Posté par
Posté par
Pour en revenir au sujet de départ ^^ je planche sur le schéma électrique et j'ai deux questions...
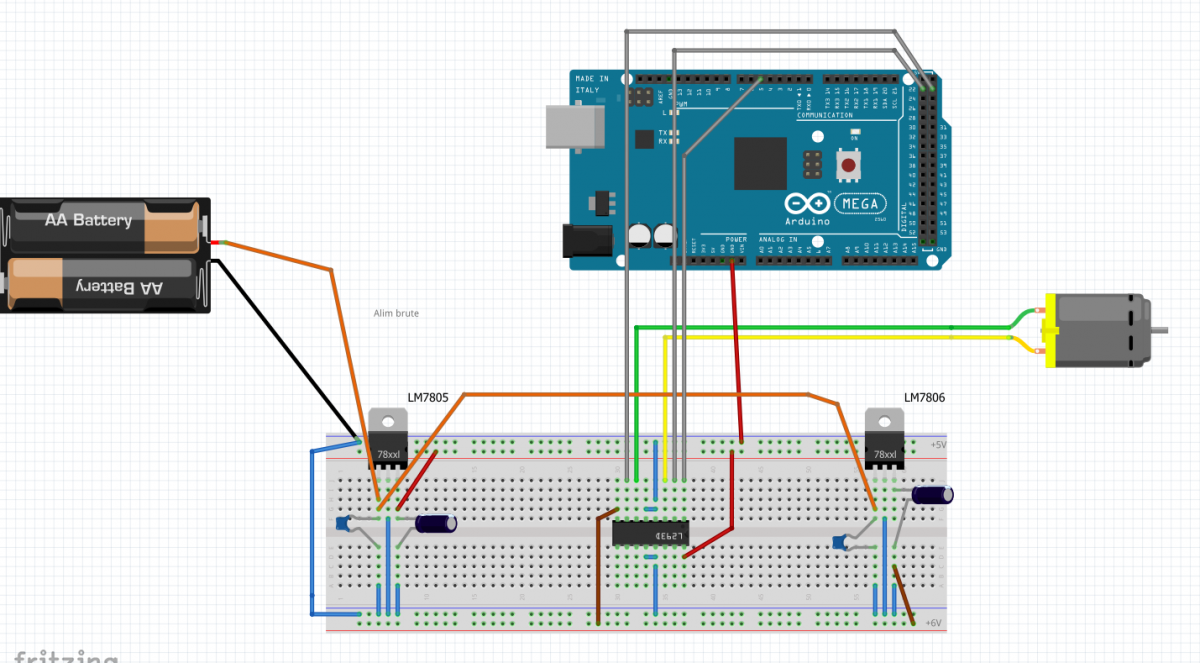
1) J'ai 2 mcc en 6V nominal piloté en pwm avec un L293D. Du coup sur la broche VCC2 du L293D je dois envoyer du 6V c'est bien ça ? Et ce même si la tension aux bornes du moteur va varier.
Dois-je réguler cette tension en amont ?
Nota : l'alim 5V est régulée et le 6v qui va sur vcc2 est tiré en amont de la régul
2) Je pensais partir sur un jeu de batterie rechargeable qui affiche 2600mAh AA traditionnel pour alimenter le circuit. Est-ce la bonne technologie ou pas ?



 Par exemple, sur l'humanoïde, j'ai passé plusieurs mois à l'assembler jusqu'à ce qu'il soit trop lourd pour pour en faire quelque chose. Je le mets en pause pour réfléchir tranquillement et je suis retourné sur un autre qui me permet d'explorer l'odométrie. Tu gères ça comme tu veux/peux.
Par exemple, sur l'humanoïde, j'ai passé plusieurs mois à l'assembler jusqu'à ce qu'il soit trop lourd pour pour en faire quelque chose. Je le mets en pause pour réfléchir tranquillement et je suis retourné sur un autre qui me permet d'explorer l'odométrie. Tu gères ça comme tu veux/peux.