 Posté par
Posté par
bonsoir, déjà merci de ta réponse, désolé d'avoir tardé à répondre. oui en effet je les ai relié a la masse mais ca ne fonctionnais pas. je suis allé au magasin auto du coin chercher un relais type claxon, ca a l'air de mieux aller (j'ai juste testé vite fais j'avais que 5 min lol. pour info:
- j'ai retirer tous les ponts
- relié SP et GND de l'alarme a la bobine du relais
- sur "l'interipteur" du relais relié AF et +12V du transfo
- relié -12v de la sirène a - 12v du transfo
- relié +N de la sirène a + 12v du transfo
dans ce cas l'alarme sonne 1/4 de seconde quand j'arme l'alarme au lieux d'emettre un "simple bip
alors que quand je relie le +N de la sirène au SP de l'alarme et le -12V au GND de l'alarme elle emmet bien un simple bip mais ne fonctionne pas lors du declanchement de l'alarme et quand je branche la batterie, la meme le bip d'armement ne se fait meme pas. et dans tous les cas, si la baterie n'est pas branchée le flash ne fonctionne pas. c'est vraiement pas simple (en tous cas pour moi). bonne soiree a tous



 merci pour votre aide mais ce n'est pas fini, j'ai un petit souci pour le code de l'etalonage, pour rappeler ce que la scie doit faire c'est revenir jusqu'à la fin de course au debut et positionner la scie a 1m (donc avance de 50cm dans mon cas car la fin de course est a 50cm) et le souci est que lorsque je lance l'etalonage, la scie donne un simple accoup vers l'arriere et avance de 50cm, ce n'a pas l'air d'etre un probleme de fin de course car quand je me met en position reglage et que je fait reculer la scie ca fonctionne et la fin de course aussi car quan j'appuis sur la fin de course le chariot s'arrete bien. pouvez vous m'aider s'il vous plait? sinon pour la precision du charios, j'ai une precision de 0.5mm sur 5.3m c'est pas mal je trouve. bonne soiree a tous.
merci pour votre aide mais ce n'est pas fini, j'ai un petit souci pour le code de l'etalonage, pour rappeler ce que la scie doit faire c'est revenir jusqu'à la fin de course au debut et positionner la scie a 1m (donc avance de 50cm dans mon cas car la fin de course est a 50cm) et le souci est que lorsque je lance l'etalonage, la scie donne un simple accoup vers l'arriere et avance de 50cm, ce n'a pas l'air d'etre un probleme de fin de course car quand je me met en position reglage et que je fait reculer la scie ca fonctionne et la fin de course aussi car quan j'appuis sur la fin de course le chariot s'arrete bien. pouvez vous m'aider s'il vous plait? sinon pour la precision du charios, j'ai une precision de 0.5mm sur 5.3m c'est pas mal je trouve. bonne soiree a tous.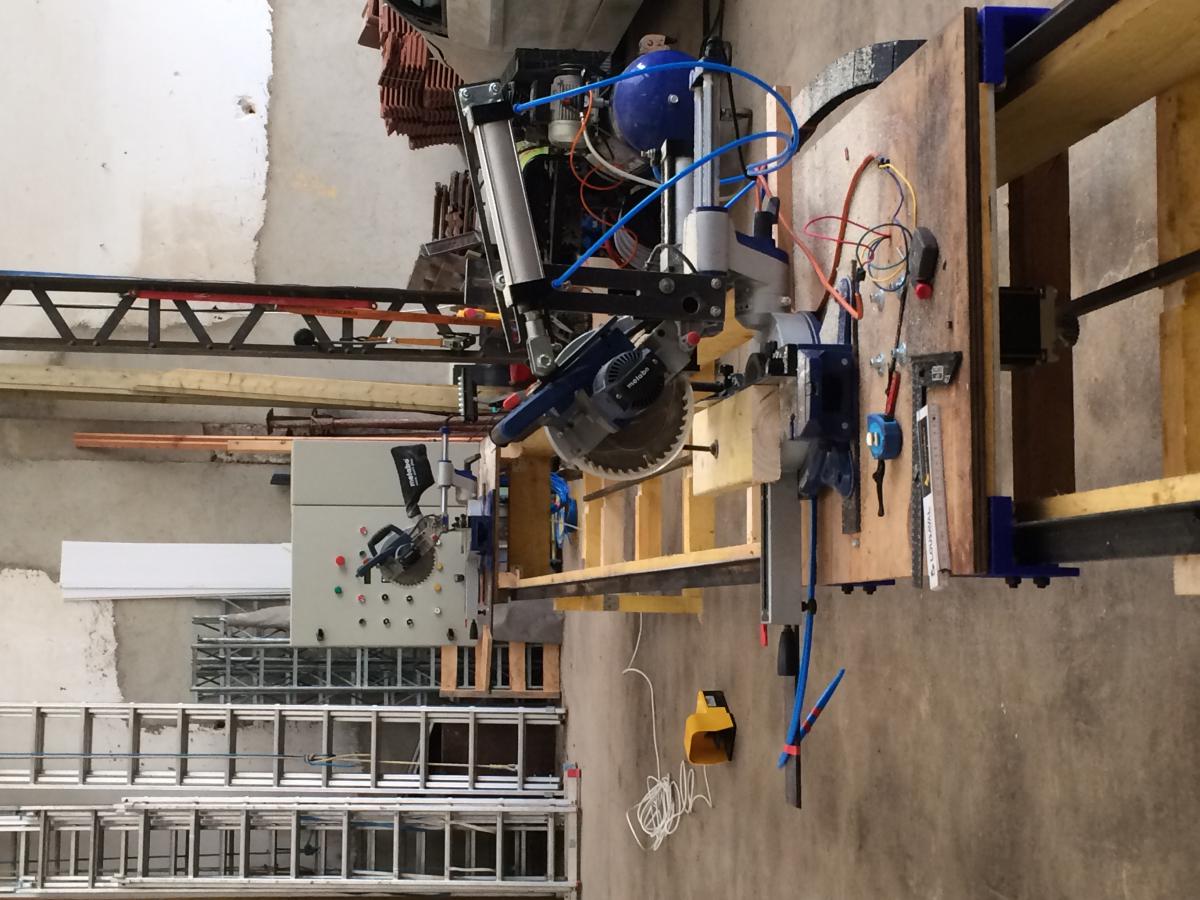



 . concernant ton code je ne sais pas ce qui ne va pas j'ai tout essayer: changer "HIGH" par LOW" remplacer "or" par "&&" ... et ca ne veut rien savoir ce ne prend pas les fin de course. dit moi si je me trompe mais l'un ou l'autre code font la meme chose non? car de toute facon la longueur enregistrée n'est pas le deplacement du moteur mais la valeur tapé sur le clavier.
. concernant ton code je ne sais pas ce qui ne va pas j'ai tout essayer: changer "HIGH" par LOW" remplacer "or" par "&&" ... et ca ne veut rien savoir ce ne prend pas les fin de course. dit moi si je me trompe mais l'un ou l'autre code font la meme chose non? car de toute facon la longueur enregistrée n'est pas le deplacement du moteur mais la valeur tapé sur le clavier.



