Salut !
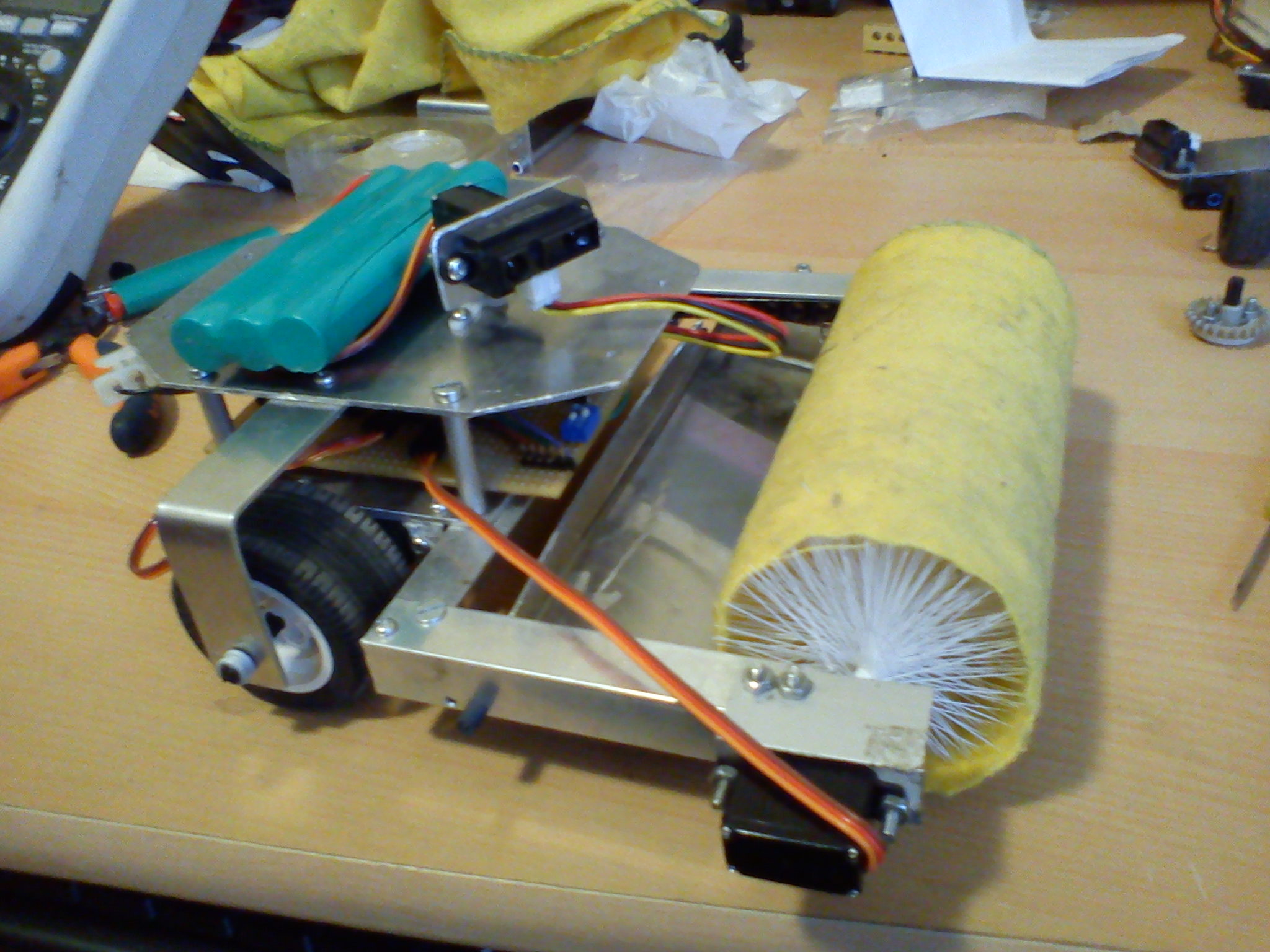
Donc je vous présente mon 1er projet robotique, un robot balayeur,.
Je suis pas le 1er et certainement pas le dernier a faire quelque chose du genre, juste l'architecture différente de se que j'ai pu voir ici et là.
Le châssis est réalisé avec de l'aluminium de récup', Les roues sont propulsée pas des petit servos modifiés pour fonctionner en rotation continu, Même chose pour le moteur de la brosse rotative.
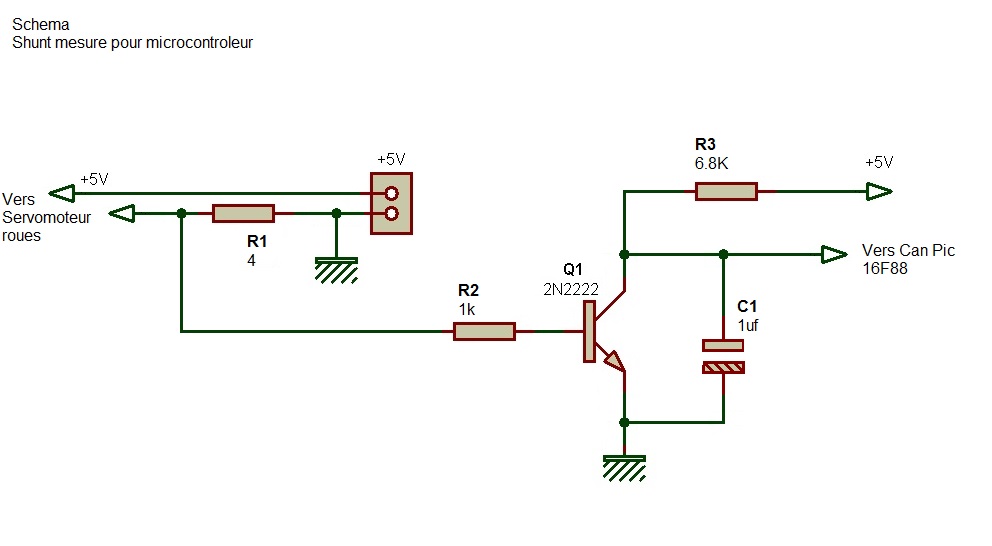
Au niveau électronique, un PIC 16f88 s'occupe du contrôle des données, un capteur de distance IR Sharp posé sur un servomoteur pour la détection d'obstacle et une mesure de courant consommé sur les moteur des roue via le CAN du Pic, pour contourner un éventuel obstacle qui aurait échappé au capteur IR.
Je ne sais pas si mettre le programme du Pic est utile ? si besoin y'a qu'à demander 
Assez parlé : voici 2 vidéos de la bête:
et la 2ème !
Bon visionnage ! 
J-L