Mon équipe a utilisé ROS pour notre projet de fin d'études (un robot guide d'aveugle). C'était le cœur du système de navigation du robot. Il suffit d'écrire l'interface entre les capteurs, les moteurs et ROS et roule ma poule : tu as un robot capable de trouver son chemin tout seul. En pratique le plus embêtant dans notre utilisation de ROS c'était que nous n'avions pas les pré-requis (principalement pour des raisons de coût, 300 € de budget c'est peu) : notamment : nous n'avions pas de LIDAR pour exploiter les fonctions de SLAM, les roues codeuses étaient de piètre qualité et le nous utilisions un châssis de voiture RC, assez difficile à contrôler. Ça et la gestion des ressources informatiques : la Beaglebone Black que nous utilisions était régulièrement à court de ressources à allouer à nos différentes fonctions ce qui occasionnait des bugs (surtout dans le système audio pour communiquer avec l’extérieur).
Contenu de Bacab
Il y a 108 élément(s) pour Bacab (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#98893 Au bistrot du coin ...
 Posté par
sur 08 septembre 2018 - 10:43
dans
Général
Posté par
sur 08 septembre 2018 - 10:43
dans
Général
#104515 Au bistrot du coin ...
Posté par
sur 23 juillet 2019 - 12:09
dans
Général
J'en connais pas mais quand tu seras là bas hésite pas à leur parler de robot-maker! =)
J'essaye de discuter avec des responsables de fablab pour voir si on peut faire des partenariats ou autre =)vu que j'espère monter un lab aussi ...
Ok, je te tiens au jus...
#104504 Au bistrot du coin ...
Posté par
sur 22 juillet 2019 - 12:19
dans
Général
Hello !
J'ai un peu de grosse méca (perçage et découpage) à faire sur mon sous-marin et je vais devoir me rendre dans un fablab pour le faire. A 40 min. de transport y'a l'Electrolab à Nanterre où j'ai déjà mis les pieds une fois y'a 5 ans. Est-ce qu'il y a des membres de ce fablab parmi nous ?
#103403 Blabla divers
Posté par
sur 10 mai 2019 - 10:53
dans
Bric-à-brac
Question batterie, est-ce que la batterie au lithium apporte quelque chose par rapport au batterie NiMH pour des robot ?
(Je me moque du poids …)
Dans mes projets passés c'est surtout l'ampérage qui m'a conduit à utiliser des batteries LiPo plutôt que NiMH. Une LiPo peut se décharger à un rythme "plus soutenu" que la normale et fournir un ampérage plus fort (par ex. une LiPo 5000 mAh avec une caractéristique de 20C peut fournir 20*5 A au prix d'une décharge très rapide).
#103409 Blabla divers
Posté par
sur 10 mai 2019 - 12:03
dans
Bric-à-brac
Justement l'ampérage des batteries au lithium que je regardais dépasse rarement les 5Ah alors que pour les NiMh j'ai du 10Ah.
Je cherche des batteries 24V/48V en 10Ah minimum.
Tu n'as pas tout lu ou je me suis mal exprimé : dans une LiPo tu as deux caractéristiques à regarder : la capacité (en mAh) et la capacité de décharge (en C). Pour avoir l'ampérage max. d'une LiPo tu multiplies l'un par l'autre ce qui permets d'avoir des batteries qui sortent du 200A par exemple (ce que je n'ai jamais vu pour du NiMh dans un facteur de forme acceptable pour de la robotique grand publique). Par exemple mon sous-marin demande du 180 A en pleine charge, sans LiPo pas de sous-marin :/
#103421 Blabla divers
Posté par
sur 10 mai 2019 - 08:21
dans
Bric-à-brac
Forthman : je mets déjà les batteries NiMh en parallèle.
Bacab > d'où viennent tes 200A ? dans ton exemple je n'e compte que la moitié
Les deux exemples ne sont pas liés, c'est juste pour expliquer comment se calcule l'ampérage max que peut délivrer une LiPo. Il y a littéralement des centaines de combinaisons de décharge et de capacité. Par exemple celle-ci peut délivrer 30*8A=240A https://hobbyking.co...-pack-xt90.html (max. 480 A mais que pendant 10 secondes).
Voici un article qui m'a l’air pas mal foutu (j'ai lu en diagonale à TGV) sur les avantages et les spécificités des LiPo : http://www.majordome-video.com/guides/le-guide-ultime-de-la-batterie-lipo/
Après 10 A c'est pas fou comme ampérage je ne suis pas sûr qu'une LiPo soit le plus approprié.
#108741 Blabla divers
Posté par
sur 06 avril 2020 - 11:40
dans
Bric-à-brac
Que veux tu faire? y a surement une solution a ton problème.
Ça dépends, s'il espérait faire le café avec, je pense qu'effectivement c'est rappé 
#103411 Blabla divers
Posté par
sur 10 mai 2019 - 12:18
dans
Bric-à-brac
180A pour le sous marin ? Ouch !
Autant pour moi c'est pas 60A par moteur mais 40A, donc 120A au total. Après c'est le max. du max. donc tout l'électronique est conçu autour de ça. J'espère que la consommation normale sera moindre (sinon l'autonomie va en prendre un coup ! même avec le monstre de batterie qu'il y a à l'intérieur).
#115605 Little Yellow Submarine (L.Y.S.)
Posté par
sur 15 mars 2022 - 07:47
dans
Robots sous-marins bateaux et autres systèmes aquatique
Après une grosse baisse de motivation, j'ai enfin retrouvé le courage de m'y remettre.
La coque est quasiment terminée : plutôt que de faire les nombreux perçages dans la cloison arrière de la coque (l'étape à laquelle je m'étais arrêté faute d'arriver à percer avec suffisamment de précision), j'ai dessiné une pièce en 3D, imprimée en PETG.

Idem pour l'avant. Le trou sera bientôt comblé par un morceau de plexiglas transparent au travers duquel la caméra filmera.

Si vous vous souvenez bien il était prévu de faire tourner les moteurs directement dans l'eau. C'est toujours prévu comme ça pour les premiers essais mais je compte faire une mise à jour rapide vers des moteurs en "pods" étanches.
L'objectif est une première plongée en "vraie" pour le mois d'août. Premiers essais en statique dans 2 semaines dans la baignoire puis en dynamique dans la piscine d'un pote (s'il est d'accord )
#96918 Little Yellow Submarine (L.Y.S.)
Posté par
sur 30 juin 2018 - 10:34
dans
Robots sous-marins bateaux et autres systèmes aquatique
Merci pour vos compliments.
J'ignorais que Robot Maker héberge les photos. Par habitude d'autres forums je continuais d'utiliser l’hébergeur chez lequel j'ai un compte. J'y penserais pour les prochaines fois.
#104566 Little Yellow Submarine (L.Y.S.)
Posté par
sur 28 juillet 2019 - 12:03
dans
Robots sous-marins bateaux et autres systèmes aquatique
Ça à l'air complexe :
https://commons.wiki...umbered_165.png
Est-ce qu'un joint SPI ne suffit pas ? (chez 123roulements y'en a dans des tailles adaptées et pas trop cher si je veux essayer pour plus tard).
#115831 Little Yellow Submarine (L.Y.S.)
Posté par
sur 06 mai 2022 - 02:20
dans
Robots sous-marins bateaux et autres systèmes aquatique
Quelques péripéties personnelles ne m'ont pas permis de tester l'étanchéité du sous-marin, c'est donc repoussé à un futur proche. En attendant j'ai fini l'extérieur (collage d'un hublot en plexiglas sur la cloison avant) et l'intérieur : design et impression des supports pour la caméra, la Raspberry Pi, le contrôleur moteur...
Le résultat en image :

Les supports après impression et assemblage, il manquait encore les différentes barres de liaisons
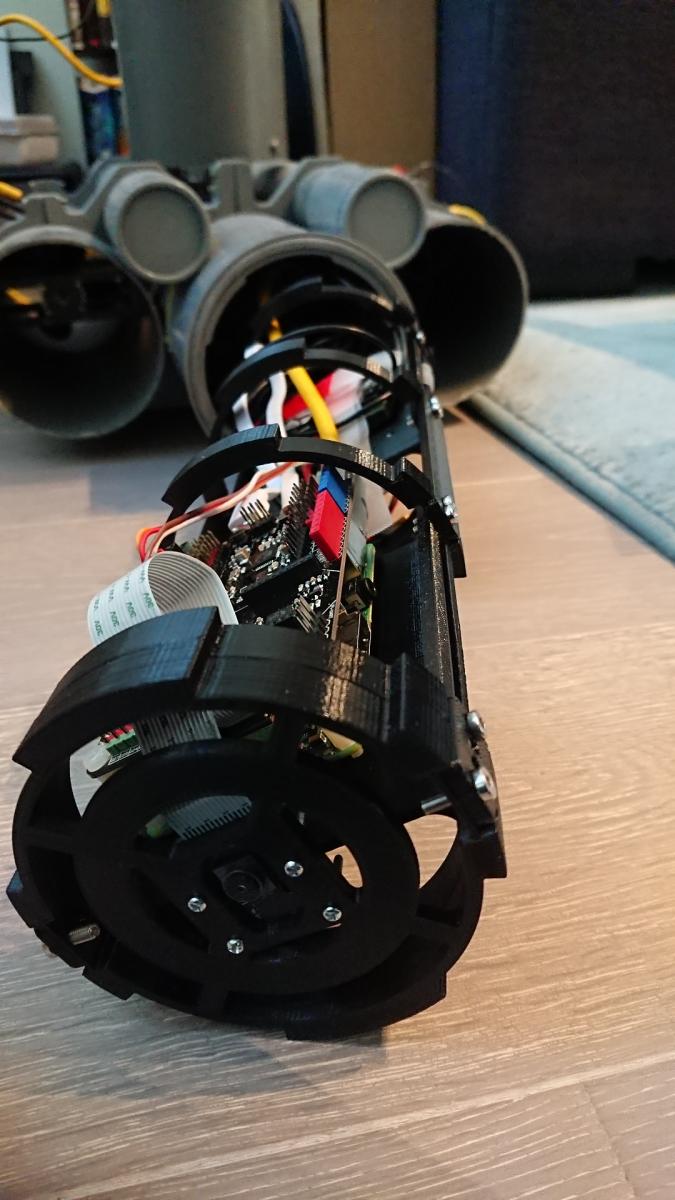
Voici l'assemblage final

Une vue d'ensemble avant les essais d'installation (pour vérifier que l'électronique ne prend pas trop de place par rapport à la batterie)

C'est bon tout ferme !
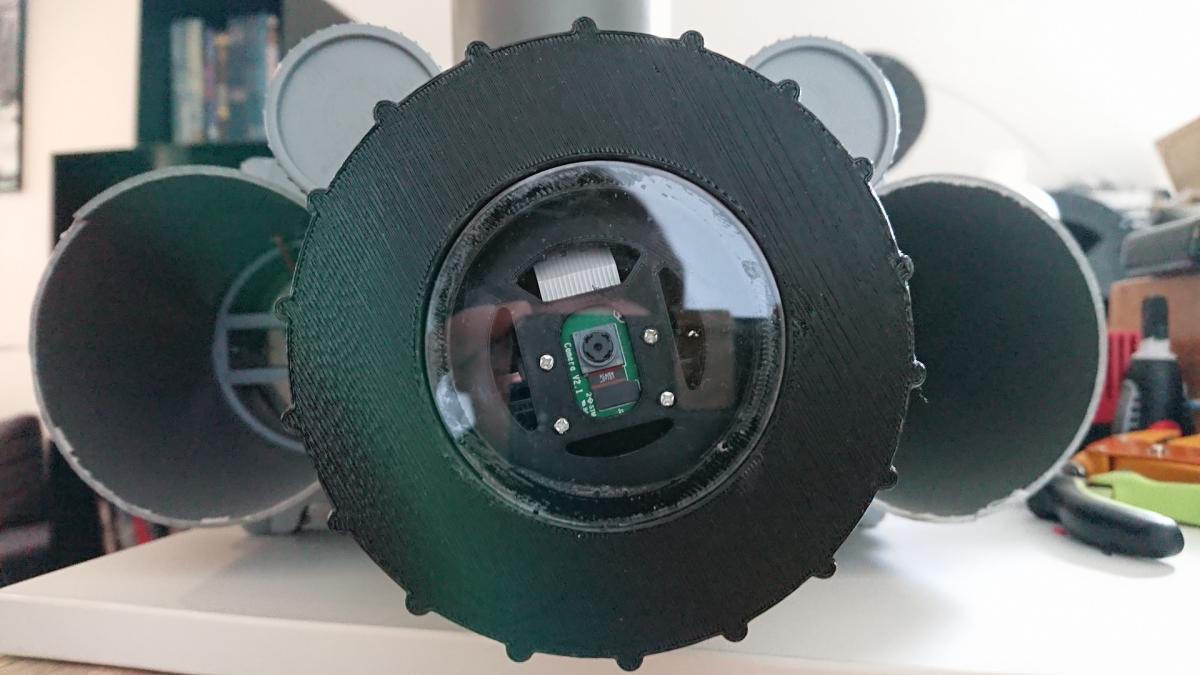
Coucou ! (c'est pas droit, je sais j'arrangerai ça plus tard)
Vu de l'arrière
Le cerveau du sous-marin est constitué d'une Raspberry Pi 3 B+ (pour assurer la liaison Ethernet avec la surface et encoder la vidéo) avec un shield Arduino (de marque DFrobot) (pour gérer les PWM à envoyer au contrôleur des moteurs et éventuellement s'interfacer avec les capteurs si j'en ajoute). Un contrôleur de moteurs pour quadcopter est connecté à une batterie LiPo 4S et assure le contrôle des moteurs (seulement 3 moteurs sont utilisés) et la fourniture d'un rail d'alimentation 5.2 V, 3A pour la Raspberry Pi. La caméra est la V2 de la caméra pour Raspberry Pi.
Maintenant que la mécanique est provisoirement terminée (en attendant les résultats des essais d'étanchéité), il faut que je m'attaque à la programmation. Encore un semaine de vacances à y consacrer, je tiens le bon bout.
#115860 Little Yellow Submarine (L.Y.S.)
Posté par
sur 11 mai 2022 - 07:18
dans
Robots sous-marins bateaux et autres systèmes aquatique
Alors que mes congés approchent de leur fin, LYS approche de la complétude. La première version du code est quasi-terminée (faut dire que y'avait pas grand chose à faire). Donc la Raspberry stream un flux vidéo de sa caméra, lisible avec VLC sur un autre ordinateur, et reçoit les commandes d'un autre PC. Les commande sont assez simple :
- 'z' pour avancer ;
- 'q' pour tourner à gauche ;
- ''d pour tourner à droite ;
- 'w' pour descendre ;
- 'a' pour remonter.
Reste à programmer l'Arduino pour qu'elle transforme les commandes Serial en PWM (facile) et à faire en sorte que la Raspberry envoie les commandes qu'elle reçoit vers l'Arduino (ce qui peut me prendre entre 30 s et 6000 ans selon l'état de la fonctionnalité, je hais la Raspberry pour toutes ces conneries d'implémentation).
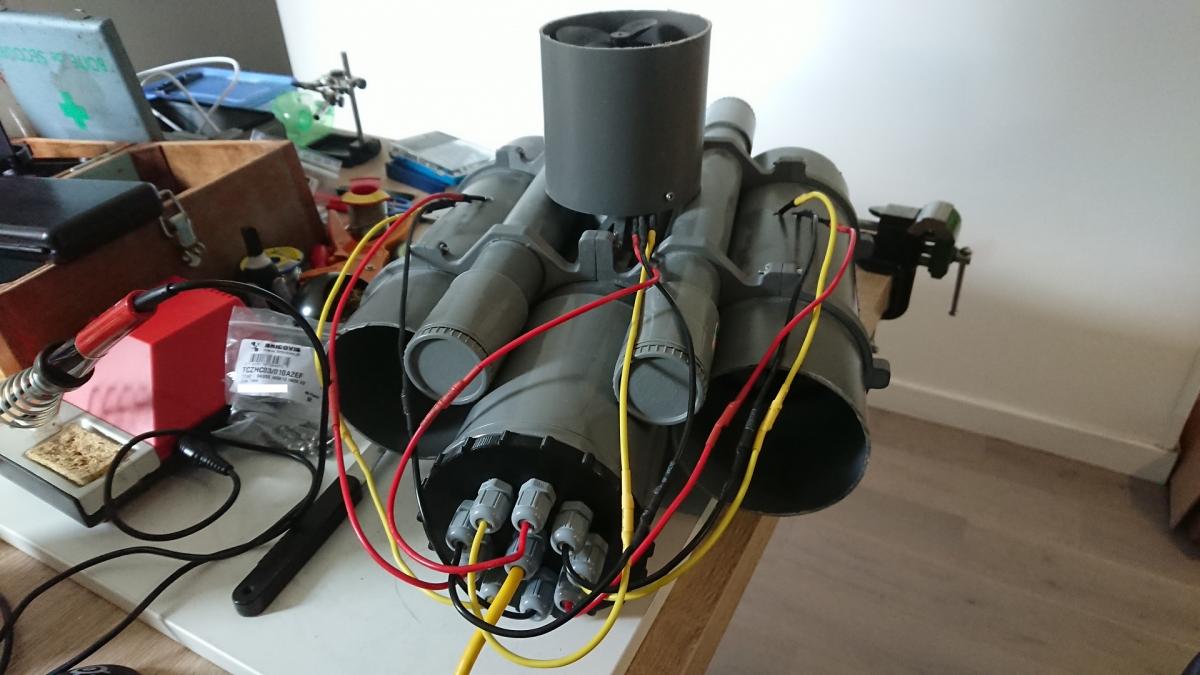
Je vous laisse avec une photo de LYS sur son banc de programmation au pied de mon bureau.

#116701 Little Yellow Submarine (L.Y.S.)
Posté par
sur 18 septembre 2022 - 10:06
dans
Robots sous-marins bateaux et autres systèmes aquatique
Pour ceux que ça intéresserait : quelqu'un s'est lancé dans "presque" le même projet (mais avance beaucoup plus vite) sur Thingiverse :
https://www.thingive...m/thing:2934890
Et moi pendant ce temps la je cherche comment assurer l'étanchéité...
#115887 Little Yellow Submarine (L.Y.S.)
Posté par
sur 15 mai 2022 - 05:40
dans
Robots sous-marins bateaux et autres systèmes aquatique
J'ai fait les essais d'étanchéité ce week-end et j'ai trouvé au moins 3 endroits où ça fuit :
- la jonction entre le hublot et le bouchon sur lequel il est monté;
- le joint du bouchon sur lequel est monté le hublot à l'avant;
- le joint du bouchon d'un des petits tuyaux (prévus pour contenir du lest).
Pour essayer de régler le problème je vais remplacer les joints des bouchons par des plus épais et je vais chercher un truc pour étanchéifier le hublot. La bonne nouvelle c'est qu'il n'y a aucune fuite au niveau des passages de câbles
#104562 Little Yellow Submarine (L.Y.S.)
Posté par
sur 28 juillet 2019 - 10:33
dans
Robots sous-marins bateaux et autres systèmes aquatique
pour un brushless, être immergé comporte deux risques
- corrosion des connexions
- grippage des roulements à billes
avec les bons matériaux on peut donc y arriver très facilement.
Pour moi la solution avec des aimants est bien trop complexe
- peu d'efforts de transmission, ou frottements importants
- grippage toujours possible dans les paliers en contact avec l'eau
Un joint tournant c'est quelque chose qui se maîtrise très bien

Pour le joint tournant (même si ce n'est pas la solution retenue je suis curieux) est-ce que tu pourrais m'expliquer comment ça s'installe ? (les tutos que je trouve sont pour boîte de vitesse ou remplacement de pièce spécifique pour véritable bateau)
#104560 Little Yellow Submarine (L.Y.S.)
Posté par
sur 28 juillet 2019 - 08:51
dans
Robots sous-marins bateaux et autres systèmes aquatique
Je pense que cela doit dépendre de l'épaisseur de la vitre.
En fait, il s'agit ici de faire un moteur électrique avec un stator et un rotor de part et d'autre d'une vitre.
Les électroaimants dans le milieu sec, et les aimants dans l'eau.
Ça pourrait valoir le coup d'essayer avec un brushless outrunner pour voir si ça marche (mais pour le prochain, pour celui la je mets les pieds dans le plat, ou plutôt, les moteurs dans l'eau !).
#98079 Little Yellow Submarine (L.Y.S.)
Posté par
sur 02 août 2018 - 12:00
dans
Robots sous-marins bateaux et autres systèmes aquatique
Alors je viens de tester l'eau et le PLA...
J'ai fait une petite boite, et comme je l'ai poncée avec un solvant, j'ai voulu la rincer à l'eau, et comme le solvant m'a fait quelques marques blanches
je me suis dit "de l'eau chaude et c'est bon"...
ERREUR !
Ma boite ronde qui faisait 60mm de diamètre extérieur et 50mm de diamètre intérieur a perdu plus de 2mm !
Donc éviter l'eau chaude (70° environ)
Ça va le réchauffement climatique n'a pas encore atteint ces températures !
Dans le pire des cas toutes les pièces que j'ai imprimées devront être refaite dans un matériaux plus résistant. Je serai alors dans l'obligation d'avoir recours à un service d'impression car je me refuse à imprimer autre chose que du PLA dans mon 2 pièces mal ventilé. Ce sera pas la fin du monde.
#98200 Little Yellow Submarine (L.Y.S.)
Posté par
sur 05 août 2018 - 03:18
dans
Robots sous-marins bateaux et autres systèmes aquatique
Je suis plutôt du genre prudent. En théorie le moteur qui équipe mon sous-marin peux fournir un couple de 0,5 N/m à 3100 RPM et les hélices que j'ai conçues sont faites pour ces caractéristiques.
Comme le moteur à une vitesse maximum de 11000 RPM ce serait mieux d'avoir un réducteur au lieu de faire tourner le moteur au ralenti. Dans un premier temps je ferai sans mais comme j'ai du temps en ce moment j'ai conçu un réducteur étanche 3:1 que je monterais peut être.
#98209 Little Yellow Submarine (L.Y.S.)
Posté par
sur 05 août 2018 - 08:08
dans
Robots sous-marins bateaux et autres systèmes aquatique
#96914 Little Yellow Submarine (L.Y.S.)
Posté par
sur 30 juin 2018 - 09:33
dans
Robots sous-marins bateaux et autres systèmes aquatique
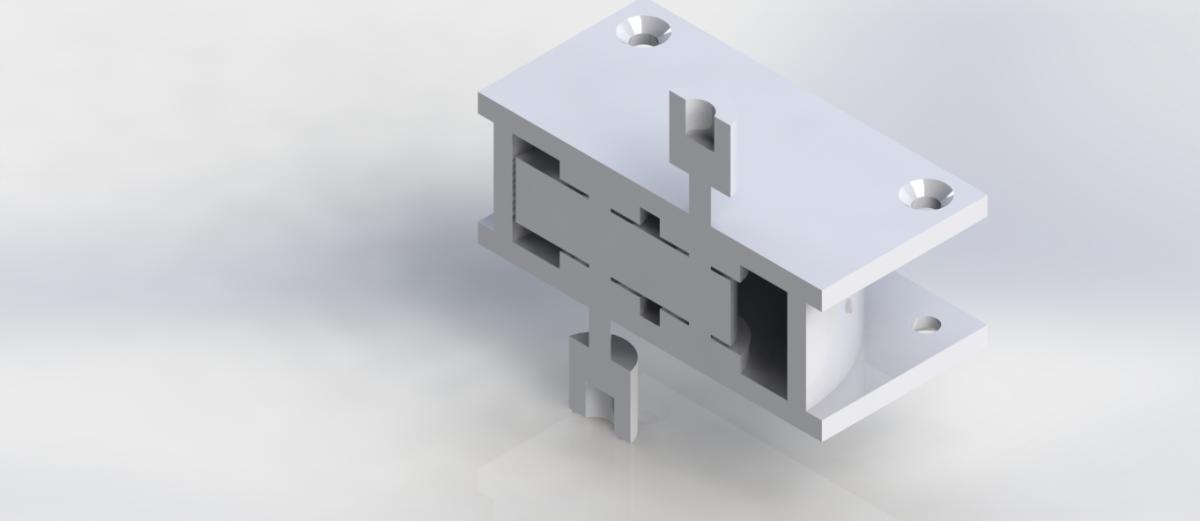
Quelques nouvelles car ce week-end je n'ai pas chômé (enfin c'est surtout mon imprimante qui a travaillé !). Comme je le disais plus tôt ici je n'étais pas satisfait de la fixation des moteurs. Après plusieurs design et quelques heures de réflexions (ajouté à quelques heures d'impressions et quelques jours/semaines d'attentes pour recevoir les pièces) j'ai finalement assemblé aujourd'hui mes nouvelles fixations pour les propulseurs et tout s'assemble très bien !
Le problème était que la pièce était tenue par deux vis dans le tuyaux et que, même serrées à fond, elles laissaient une liberté de rotation au moteur en lacet qui permettait à l'hélice de venir taper contre les bords de la tuyère. Inacceptable donc.
J'ai donc ajouté deux trous dans l'alignement de ceux existants pour contrer cela ! Las cela n'a pas marché (la pièce est visible ci-dessous).

En effet le plastique était trop souple et l'hélice pouvait encore venir taper contre le bord de la tuyère.
Je me suis donc résigné à concevoir une cage qui viendrait fixer le moteur à sa base et le long de son axe et qui remplirait tout le diamètre du tuyau pour éviter tout jeu (accessoirement, ayant déjà percé les tuyaux, cette nouvelle pièce devait utiliser les mêmes fixations).
Et voila le résultat :

Le roulement à billes est doté de deux joints étanches donc j'espère que cela ira.
#98057 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 août 2018 - 02:03
dans
Robots sous-marins bateaux et autres systèmes aquatique
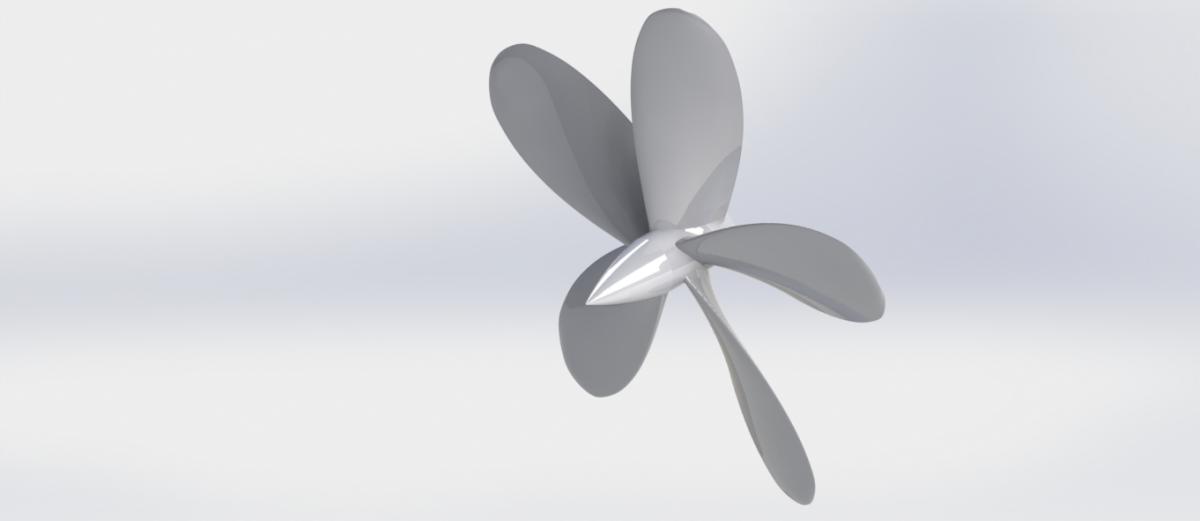
Comme beaucoup je suis en congés loin de chez moi au mois d'aout. Mais cela ne m’empêche pas de travailler un peu sur le sous-marin ! En ce moment je réalise avec Solidworks différent types d'hélices pour remplacer celles que j'ai achetées dans le commerce et qui sont difficiles à trouver.
Voici l'une des hélices que je testerai bientôt :
Hélice plutôt adapté aux grandes vitesses, je n'en attends pas grand chose :
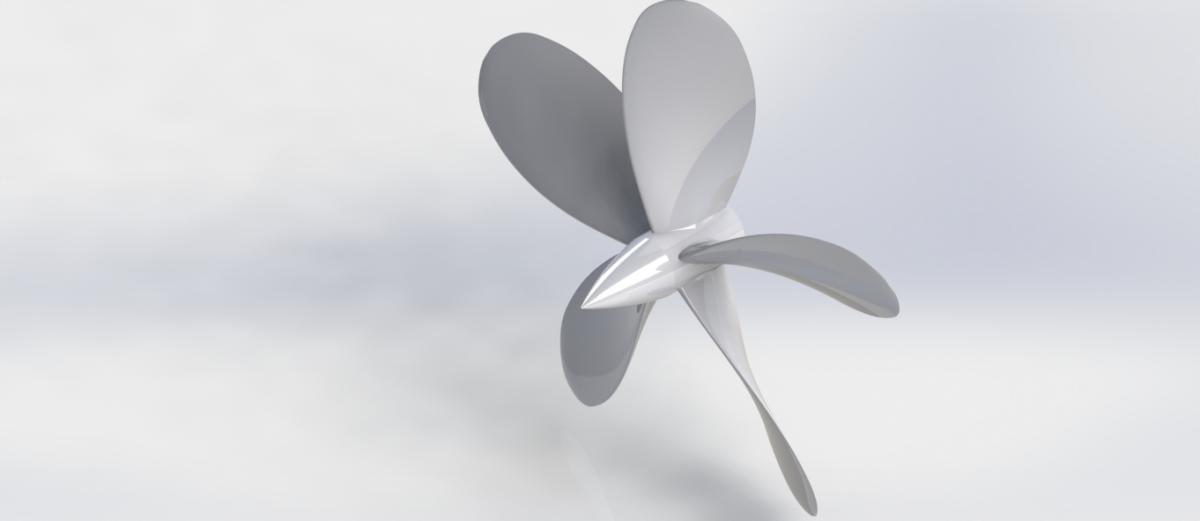
Hélice plutôt adaptée aux petites vitesses, je pense que les tests la donneront gagnantes :
#96933 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 juillet 2018 - 09:03
dans
Robots sous-marins bateaux et autres systèmes aquatique
J'utilise du PLA. Je me doutais bien que ça ne serait pas étanche donc je n'utilise pas les pièces imprimées pour l'étanchéité. En revanche je n'ai pas prévu que les pièces gonflent... Ça me gonfle.
Est ce quelqu'un sait si il est possible de traiter les pièces pour éviter qu'elles ne gonflent ?
#96936 Little Yellow Submarine (L.Y.S.)
Posté par
sur 01 juillet 2018 - 10:37
dans
Robots sous-marins bateaux et autres systèmes aquatique
A la lumière de ces nouveaux éléments je vais faire quelques expériences :

#98221 Little Yellow Submarine (L.Y.S.)
Posté par
sur 06 août 2018 - 10:08
dans
Robots sous-marins bateaux et autres systèmes aquatique
plutôt que de fabriquer un réducteur, le mieux serait de faire plusieurs hélices et de voir celle qui marche le mieux tout en consommant le moins d'intensité
Oui c'est un peu ce que je disais dans mon post sur les hélices (ben alors on ne lit pas toute ma prose !  )
)
J'en ai conçu une (non illustrée) pour la vitesse de 11000 RPM mais elle n'est pas très efficace (30 N de poussée à 11000 RPM en statique contre 60 N à 3100 RPM pour les deux hélices que j'ai montrées). La différence provient de la taille de l'hélice : à 11000 RPM il est conseillé de ne pas dépasser 4,5 cm de diamètre, contre 9 cm à 3100 RPM.
Pour les curieux j'utilise le code Matlab d'Openprop pour concevoir les hélices. C'est bien, surtout, pour un ignorant complet comme moi dans le domaine de l'hydrodynamique. La méthode de simulation qu'il utilise surestime un peu la poussée de l'hélice et sous-estime le couple généré par frottement donc je garde une marge sur la puissance totale (~10 %).
Tu as par ailleurs parfaitement raison au sujet du réducteur. C'est la pire solution qui soit... et en même temps je déteste rester passif devant un problème et la seule solution que je pouvais concevoir en étant loin de chez moi c'est celle-ci .
Dans l'ordre des choses je vais :
- imprimer les différentes hélices et mesurer la poussée statique de chacune à la puissance maximale du moteur, je comparerai ensuite l'efficacité de chacune;
- en cas de résultats décevant ou insuffisant je monterais des moteurs plus puissant (un ami m'a conseillé des brushless de même puissance mais qui tournent deux fois moins vite);
- recourir au réducteur.





{kind=link}