toujours d'actualité 
Contenu de roboner
Il y a 33 élément(s) pour roboner (recherche limitée depuis 22-mai 13)
Par type de contenu
Voir pour ce membre
#95566 Vends robot humanoïde + matériels
 Posté par
sur 20 mai 2018 - 08:34
dans
Reventes, matériel d'occasion, récup
Posté par
sur 20 mai 2018 - 08:34
dans
Reventes, matériel d'occasion, récup
#94981 Vends robot humanoïde + matériels
Posté par
sur 29 avril 2018 - 01:50
dans
Reventes, matériel d'occasion, récup
Bonjour,
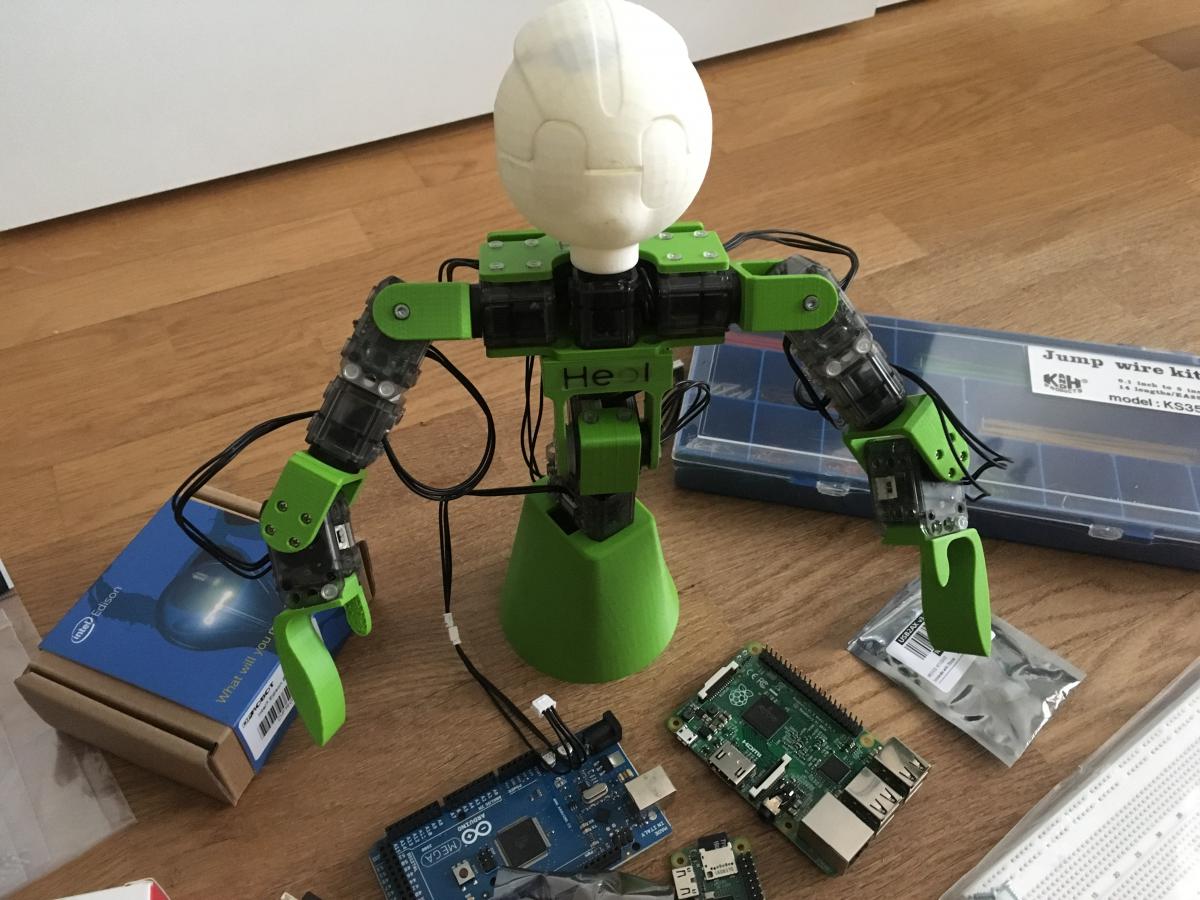
Je vends tout mon matériel électronique et mécanique qui m’a servi à faire de la robotique. Il m’a notamment servi à concevoir le robot humanoïde heol Cf ce topic : http://www.robot-maker.com/forum/topic/9947-fendi-mini-robot-humanoide/ :
Robot semi-humanoïde composé de 11 XL320 en parfait état de fonctionnement + pièces imprimées en 3D + USB2AX (Neuf) + Rasberry Pi Zero + batterie lithium (7.4v, 2200mAh) + vis + rivet (neuf) : Prix = 175€ -> neuf = 300€
Une Raspberry Pi 2 Model B : Prix = 10€
Raspberry Pi 3 Model B Quad Core CPU 1.2 GHz 1 Go RAM neuve : Prix = 20€ -> neuf = 37€
Une Intel Edison neuve (https://www.seeedstu...Kit-p-2151.html) : Prix + 20€ -> neuf = 75€
Une Arduino mega 2560 : Prix + 15€ -> neuf = 35€
Kit de fil neuf : Prix 7€
Possible de prendre la totalité du lot pour : 220€
Je vous donne aussi les fichiers 3D pour le robot humanoïde. Je vends la partie haute du robot sur lequel j’ai travaillé, mais vous pouvez lui rajouter les jambes sans problème en rajoutant des moteurs et en imprimant les pièces 3D pour le bas. Les photos se trouvent en fichier joins
N’hésitez pas à me contacter pour plus de renseignements ou des photos supplémentaires.
Image(s) jointe(s)


#67816 Mise en place d'une boutique en ligne sur robot maker?
Posté par
sur 06 mars 2016 - 10:36
dans
Les annonces Robot Maker
Le système est très intéressant, car le forum est mis en place il y a donc une communauté qui y participe, donc il n'y aura pas trop de soucis pour avoir des "clients".
L'idée intéressante aussi que j'ai pensé plusieurs fois, c'est de permettre au membre de vendre leur robot ou leur kit, qu'en pensez-vous? De plus écrire les tutoriels et vendre les kits directement est une bonne option. Très peu de boutiques en ligne le font, ça permettrait de vous démarquer.
#66013 open pode - hexapode opensource
Posté par
sur 19 novembre 2015 - 12:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Avec quel logiciel vous concevez le robot? Car sur votre robot on ne peut pas modifier la mécanique.
#65860 Fendi, mini robot humanoide
Posté par
sur 09 novembre 2015 - 01:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour ce message, il est vrai que c'est beaucoup de travail. Cela me fait penser qu'heol peut maintenant être commandé via snap.
Voici une petite vidéo : https://www.youtube....h?v=nIRPmOKepjU
N'hésitez pas à nous suivre sur Facebook ou Twitter pour être tenu plus rapidement informé des actualités
#65689 Fendi, mini robot humanoide
Posté par
sur 01 novembre 2015 - 04:18
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Justement c'est le but, de pouvoir développer des applications pour le domaine éducatif. Car en plus du code, il y a l'apprentissage du travail en équipe avec le montage du robot. Sans oublier l’apprentissage de la CAO avec la modification de certaines pièces du robot.
#65686 Fendi, mini robot humanoide
Posté par
sur 01 novembre 2015 - 02:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui ce n'est pas facile de mettre Heol dans Vrep, je suis aidé pour ça. Une fois qu'on a la solution, c'est plus long que dur
Maintenant que tout fonctionne, je ne suis pas près de le refaire
#65669 Fendi, mini robot humanoide
Posté par
sur 31 octobre 2015 - 02:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Pour les nouvelles personnes qui lisent le sujet, la description du projet n'est pas à jour (en première page), je vous invite à venir sur le site internet, Facebook ou Twitter pour avoir toutes les informations 
Sinon, bonne nouvelle aujourd'hui, Heol fonctionne dans le simulateur Vrep. Cela veut dire qu'il n'est pas nécessaire d'avoir la plateforme "hardware" pour pouvoir coder des mouvements et s'amuser avec le robot. Tout se passe dans le simulateur. Je peux ensuite tester votre code sur le robot en réel. Il existe bien évidemment des petites différences entre le modèle réel et le simuler. De plus, le code fait pour la simulation est exactement le même que pour le modèle réel. Il est donc très facile de passer de l'un à l'autre.
Voici quelques photos du robot dans le simulateur. Une vidéo est en préparation.



#65460 choix capteur
Posté par
sur 09 octobre 2015 - 07:48
dans
Electronique
Bonne idée, mais je cherche un capteur qu'on ne touche pas
#65458 choix capteur
Posté par
sur 08 octobre 2015 - 04:34
dans
Electronique
Les dimensions ne sont pas figées. La technologie derrière le capteur n'est pas un problème. C'est quel capteur est susceptible de satisfaire mon besoin qui est :
Un capteur derrière une plaque de plastique (ABS blanc) et je viens poser ma main à 1 cm et j'aimerai que le capteur détecte cette main.
C'est pour cela qu'au départ je ne voulais pas parler de prix, car après je me débrouille à trouver le capteur qui va bien ou le bricolage qu'il faut faire. Ce qu'il me manque c'est la techno
#65456 choix capteur
Posté par
sur 08 octobre 2015 - 04:09
dans
Electronique
Le capteur devra résister à une chute de 1 mètre, d'une chute dans les escaliers...
La somme à investir c'est le moins possible, tout dépend des technologies
#65454 choix capteur
Posté par
sur 08 octobre 2015 - 03:42
dans
Electronique
Bonjour à tous,
Je suis à la recherche d'un capteur qui pourrait détecter une main à travers du plastique. Je m'explique, le capteur doit être protégé contre les chutes. Pour cela je l’enferme dans une boite plastique. Cependant j'aimerai détecter lorsqu'une personne touche cette boite pour diverses applications Je pense au capteur capacitif, mais je ne sais pas s'ils sont adaptés pour mon application et surtout les seuls que je trouve sont chers.
Avez-vous d'autres solutions?
#65424 Fendi, mini robot humanoide
Posté par
sur 04 octobre 2015 - 03:50
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Les pièces rouges qui sont mes premières pièces sont imprimées avec une ultimaker 2 et je voulais du rouge pour que ça soit plus fun. Mes nouvelles pièces sont imprimées avec Shapeways donc le blanc est moins cher. Comme c'est un proto, je ne me soucie pas trop des couleurs pour le moment
#65419 Fendi, mini robot humanoide
Posté par
sur 04 octobre 2015 - 02:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Petite nouvelle du projet, la tête a été imprimée et certains bugs ont été corrigés. Voici quelques photos, cela sera plus parlant.




Au niveau électronique un hub pour XL-320 est en cours de fabrication. La conception sous Eagle est terminée. La première version humanoïde sera donc complète et opérationnelle. Vous trouvez bien sûr toutes les sources du projet sur github.
N’hésitez pas à nous suivre sur Twitter et Facebook si ce n’est pas déjà fait
#65350 Fendi, mini robot humanoide
Posté par
sur 27 septembre 2015 - 02:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Petit bilan rapide du projet pour vous dire qu’il a changé de nom. Fendi devient Heol. La raison principale a été que nous avons été contactés par la société Fendi qui vend des vêtements de luxe et qui nous a demandé de retirer le nom. Heol signifie soleil en breton. Nous avons choisi ce nom, car nous pensons qu’il correspond bien aux valeurs du projet qui sont de redonner le sourire aux enfants, d’apporter du bonheur, d’apprendre la programmation et de jouer au foot. Et tout ça sous le soleil J
Voici donc les nouveaux liens à suivre
Le projet continue d’avancer à part ces problèmes administratifs, la tête est imprimée et est en cours de livraison, vous aurez donc bientôt de nouvelles photos
#65193 Altera cyclone III
Posté par
sur 07 septembre 2015 - 04:28
dans
Reventes, matériel d'occasion, récup
Bonjour,
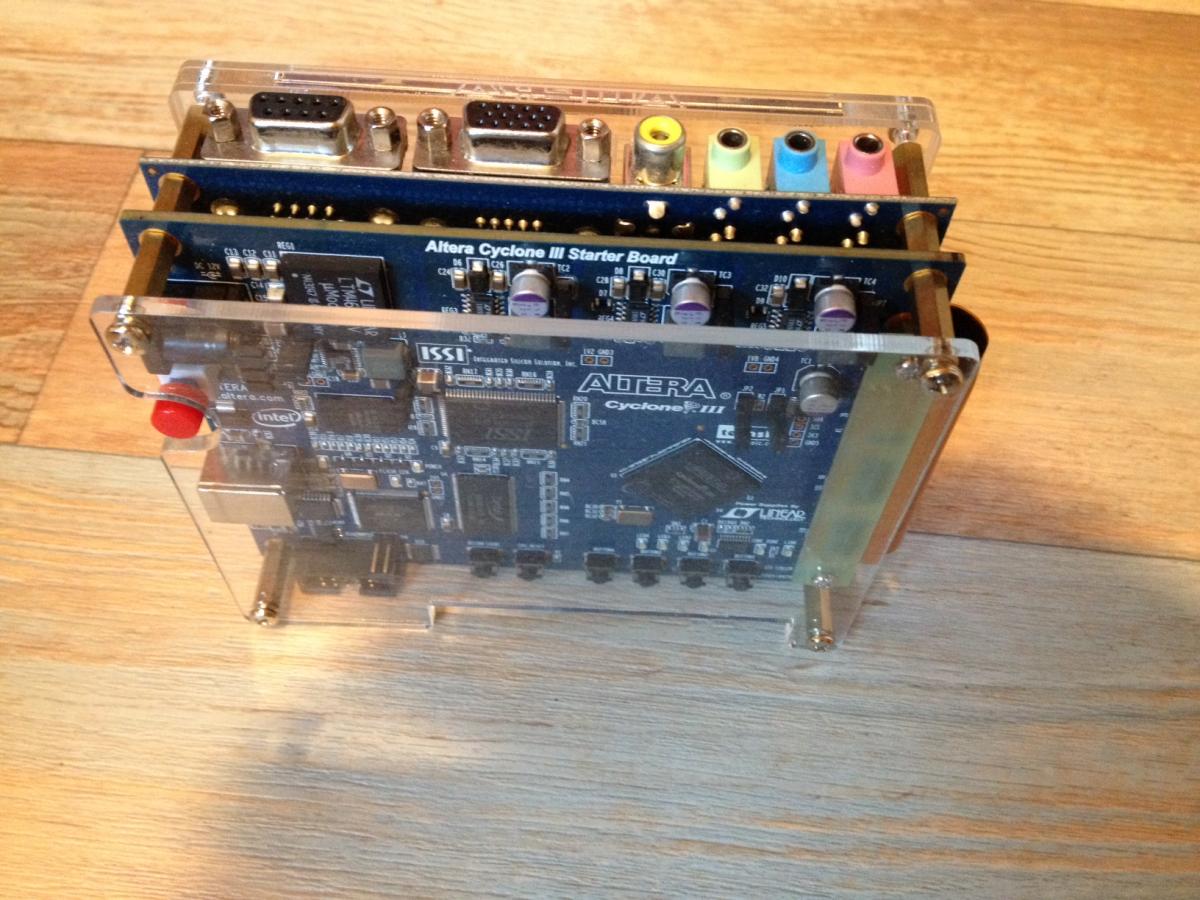
Je vends une carte Altera cyclone III de la série Nios II Embedded Evaluation Kit.
Pour plus d'information, consultez ce site web : https://www.altera.c...3-embedded.html
La carte est en parfait état et fonctionne correctement
Prix neuf 500€, prix de vente 150€
Envoi possible par la poste, à vos frais
Image(s) jointe(s)


#65192 Fendi, mini robot humanoide
Posté par
sur 06 septembre 2015 - 10:51
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je viens vous donner des nouvelles de Fendi, dû à des contres temps personnel, je n'ai pas vous présenter mes avancées.
Au niveau de l'électronique, j'ai choisi la raspberry A+, l’IMU, 2 batteries (soit un total de 2000mAh) et un hub USB. Pour le moment, je n’ai pas mis cette version en ligne car je ne suis pas satisfait du design, je le trouve moche. De plus, il faut que j’approfondisse un peu plus l’électronique avec notamment un convertisseur de tension 7.4V/5V/3.3V. Je pense finaliser cette version pour la fin de l’année, je me suis concentré ce mois-ci sur la version sans électronique, c’est-à-dire que le robot devra être en permanence branché au secteur et au PC. Cette version permettra de travailler sur le code, de faire des présentations et d’avoir un robot moins cher. Je voulais aussi avoir une sortie HDMI, pour s’affranchir du pc, je pense que c’est intéressant pour une école d’avoir Fendi en tant que mini-pc.
Voici quelques photos du torse avec l’électronique:



Clémence, notre designer qui a fait les croquis de la tête en a fini sa conception, vous pouvez voir quelques rendus :




J’ai aussi corrigé quelques bugs de pièce et j’ai mis tous les fichiers en ligne sur github. Il vous est maintenant possible de participer officiellement au projet Fendi. Le robot étant complet avec la tête. Il manque plus que le code et quelques tests d’impression et je pourrai préparer une release.
Je souhaite aussi faire un hub pour les XL-320, connaissez-vous un logiciel sympa et facile à utiliser pour faire ça, ainsi que des fabricants de carte électronique ?
#64979 Fendi, mini robot humanoide
Posté par
sur 05 août 2015 - 07:42
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Que pense tu du système de rivet avec ces moteurs ?
Heu, je ne suis pas convaincu non plus, c'est assez long à mettre. Le plus dur c'est de les enlever. Mais ça tient quand même assez bien. Je suis en train de diminuer le nombre de rivet nécessaire au montage, quitte à en remplacer par des vis. Car j'aime pas trop leur système
Sinon juste une remarque comme ça, n'oubli pas de penser aux câble de tes moteurs dans ta conception, penser en avance à une petite encoche sur tes pièces imprimée en 3D ou bien à des fixation pour les câble va être grandement appréciable lors du montage. De même en pensant à cela ça peut éventuellement t'amener à concevoir différemment une pièce.
Au départ j'avais oublié le passage de câble, je suis en train de résoudre ça avec la nouvelle version. Pour le moment le câble tienne avec de la patafix, mais ce n'est pas joli. Le problème d'un passage de câble, c'est que c'est tout de suite plus dur à imprimer
Merci de tes conseils en tout cas
#64975 Fendi, mini robot humanoide
Posté par
sur 04 août 2015 - 09:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous,
Petit up sur mon projet afin de vous donner des petites nouvelles pour ceux qui ne suivent pas encore le développement de Fendi via Twitter, Facebook ou le blog.
Le sondage pour le design de la tête de Fendi est terminé et le gagnant avec 70% des voix est :

N’hésitez pas à lire l’article sur le blog afin d’avoir plus d’information sur le résultat du design. Je remercie toutes les personnes qui ont contribué à ce sondage. Nous allons maintenant pouvoir passer à la conception de la tête
Pendant ce temps, le projet a avancé, je suis en train de développer une nouvelle version (attention elle se nomme V0.2) qui corrige et améliore certaines pièces. Elle permet aussi de diminuer le nombre de rivets nécessaire au montage du robot. Gain de temps et facilité lors du montage.


Il y a une nouveauté aussi, l’arrivée d’une version torse pour avoir seulement le haut du corps. J’ai créé une base avec bouton ON/OFF, alimentation et branchement vers le PC.

Je suis aussi en train d’insérer les batteries afin de trouver un système qui permet de les changer rapidement afin d’avoir toujours un robot autonome.


Vos avis sont les bienvenus
#64765 Fendi, mini robot humanoide
Posté par
sur 03 juillet 2015 - 11:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Je vous remercie de l'intérêt que vous portez au projet,
Au niveau de la construction du robot, je l'ai indiqué dans mon premier message, mais je refais un rappel ici. J'utilise des servo moteurs de chez Robotis, les XL320. Ils sont notamment utilisés pour le Darwin mini. Le robot est intégralement imprimé en 3D avec une ultimakers 2. Le cerveau du robot est une Intel Edison, car niveau taille/performance nous n'avons pas mieux trouvé
N'hésitez pas si vous avez d'autres questions et n’oubliez pas de prendre 2 min pour voter pour votre design préféré Sondage
#64748 Fendi, mini robot humanoide
Posté par
sur 30 juin 2015 - 10:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous,
Aujourd’hui, je viens vous présenter le petit robot humanoïde que je suis en train de développer. J’en suis pour le moment à la création de la première version. Le robot aa été nommé Fendi. Il est entièrement imprimé en 3D et est programmé en python grâce à une librairie développée par l’équipe du robot Poppy. Fendi est Open source et se voudra modulable, c’est-à-dire que modifier la taille du robot… devra être normalement facile
J’ai défini une liste d’objectifs pour le robot afin de me motiver. Voici mes objectifs à long terme.
- Le premier objectif est bien entendu de s'amuser dans la création de ce robot et d'acquérir des compétences dans le domaine de la robotique.
- Participation à la robocup (coupe du monde de football de robotique).
- Voir le robot un jour dans des hôpitaux afin de jouer avec des enfants malades et leur redonner le sourire.
J’ai aussi fait une liste d’objectifs à plus court terme
- Faire marcher le robot.
- Pouvoir se relever lors d’une chute.
- Chorégraphie pour des soirées musicales.
- Faire communiquer le robot via la parole ou les gestes.
- Se déplacer dans un environnement non connu, en autonomie.
L’originalité du projet par rapport à un autre robot de la même catégorie tel que le Darwin mini est que Fendi à un DOF (degré de liberté) en plus par jambe et je lui ai aussi rajouté une colonne vertébrale avec deux DOFs.
Voici les composants que j’ai définis pour le moment. Bien entendu, cette liste n’est pas figée dans le temps et évoluera surement
Mécanique :
- Motorisation : Dynamixel XL320.
- Squelette : Pièces imprimées en 3D.
Électronique :
- Carte mère : Intel Edison
- Capteur détection du contact au sol: Capteur FSR
- IMU
Le projet se base sur la communauté afin de m’aider à le développer d’ailleurs, j’ai besoin de vous afin de m’aider à choisir le design de la tête de Fendi. Les dessins ont été réalisés par une étudiante en design. Voici le sondage en question, il vous prendra pas plus de 2 min pour y répondre : Sondage
N'hésitez pas à le diffuser autour de vous!
Place maintenant à quelques photos pour vous montrer l’état du projet actuel :



N’hésitez pas à suivre le projet sur Twitter ou la page Facebook afin de ne perdre aucune miette du projet.
J'ai aussi un site web : http://www.fendi-project.com/
#64201 Robot Hexapode / Quadrupède
Posté par
sur 13 mars 2015 - 09:24
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Tu as raison, je devrais enlever quelque vis, car c'est long à visser et ça risque d'être ennuyeux
Je vais encore améliorer l'esthétique car toutes les pièces ne sont pas top. C'est ça l'avantage de l'impression 3D. Le plus dur n'est pas de faire des pièces esthétiques mais de faire des pièces configurables. C'est-à-dire que si je change une mesure car je veux agrandir la jambe que ça ne me pète pas toutes mes fonctions. Pareil si je mets d'autres moteurs robotis.
J'utilise Solidworks, je sais que ce n'est pas le meilleur pour de l'open source mais c'est un logiciel très efficace
#64192 Robot Hexapode / Quadrupède
Posté par
sur 12 mars 2015 - 01:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je vous remercie pour vos commentaires,
Pour le moment je n'ai pas encore imprimé les pièces, j'ai quelques modifications avant a effectué. Il est vrai que mes pièces ne sont pas optimisés pour l'impression 3D classique bien que ce soit possible, mais plus pour une imprimante double tête ou une imprimante par frittage laser. Après le but de l'impression 3D est sa facilité, mais aussi la possibilité de faire des pièces qui ont un certain design (ce que j'essaye de faire). Il est surement possible d'orienter le design pour l'impression classique, mais dans ce cas les pièces moins arrondis, moins vide...
@ashira, je me suis en effet inspiré du phantomX, le code étant opensource il y a de fortes chances que je m'inspire de ce qu'ils ont fait. Même si je pensais utiliser la Rasberry-pi 2 avec python
#64149 Robot Hexapode / Quadrupède
Posté par
sur 10 mars 2015 - 05:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Je voudrais vous présenter la mécanique d'un Quadrupède et Hexapode que je viens de finaliser. Ce robot a la particularité d'être Open-source disponible ici :
Il est entièrement motorisé avec des moteurs robotis, mais il a la particularité d'être paramétrable. J'ai donc créé des configurations pour le Quadrupède AX12-AX18 et MX 28 de même pour l'hexapode. Il est donc très facile de choisir la créature que vous voulez. De plus il est aussi possible de changer les différentes longueurs et largeurs par rapport au robot que vous souhaitez.
Pour le moment, il est imprimable en 3D et commander par une Raspberry-pi 2. Les étapes qui suivent la création de ce robot est bien entendue l'achat de tous les composants, mais aussi l'ajout d'une caméra pan-tilt, d'une batterie, les modifications suite à vos avis, mise en place dans un simulateur... De plus je souhaite créer une configuration pour les XL320 (moins onéreux au niveau moteur).
Le projet étant open-source, s'il y a des personnes intéressées pour contribuer au projet, ça sera avec plaisir.
Quadrupède:
AX12-18

MX28 :

Hexapode:
AX12-18

MX28 :

Au plaisir d'avoir vos retours
#63944 débuter un grand projet
Posté par
sur 25 février 2015 - 02:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
tu peux aussi regarder ici : http://www.reachrobotics.com/




