Posté par
Posté par
Salut AlexBotMaker
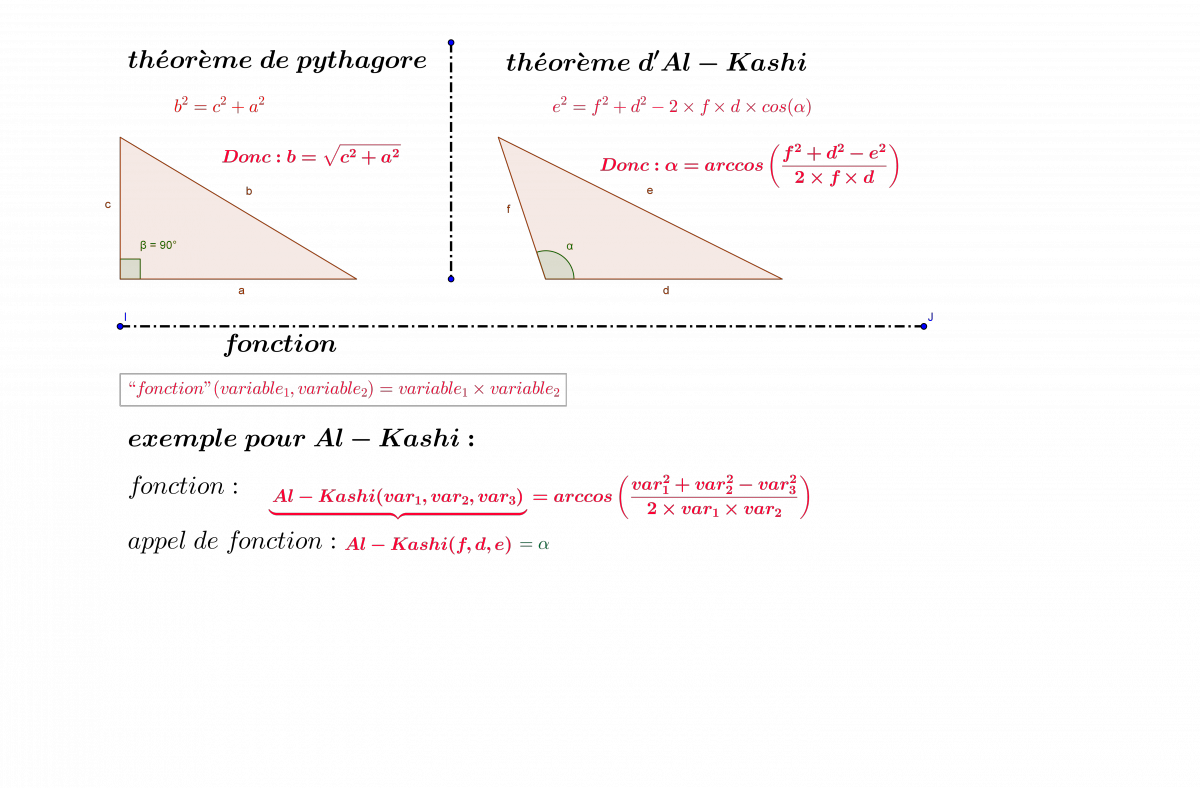
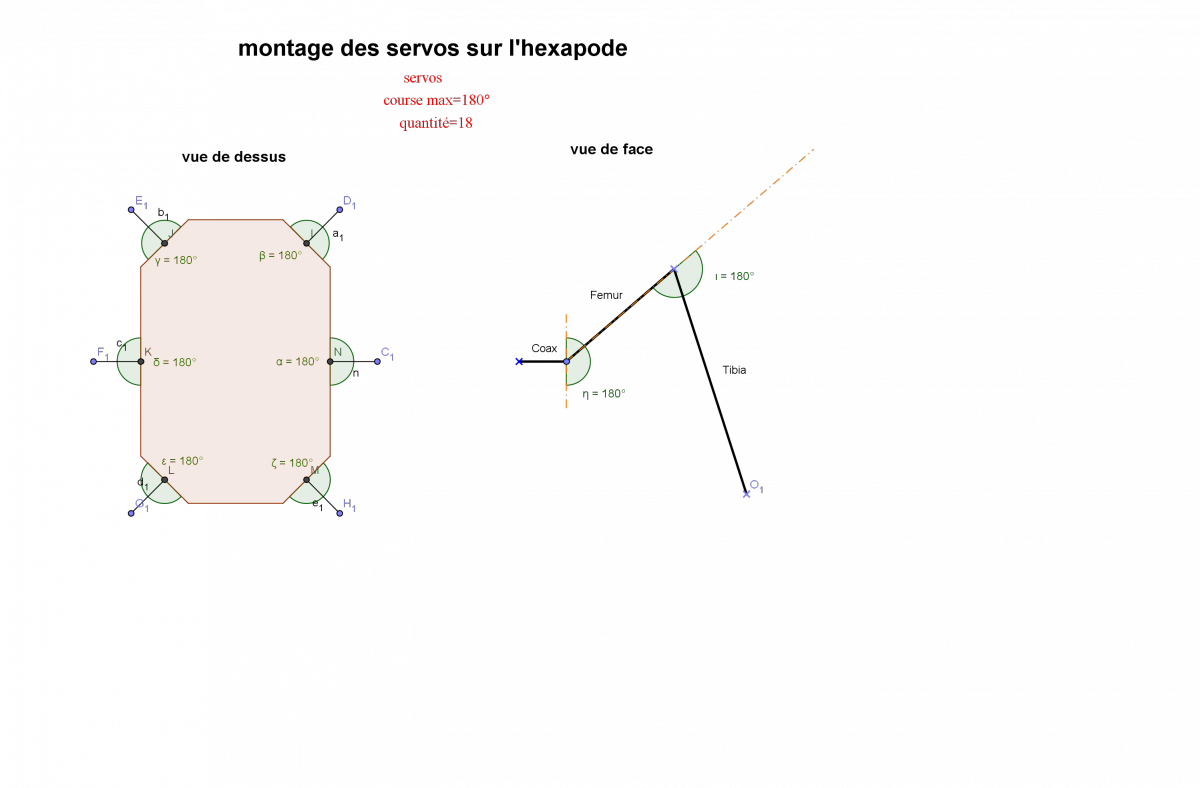
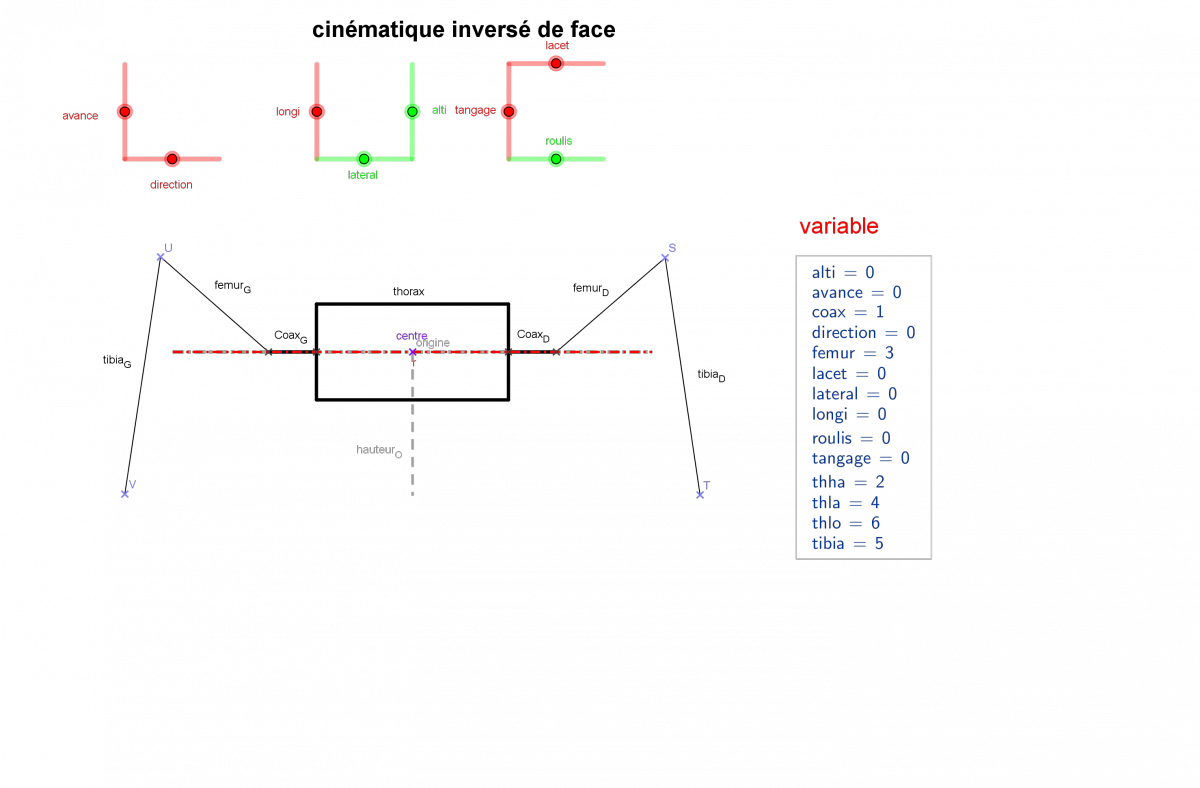
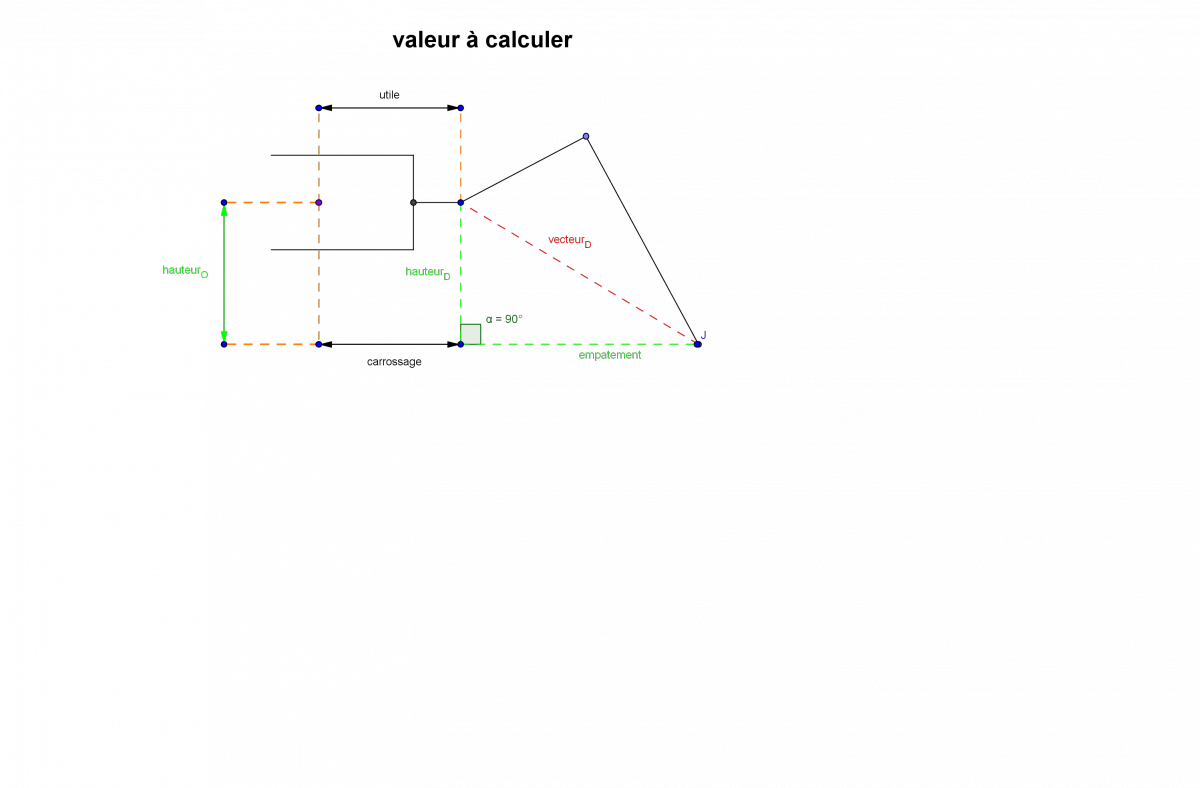
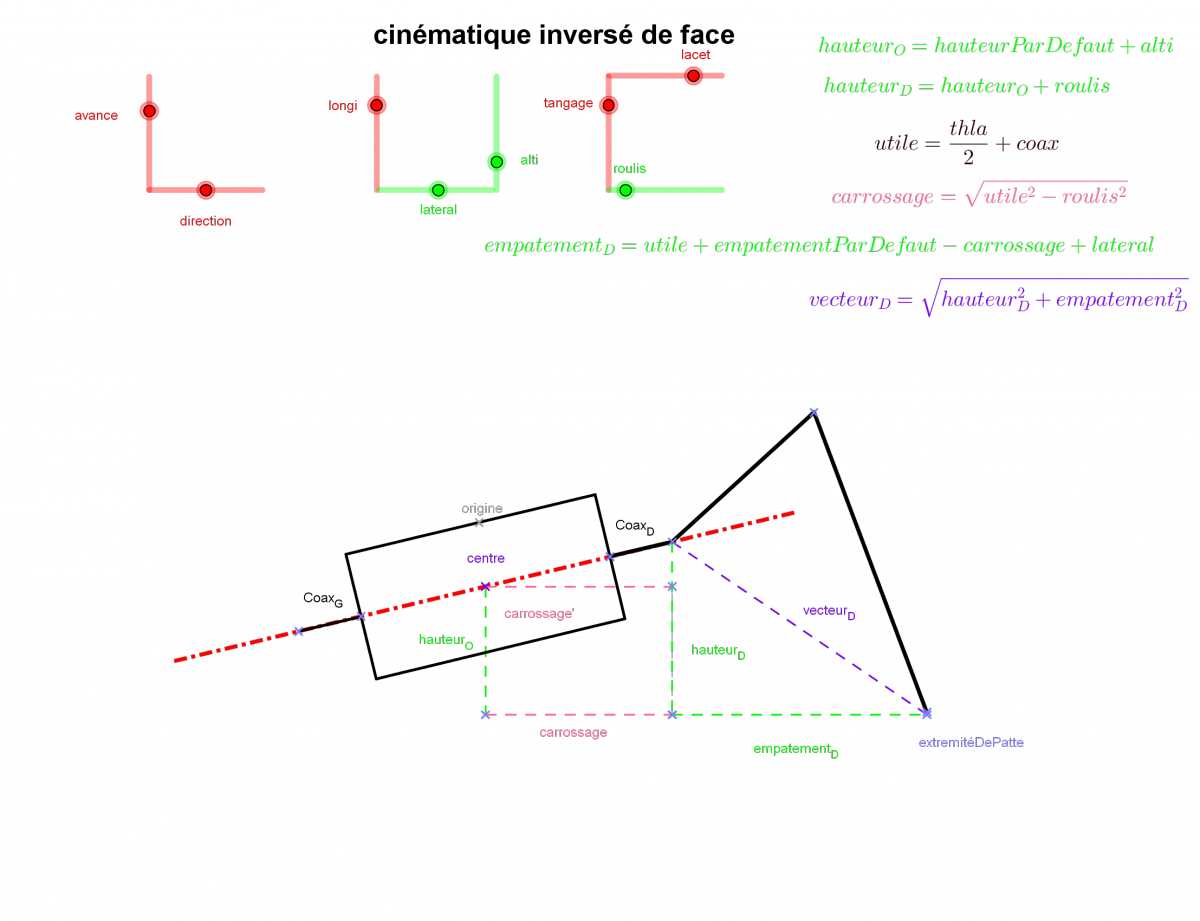
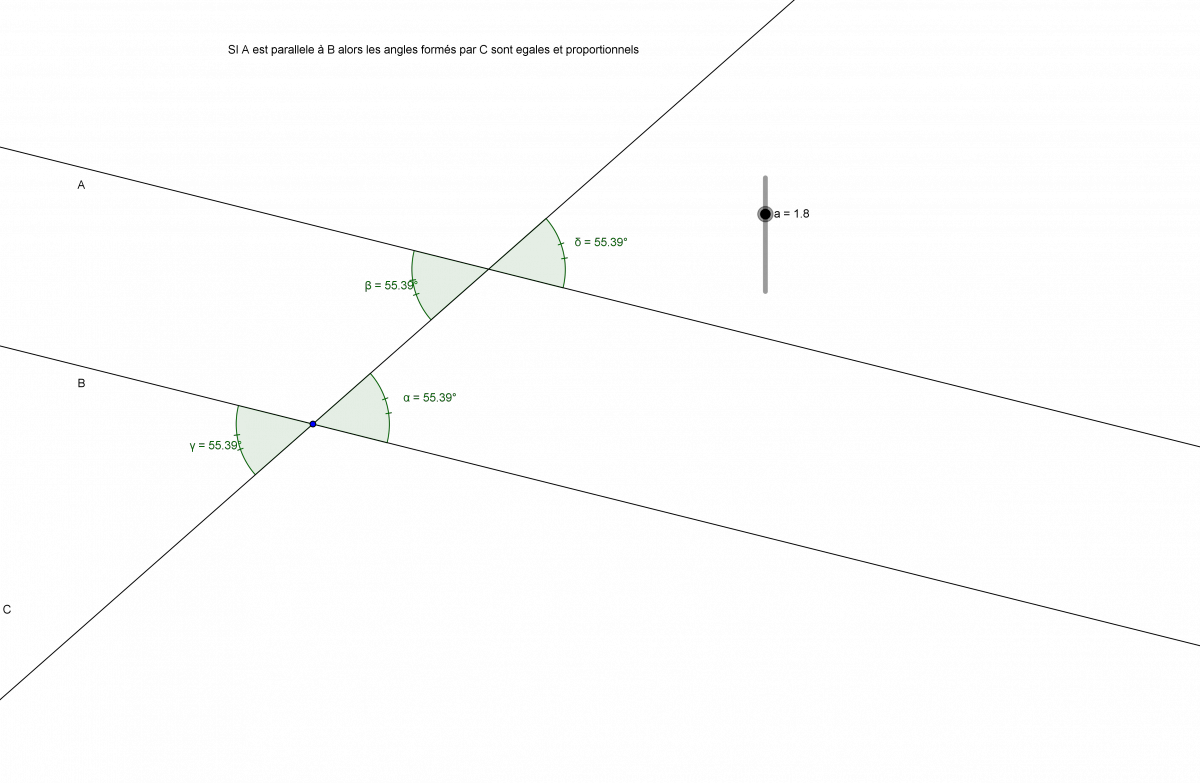
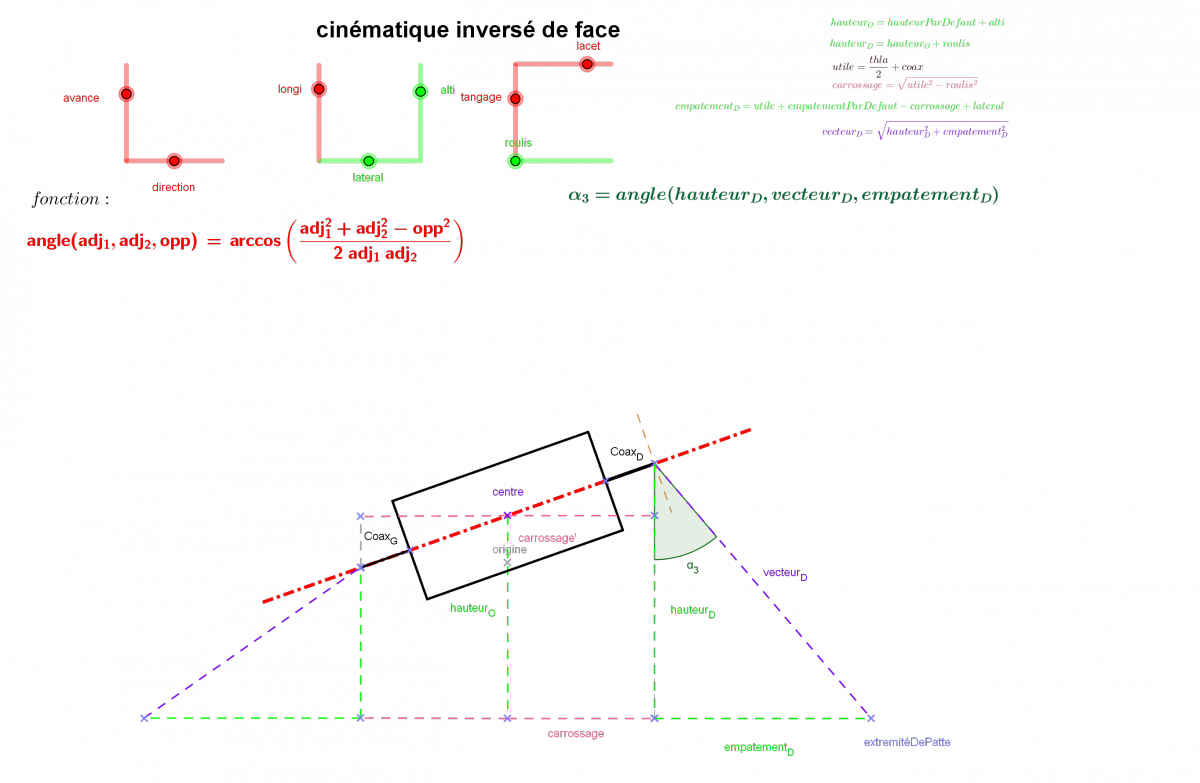
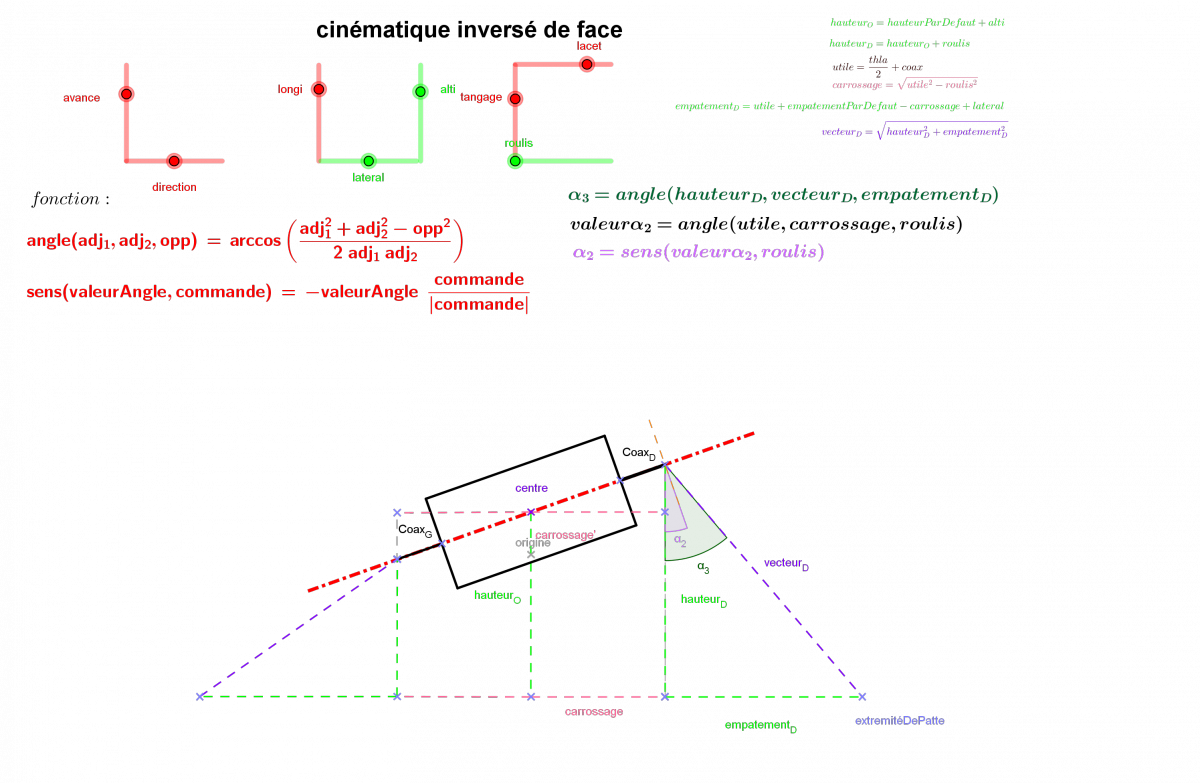
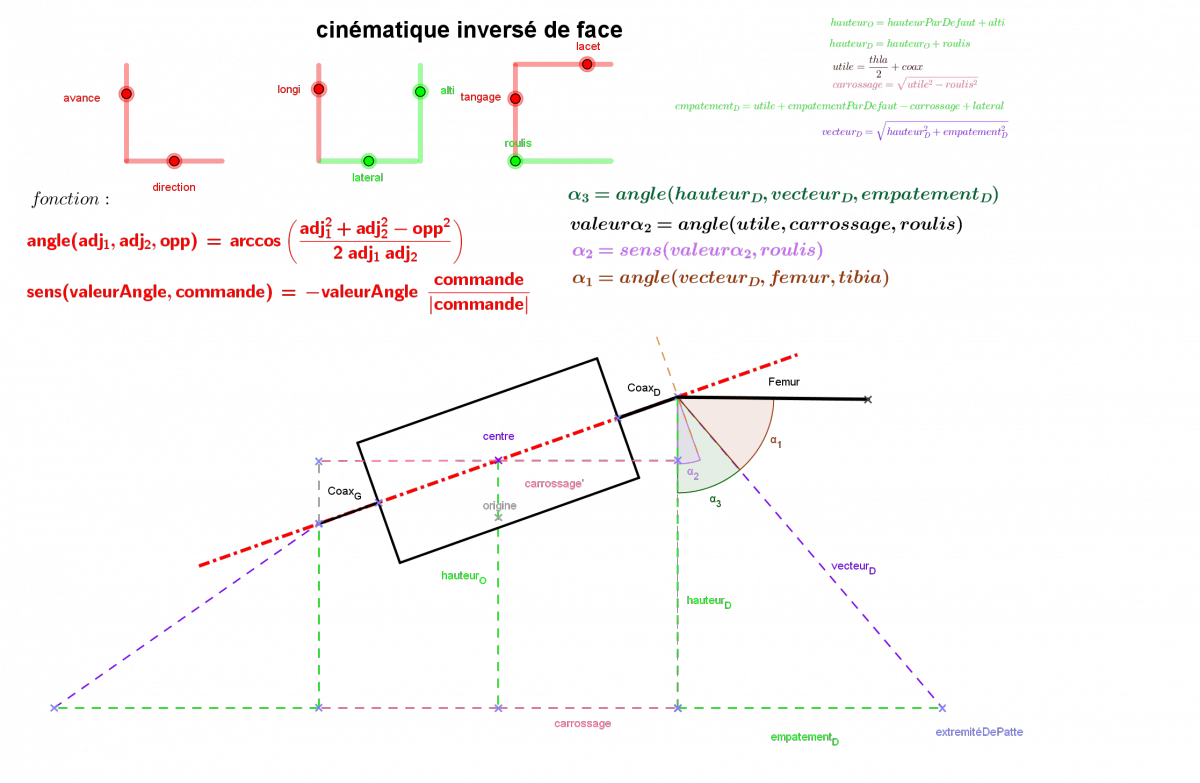
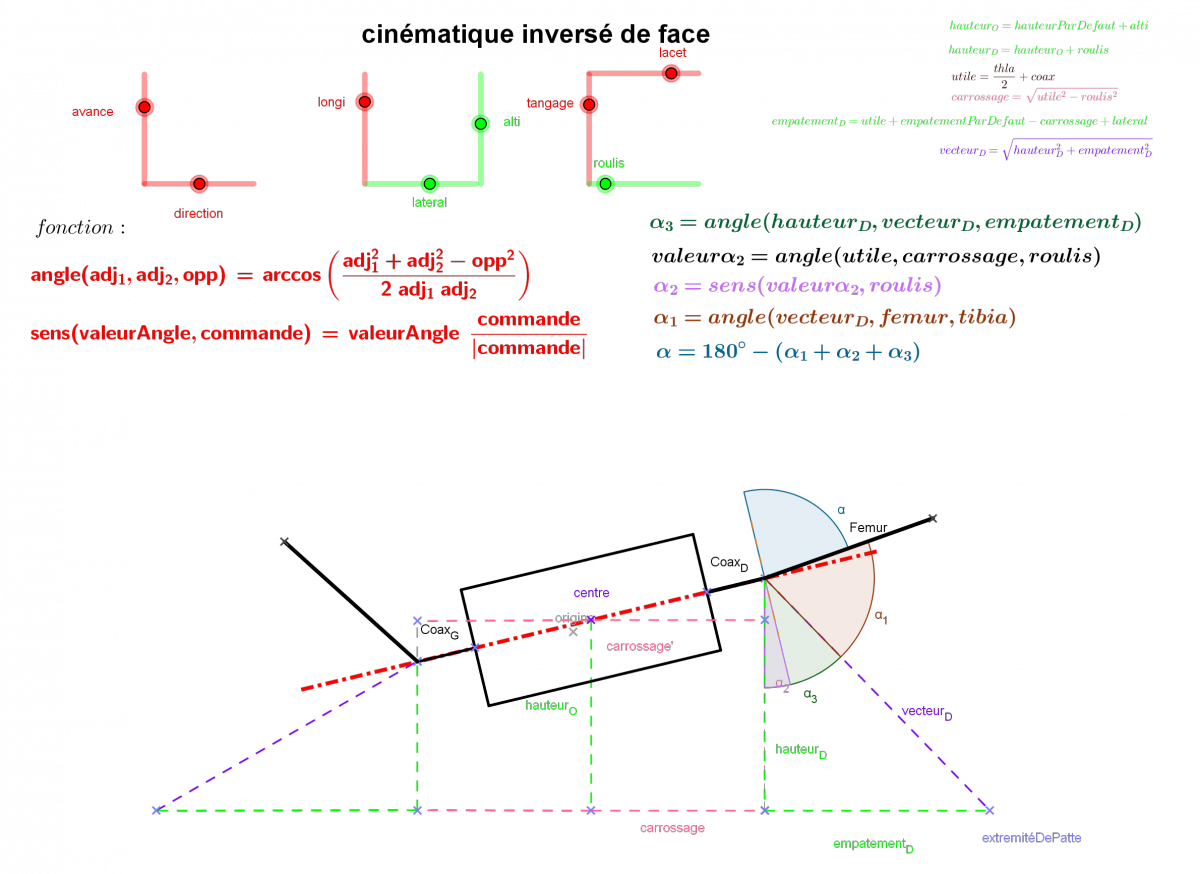
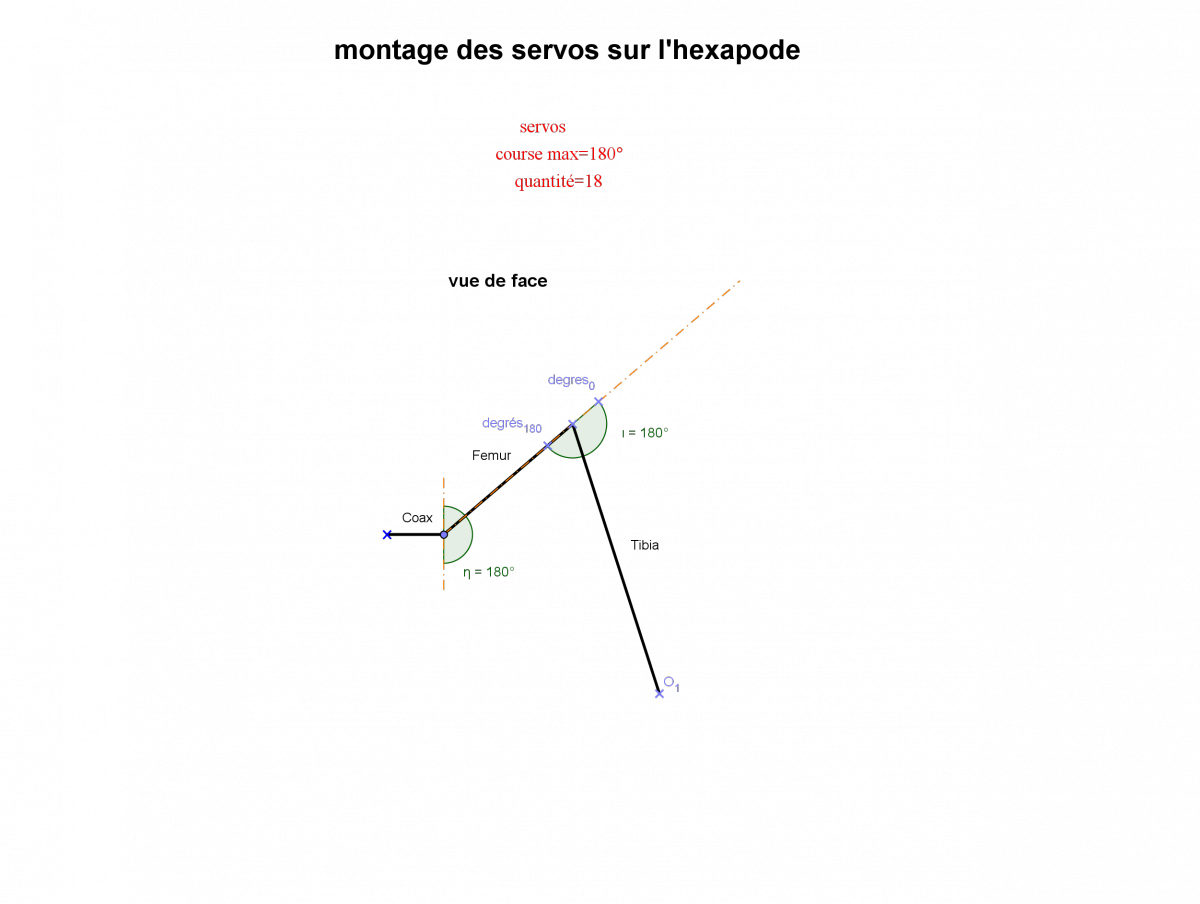
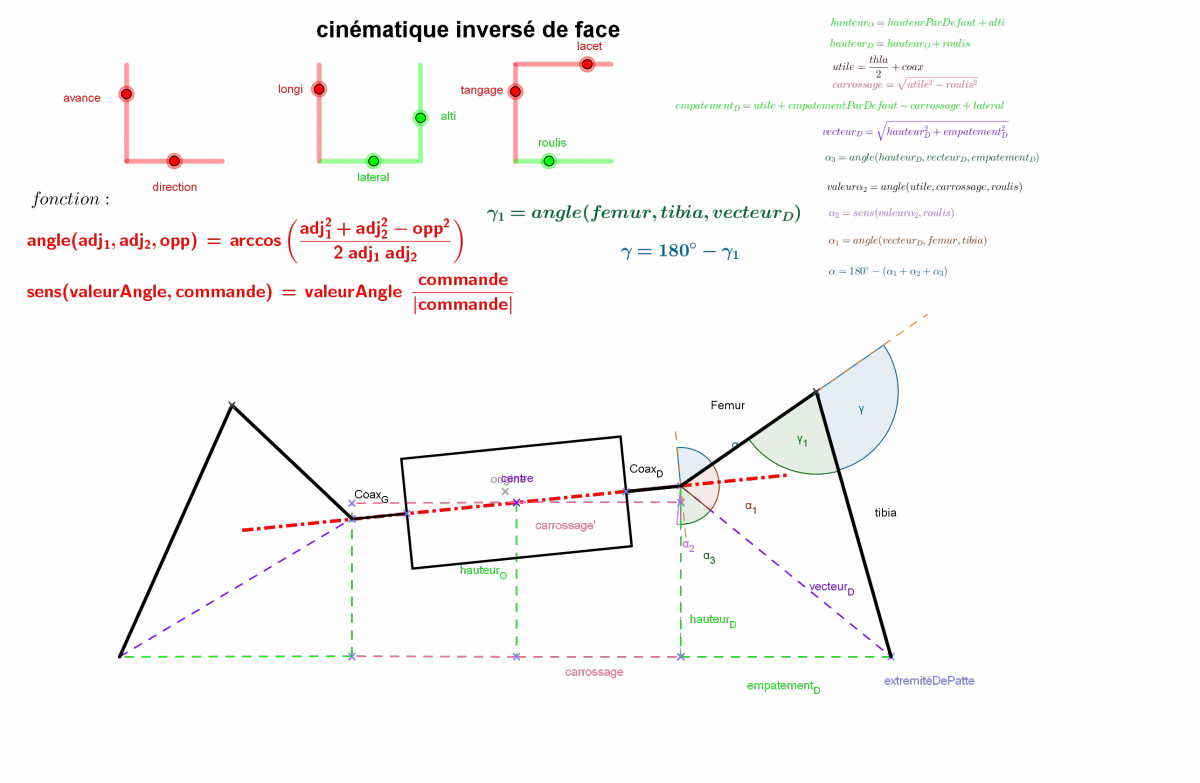
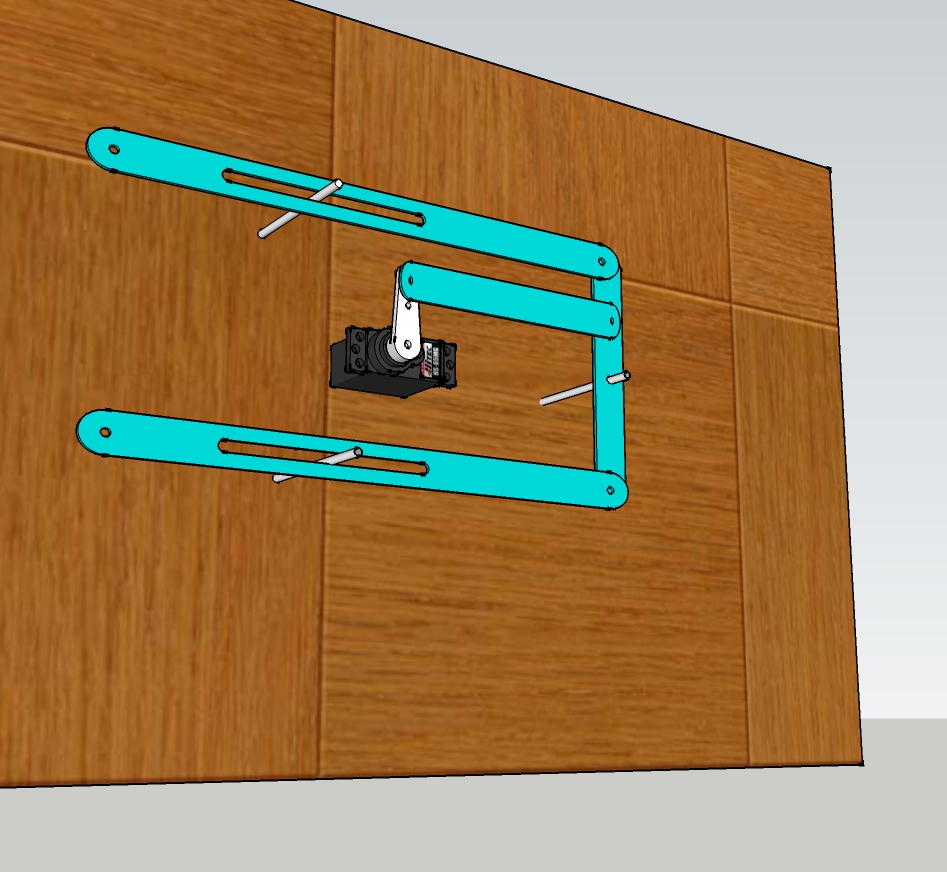
Je suis tres interresse par ton post , car je travail au programme de mon hexapode 3ddl (arduino,ssc32,18servo 180º) nom de code CR6VA1 et je me suis basé sur le meme principe que toi , a savoir pythagore et Al-kashi.
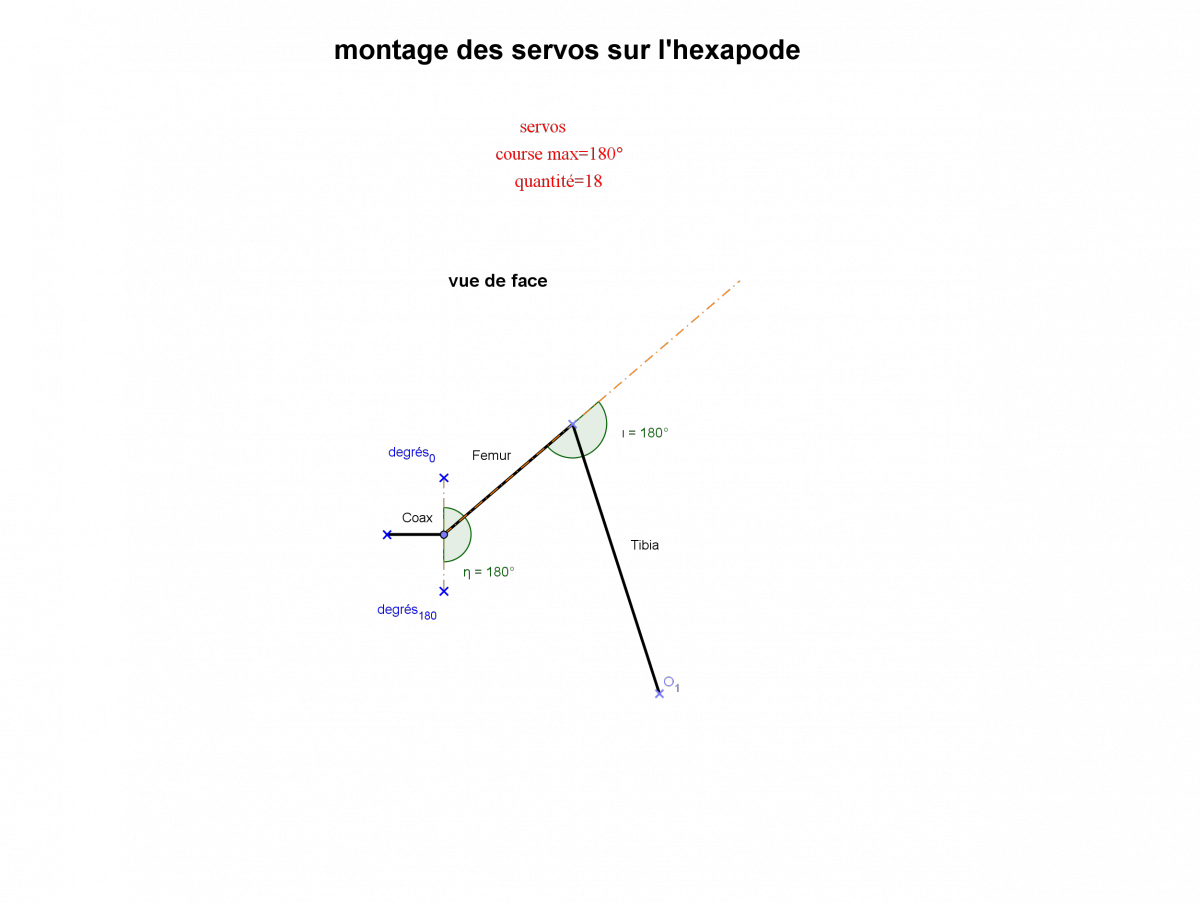
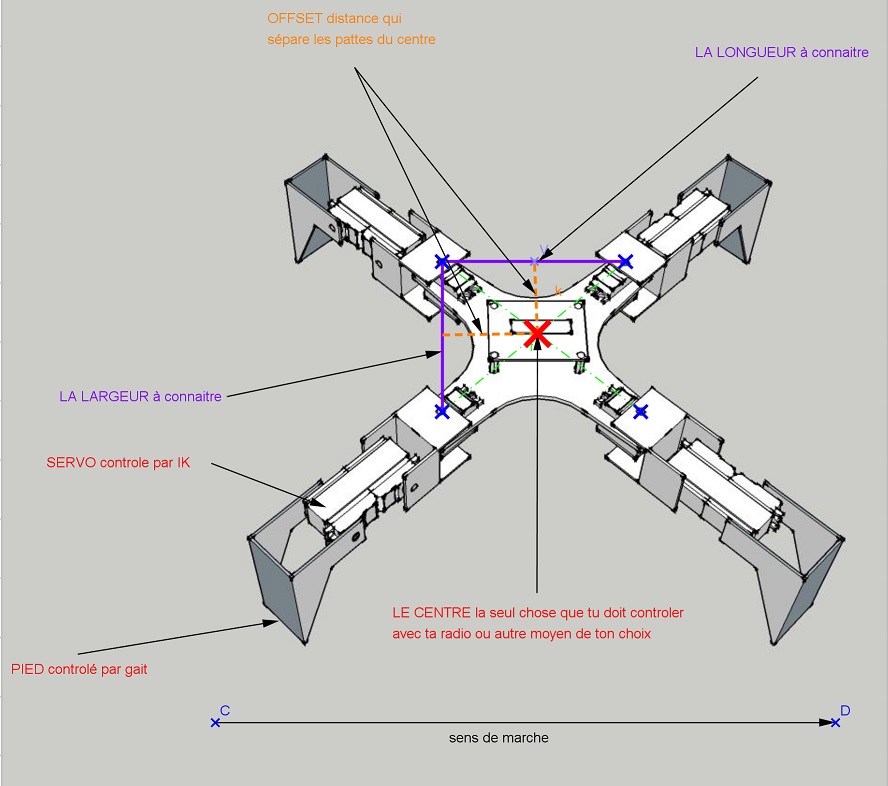
Pour ma part je suis partis sur une posture d origine , hauteur=longueur tibia/servo femur 90º et l empatement=(femur+tibia)/2 cette position correspond sur ma radio a tout les manche et inter au centre et des mouvements les plus amples possibles a CR6VA1 une fois que tu as trouvé celle ton ton quadri ca va tout seul :
https://tube.geogebra.org/m/1373193
Je suis seul sur mon robot et je manque d avis critique donc si ca peux d'aider ou si tu vois des amelioration a apporter suis prenneur.
N ayant aucune notion en math ni en programmation je m eclate a le faire.
Bon courage
 )niveau prog t'en ai ou ?
)niveau prog t'en ai ou ?