
dans
Mécanique
Bonjour à tous et toutes,
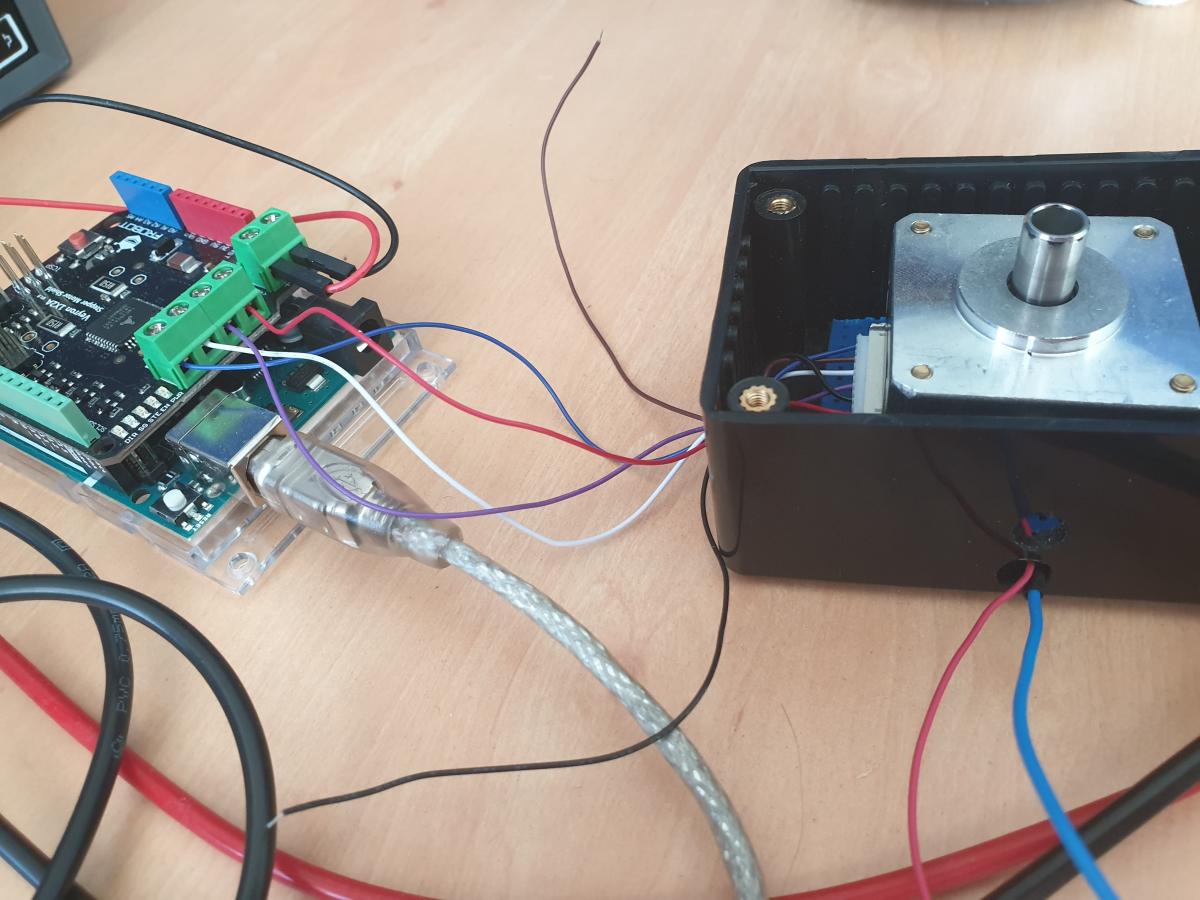
Je travaille avec le moteur pas-à-pas proposé par robotmaker à arbre creux de 6mm,
J'utilise une carte arduino Uno pour le piloter et je veux faire en sorte de le faire tourner de 1 pas sois 1,8° mais le moteur ne tourne pas même si on entend qu'il essaie.
Voici le code que j'utilise ci joint ainsi que la photo du montage.
Comme vous le voyez sur le code, je ne peux pas le faire tourner à moins de 3 pas d'un coup sois ~7,2°
Des solutions ?
Merci d'avance