Posté par
Posté par
J'ai essayé de réfléchir et j'ai mis cela en commentaire sur le tuto :
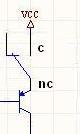
euh je voudrais pas dire de bétises mais je ne suis absolument pas d'accord avec ce schéma :
Pour moi le C (commun est en bas) le NC (normally close) est en haut à gauche et le NO (normally open) est en haut à droite,
Et donc :
Le courant circule de "C" à "NC" quand l'interrupteur ne détecte pas d'obstacle : le moteur tourne normalement et le robot avance tout droit.
NC n'est relié à rien !? Vcc n'est pas censé être sur NC (en haut à droite) et pas en haut à gauche ?
Maintenant, imaginons que l'interrupteur détecte un obstacle. (donc le courant passe entre C et NO)
Le courant circule donc de "C" à "NO" ou plutôt, il ne circule plus, puisque "NO n'est branché à aucun fil". (donc sur l'image c'est bien en haut à gauche, non ?)
Conclusion : le moteur s'arrête.
Les fils des interrupteurs seront comme dans la V1 du robot, croisés. (b'un si j'ai compris j'ai raison, sauf que dans la V1 le NO est branché sur une pile inversé pour reculer).
J'ai bon :D ? ou j'ai rien compris ?