Différents tests pour bien comprendre ce qui se passe :
1)
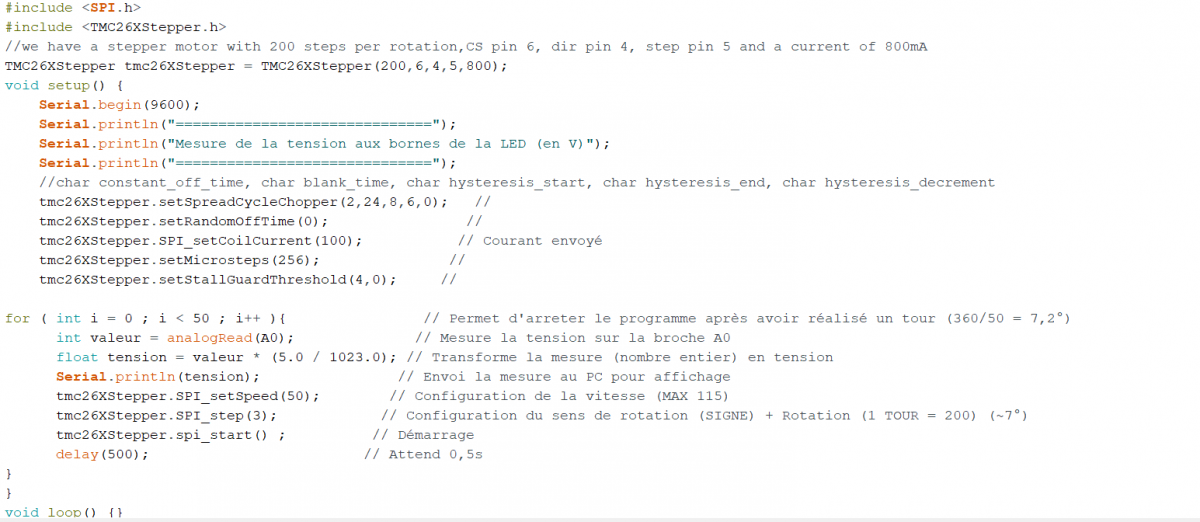
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 800mA
TMC26XStepper tmc26XStepper = TMC26XStepper(200,6,4,5,800);
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("Mesure de la tension aux bornes de la LED (en V)");
Serial.println("==============================");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0); //
tmc26XStepper.setRandomOffTime(0); //
tmc26XStepper.setMicrosteps(1); //
tmc26XStepper.setStallGuardThreshold(4,0); //
tmc26XStepper.SPI_setSpeed(50); // Configuration de la vitesse (MAX 115)
tmc26XStepper.SPI_step(200); // Configuration du sens de rotation (SIGNE) + Rotation (1 TOUR = 200) (~7°)
tmc26XStepper.spi_start() ; // Démarrage
}
}
void loop() {}
Est ce que le moteur pas à pas fait bien un tour complet ?
Si non, vérifier le câblage et décrire ce qu'il se passe .
Si oui
2)
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 800mA
TMC26XStepper tmc26XStepper = TMC26XStepper(200,6,4,5,800);
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("Mesure de la tension aux bornes de la LED (en V)");
Serial.println("==============================");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0); //
tmc26XStepper.setRandomOffTime(0); //
tmc26XStepper.setMicrosteps(1); //
tmc26XStepper.setStallGuardThreshold(4,0); //
tmc26XStepper.SPI_setSpeed(1); // Configuration de la vitesse (MAX 115)
tmc26XStepper.SPI_step(200); // faire 1 tour
tmc26XStepper.spi_start() ; // Démarrage
}
}
void loop() {}
Est ce que le moteur pas à pas fait toujours son tour complet en allant tout doucement cette fois ci?
Si non, ajuster la valeur de vitesse dans set speed jusqu'à ce que le moteur fasse un tour complet et passer à l'étape 3...
Si oui ,
3)
#include <SPI.h>
#include <TMC26XStepper.h>
//we have a stepper motor with 200 steps per rotation,CS pin 6, dir pin 4, step pin 5 and a current of 800mA
TMC26XStepper tmc26XStepper = TMC26XStepper(800,6,4,5,800);
void setup() {
Serial.begin(9600);
Serial.println("==============================");
Serial.println("Mesure de la tension aux bornes de la LED (en V)");
Serial.println("==============================");
//char constant_off_time, char blank_time, char hysteresis_start, char hysteresis_end, char hysteresis_decrement
tmc26XStepper.setSpreadCycleChopper(2,24,8,6,0); //
tmc26XStepper.setRandomOffTime(0); //
tmc26XStepper.setMicrosteps(4); //
tmc26XStepper.setStallGuardThreshold(4,0); //
tmc26XStepper.SPI_setSpeed(50); // Configuration de la vitesse (MAX 115)
tmc26XStepper.SPI_step(800); // Configuration du sens de rotation (SIGNE) + Rotation (1 TOUR = 200) (~7°)
tmc26XStepper.spi_start() ; // Démarrage
}
}
void loop() {}
Est ce que le moteur fait toujours un tour complet ?
Si oui est ce qu'il va à la même vitesse qu'avant ?
ça sera déjà pas mal comme tests à faire =)