Tu as bien fais de mettre des commentaires
/>/> Je sais pas si on peut plus l'obtimiser mais dans tout les cas tant que ça fonctionne ça va xD
Les commentaires sa devrait être obligatoire ! lol
Comme tu dis tant que sa fonctionne
Il y a 16 élément(s) pour j-l freerider (recherche limitée depuis 04-mai 13)
 Posté par
sur 26 décembre 2013 - 10:23
dans
Autres projets inclassables
Posté par
sur 26 décembre 2013 - 10:23
dans
Autres projets inclassables
Tu as bien fais de mettre des commentaires
Posté par
sur 27 décembre 2013 - 11:32
dans
Autres projets inclassables
une première évolution consiste à remplacer toutes les procédures "PWM" par une function ayant pour paramètres PortNumber,TimeOn, TimeOFF.
Ceci permettrait ainsi d'avoir un balayage continu.
Cependant normalement les servos doivent être pilotés toutes les 20ms; pour ce faire, vu la taille du code, une procédure gérant les servos et qui n'est exécutée que toutes les 20ms est possible, le mieux étant de générer une interruption toutes 20ms.
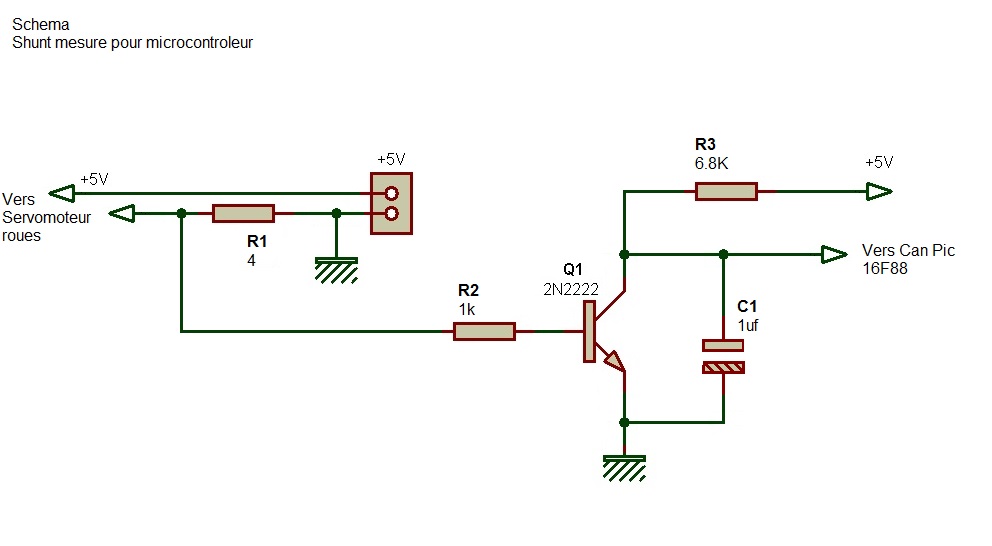
une autre : schéma de la mesure du courant ? un shunt sur le 0 avec un ampli op non inverseur?
Posté par
sur 27 décembre 2013 - 12:13
dans
Autres projets inclassables

Posté par
sur 27 décembre 2013 - 12:46
dans
Autres projets inclassables
et la valeur du shunt ?
as tu fait un essai sur table ? ne doit pas être linéaire et chute de tension importante ?
Posté par
sur 24 décembre 2013 - 10:28
dans
Autres projets inclassables
 />
/>
Posté par
sur 26 décembre 2013 - 09:47
dans
Autres projets inclassables
program mo_robot; // Robot balayeur
// PIC 16F88 / int 8 MHz
// Written and compiled with MikroPascal Pro V5.30
var
wIn1: word;
wIn2: word;
win3: word;
win4: word;
i: byte;
i1: byte;
i2: byte;
i3: byte;
i4: byte;
i5: byte;
i6: byte;
const
cdo = 523; cdod = 554; cre = 587; cred = 622; cmi = 659;
cfa = 698; cfad = 739; csol = 783; csold = 830; cla = 880;
clad = 932; csi = 987;
cdoG = 1046;
procedure Main_Init;
begin
CMCON := CMCON or $07; // turn off comparators
CCP1CON := CCP1CON or %00001100; // turn on PWM
OPTION_REG := %10000000; // pullup désactivé (bit 7 à 1)
INTCON := $00;
TRISA := %00001111;
TRISB := %00000000;
ANSEL := $00;
ANSEL.ANS0 := 1; // set RA0 as analog input
ANSEL.ANS1 := 1; // set RA1 as analog input
ANSEL.ANS2 := 1; // set RA2 as analog input
ANSEL.ANS3 := 1; // set RA3 as analog input
ANSEL.ANS4 := 0; // set RA4 as digital I/O
ANSEL.ANS5 := 0; // set RB6 as digital I/O
ANSEL.ANS6 := 0; // set RB7 as digital I/O
OSCCON := 0;
OSCCON.IRCF2 := 1;
OSCCON.IRCF1 := 1;
OSCCON.IRCF0 := 1;
ADC_Init;
delay_ms(100);
Sound_init(portb, 2);
end;
// Procedure de controle des servomoteur:
// Roue gauche----------------------------------------------------------------
procedure PWM_9;
begin
PORTB.0 := 1;
delay_us(1300);
PORTB.0 := 0;
delay_ms(5);
end;
procedure PWM_8;
begin
PORTB.0 := 1;
delay_us(800);
PORTB.0 := 0;
delay_ms(5);
end;
procedure PWM;
begin
{PORTB.0 := 1;
delay_us(1435);}
PORTB.0 := 0;
delay_ms(5);
end;
procedure pwm8;
begin
PORTB.0 := 1;
delay_us(2000);
PORTB.0 := 0;
delay_ms(5);
end;
procedure pwm9;
begin
PORTB.0 := 1;
delay_us(1525);
PORTB.0 := 0;
delay_ms(5);
end;
// Roue droite----------------------------------------------------------------
procedure PWM_9_;
begin
PORTB.1 := 1;
delay_us(1280);
PORTB.1 := 0;
delay_ms(5);
end;
procedure PWM_8_;
begin
PORTB.1 := 1;
delay_us(800);
PORTB.1 := 0;
delay_ms(5);
end;
procedure PWM_;
begin
{PORTB.1 := 1;
delay_us(1425);}
PORTB.1 := 0;
delay_ms(5);
end;
procedure pwm8_;
begin
PORTB.1 := 1;
delay_us(2000);
PORTB.1 := 0;
delay_ms(5);
end;
procedure pwm9_;
begin
PORTB.1 := 1;
delay_us(1590);
PORTB.1 := 0;
delay_ms(5);
end;
// Servo avec capteur infrarouge-----------------------------------------------
procedure pwmIR;
begin
PORTA.4 := 1;
delay_us(1425);
PORTA.4 := 0;
delay_ms(2);
end;
procedure pwmIR1;
begin
PORTA.4 := 1;
delay_us(1925);
PORTA.4 := 0;
delay_ms(2);
end;
procedure pwmIR2;
begin
PORTA.4 := 1;
delay_us(925);
PORTA.4 := 0;
delay_ms(2);
end;
// Servo du Balai rotatif------------------------------------------------------
procedure pwmB;
begin
PORTB.4 := 1;
delay_us(2800);
PORTB.4 := 0;
delay_ms(2);
end;
procedure pwmB1;
begin
PORTB.4 := 1;
delay_us(1200);
PORTB.4 := 0;
delay_ms(2);
end;
//------------------------------------------------------------------------------
// Procedure de synchronisation des servos:
procedure robot_1; // marche avant / servoIR à gauche
begin
i:=0;
while i < 10 do
begin
inc(i);
pwmIR1; PWM_9; PWM9_; pwmB;
end;
end;
procedure robot_courant; // évitement après mesure de courant > à la référence
begin
i1:=0;
while i1 < 60 do
begin
inc(i1);
pwmB1; PWM8; PWM8_;
end;
end;
procedure robot_obstacle1; //contournement par la droite
begin
i2:=0;
while i2 < 30 do
begin
inc(i2);
PWM9; PWM9_;
end;
end;
procedure robot_2; // marche avant / servoIR au centre
begin
i3:=0;
while i3 < 10 do
begin
inc(i3);
pwmIR; PWM_9; PWM9_; pwmB;
end;
end;
procedure robot_3; // marche avant / servoIR à droite
begin
i5:=0;
while i5 < 10 do
begin
inc(i5);
pwmIR2; PWM_9; PWM9_; pwmB;
end;
end;
procedure robot_obstacle2; //contournement par la gauche
begin
i6:=0;
while i6 < 30 do
begin
inc(i6);
PWM_9; PWM_9_;
end;
end;
begin
Main_Init;
delay_ms(100);
sound_play(cdo, 200);
delay_ms(100);
sound_play(cdo, 200);
delay_ms(3000);
sound_play(cla, 160); // Intro musique Mario Bros... (très important ..)
delay_ms(2);
sound_play(cla, 160);
delay_ms(60);
sound_play(cla, 180);
delay_ms(60);
sound_play(cfa, 160);
delay_ms(2);
sound_play(cla, 160);
delay_ms(60);
sound_play(cdoG, 180);
delay_ms(420);
sound_play(cdo, 180);
delay_ms(1000);
wIn2 := ADC_Read(1) ; // lecture référence de réglage pour le capteur IR
wIn4 := ADC_Read(2); // lecture référence de réglage pour la mesure de courant
while true do
begin
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 <= win2) then
begin
robot_1;
wIn3 := ADC_Read(3); // lecture pour mesure de courant
if (wIn3 < win4) then
begin
robot_courant;
end;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 > win2) then
begin
robot_obstacle1;
end;
end;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 <= win2) then
begin
robot_2;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 > win2) then
begin
robot_obstacle2;
end;
end;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 <= win2) then
begin
robot_3;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 > win2) then
begin
robot_obstacle2;
end;
end;
wIn1 := ADC_Read(0) ; // lecture capteur IR
if (wIn1 > win2) then
begin
PWM9; PWM_9_;
PWM9; PWM_9_;
end;
end;
end.
Posté par
sur 23 décembre 2013 - 10:54
dans
Autres projets inclassables
Posté par
sur 22 décembre 2013 - 06:17
dans
Autres projets inclassables
Salut !
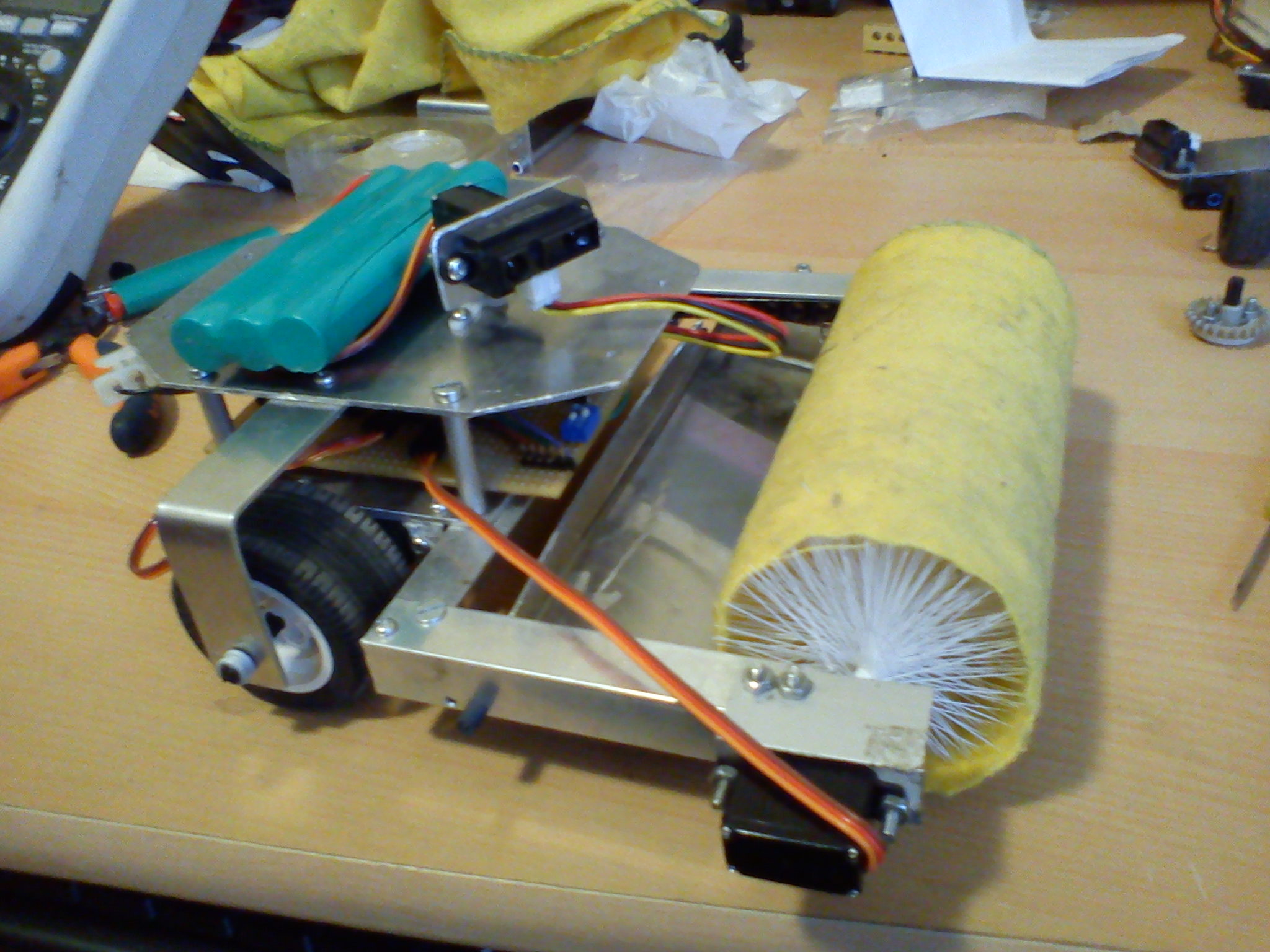
Donc je vous présente mon 1er projet robotique, un robot balayeur,.
Je suis pas le 1er et certainement pas le dernier a faire quelque chose du genre, juste l'architecture différente de se que j'ai pu voir ici et là.
Le châssis est réalisé avec de l'aluminium de récup', Les roues sont propulsée pas des petit servos modifiés pour fonctionner en rotation continu, Même chose pour le moteur de la brosse rotative.
Au niveau électronique, un PIC 16f88 s'occupe du contrôle des données, un capteur de distance IR Sharp posé sur un servomoteur pour la détection d'obstacle et une mesure de courant consommé sur les moteur des roue via le CAN du Pic, pour contourner un éventuel obstacle qui aurait échappé au capteur IR.
Je ne sais pas si mettre le programme du Pic est utile ? si besoin y'a qu'à demander
Assez parlé : voici 2 vidéos de la bête:
et la 2ème !
Bon visionnage !
J-L
Posté par
sur 23 décembre 2013 - 06:41
dans
Autres projets inclassables
Posté par
sur 23 décembre 2013 - 07:34
dans
Autres projets inclassables
Posté par
sur 23 décembre 2013 - 07:33
dans
Autres projets inclassables
Posté par
sur 23 mai 2018 - 06:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 23 mai 2018 - 06:11
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 23 mai 2018 - 05:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 23 mai 2018 - 05:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 22 décembre 2013 - 05:48
dans
Et si vous vous présentiez?
/> 



