Je viens de finir de lire les 37 pages du topic, je suis franchement impressionné par le boulot effectué !
Contenu de Elharion
Il y a 65 élément(s) pour Elharion (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#93836 Glenn Robot Humanoide
 Posté par
sur 27 mars 2018 - 02:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 27 mars 2018 - 02:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#93797 Cours de robotique
Posté par
sur 26 mars 2018 - 01:55
dans
Conseils et aide aux débutants, livres et kits en robotique
J'en profite pour venir compléter avec les cours de méca que j'ai eu en DUT et Ecole d'ing.
Le site est pas complet de mémoire, mais il y a l'essentiel de son support de cours.
Ca peut servir en particulier sur la partie cinématique du point et du solide qui est franchement bien 
#93779 Wall Pi
Posté par
sur 26 mars 2018 - 12:03
dans
Robots roulants, chars à chenilles et autres machines sur roues
Et ben c'est repartit pour beaucoup de lecture ! 
Au final, le robot sera toujours pas assemblé que j'aurais lu 10 000 pages xD
(c'est pas exact ^^ tant que je le fais pas rouler je peux coder l'arduino ^^)
Coucou, perso j'utilise la librairie RS232, via USB ça déconnait je perdais des données, Mike par la suite m'a conseillé de passer en RX/TX qui fonctionne nettement mieux.
Ceci dit je ne connais pas la librairie SFML.
SFML est plus orienté jeux vidéo et regroupe pas mal de modules (audio, graphisme, système, réseau et fenêtrage). Dans les fait c'est une bibliothèque haut niveau qui permet de faire beaucoup de choses. Et comme je veux pouvoir faire une interface sympas et que la pi va pas utiliser ses GPIO (a part l'UART visiblement ^^) ça me parait être une bonne solution ^^
#93599 Wall Pi
Posté par
sur 20 mars 2018 - 11:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
La pour le coup c'est essentiellement de la quicaillerie dont j'ai besoin du coup la boutique est trop limité sur ce coup là.... :/
#88998 Wall Pi
Posté par
sur 18 octobre 2017 - 03:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Après relecture d'un cours de PWM ma 1ere question est pas vraiment utile. ^^ Et la réponse est que je dois réguler cette tension.
Néanmoins, pour la seconde question, avez vous un conseil sur le type de batterie à utiliser ? ^^
#93775 Wall Pi
Posté par
sur 26 mars 2018 - 10:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut à tous,
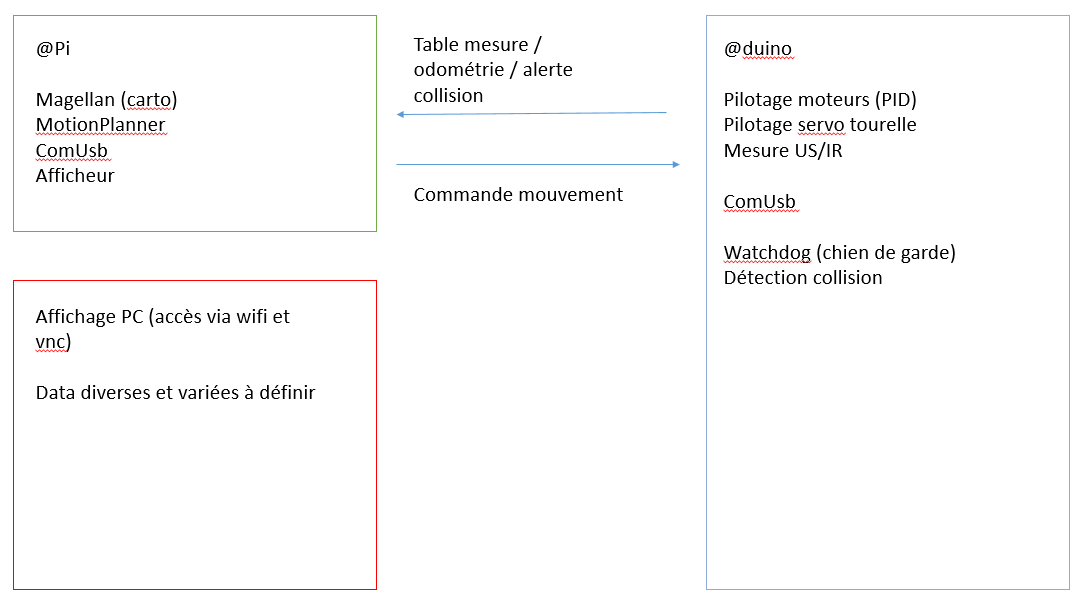
Je suis en train de réfléchir à ma gestion entre la pi et l'arduino. Voilà globalement l'idée à court termes.
J'ai une question, je veux coder la pi en c++. Est-ce que vous avez des suggestions de library pour commencer ? Par défaut j'aurais tendance à partir sur la SFML. Elle est pas forcément faite pour ça mais c'est un gros couteaux suisse. Le seul point qui m'inquiète au final c'est la com via USB sur cette library.
Vous auriez une suggestion plus pertinente ?
Image(s) jointe(s)
#93893 Wall Pi
Posté par
sur 28 mars 2018 - 08:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
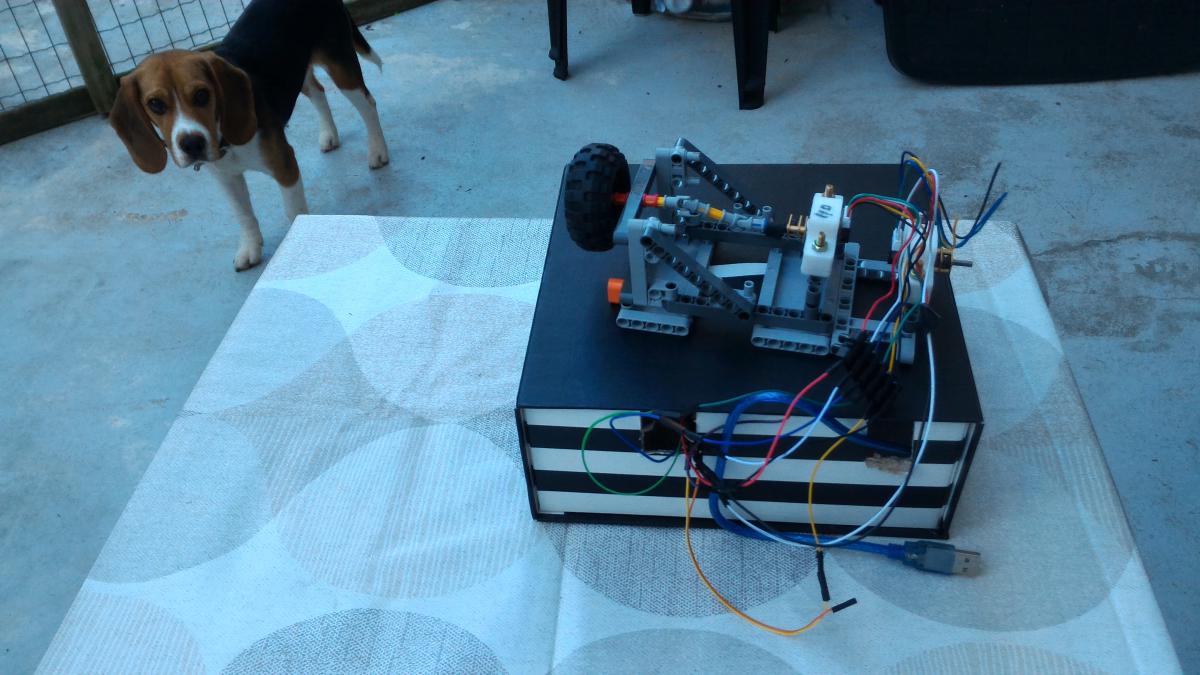
Les pièces de l'impression 3D sont arrivées
Du coup premier assemblage
Les lego technic fonctionnent bien avec je suis plutôt content du résultat
Par contre j'ai été surpris par la difficulté de la conception en vue de l'impression 3D ^^
Du coup premier assemblage
Les lego technic fonctionnent bien avec je suis plutôt content du résultat
Par contre j'ai été surpris par la difficulté de la conception en vue de l'impression 3D ^^
Image(s) jointe(s)

#94354 Wall Pi
Posté par
sur 12 avril 2018 - 08:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
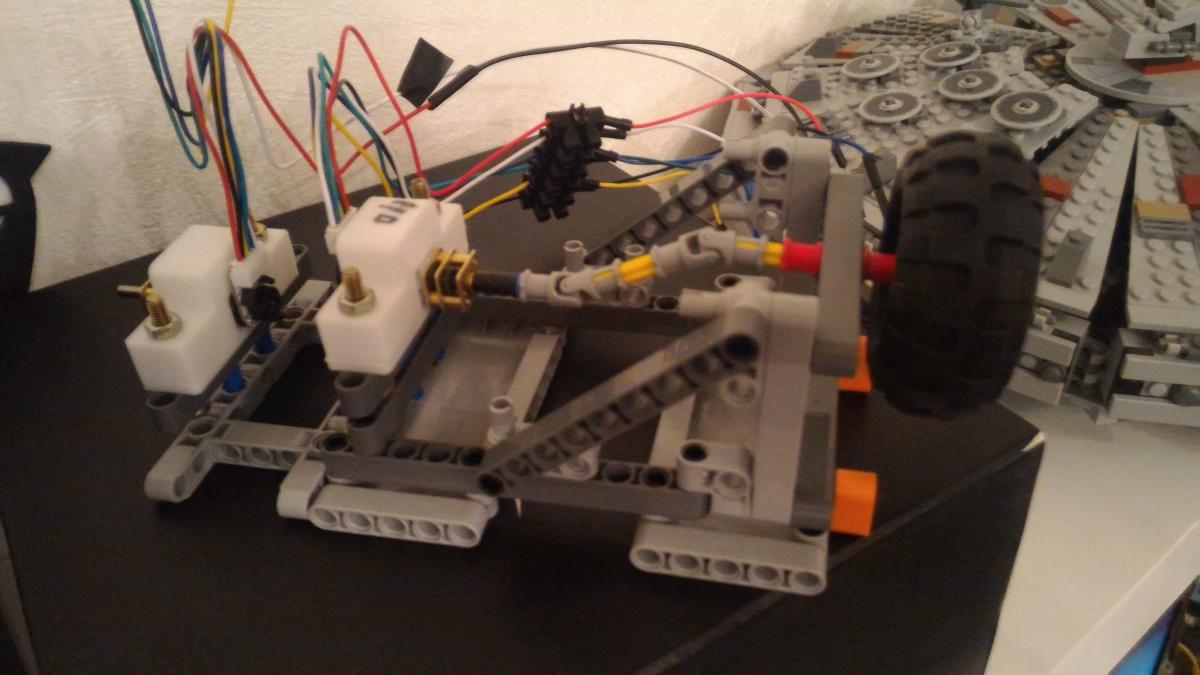
Voilà pour la photo zoomé.
Le but c'est d'avoir une base pour tester le code maison :
-contrôle commande du moteur
-réglage du PID
-Premiers algo de navigation
-Vérification que tout fonctionne comme prévu
Le tout sans avoir à courir derrière le robot ^^
J'implémente au fur et à mesure afin d'avoir des résultats et de pas être noyé par la complexité.
Le montage avec cardan c'est juste pour le fun ^^ (et parce que les accouplements directs c'est pas bon pour les moteurs ^^)
Image(s) jointe(s)
#94347 Wall Pi
Posté par
sur 12 avril 2018 - 06:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
Petite mise à jour !
J'ai monté le premier chassis moteur et testé le PID fait maison.... Et ben c'est la *ù$^ù j'avais zappé que les double sont tous petit sur arduino et du coup il faut que je reprenne mon code 
Image(s) jointe(s)
#94093 Wall Pi
Posté par
sur 05 avril 2018 - 03:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ca y est il roule !!! Enfin non mais j'ai fait tourner un moteur DC avec une lib faites maison 
Etape suivante, supprimer les delay qui trainent à droite à gauche (vive le temps réel !) et réfléchir à mon motion controller ^^
Histoire que ca reste simple dans le main ^^
C'est un petit tour pour wallPi mais un grand pas pour moi
#93895 Wall Pi
Posté par
sur 28 mars 2018 - 09:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Mdr ! Et la tu les vois pas tous
#88993 Wall Pi
Posté par
sur 18 octobre 2017 - 12:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour en revenir au sujet de départ ^^ je planche sur le schéma électrique et j'ai deux questions...
1) J'ai 2 mcc en 6V nominal piloté en pwm avec un L293D. Du coup sur la broche VCC2 du L293D je dois envoyer du 6V c'est bien ça ? Et ce même si la tension aux bornes du moteur va varier.
Dois-je réguler cette tension en amont ?
Nota : l'alim 5V est régulée et le 6v qui va sur vcc2 est tiré en amont de la régul
2) Je pensais partir sur un jeu de batterie rechargeable qui affiche 2600mAh AA traditionnel pour alimenter le circuit. Est-ce la bonne technologie ou pas ?
#88981 Wall Pi
Posté par
sur 18 octobre 2017 - 10:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je fais la liste dans la journée, mais elle sera vraiment partielle, j'ai pas finis mon schéma ^^
#88077 Wall Pi
Posté par
sur 28 septembre 2017 - 07:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
bipède = suicide ....oui et non.....j'suis encore vivant mais je comprends très bien ce que tu veux dire par là.....
C'est par rapport à mes compétences actuelles ^^
#88102 Wall Pi
Posté par
sur 28 septembre 2017 - 12:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici le diagramme Fast à l'heure actuelle :
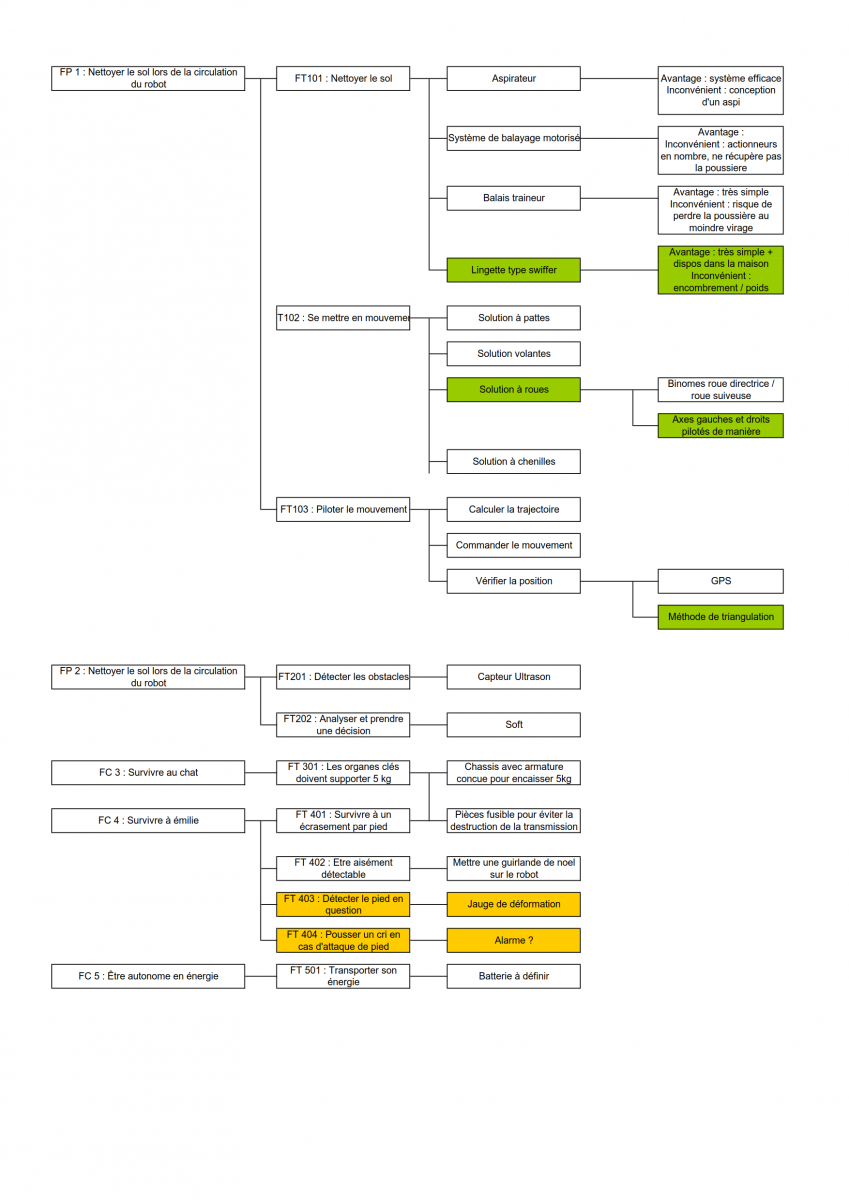
Les fonctions en verts sont les solutions retenues quand il y a des choix multiples.
Les 2 fonctions en jaune, je les prends pas au sérieux et on verra plus tard ^^
Mon premier questionnement se situe sur la méthode de triangulation où je réfléchis encore à la solution adéquate.
La problématique est la suivante :
Je vais piloter mes moteurs ce qui va faire avancer le robot. En connaissant la vitesse et le temps écoulé, je peux en déduire une position théorique. Mais c'est une boucle ouverte. Et ayant en tête l'objectif de faire du mapping, je pensais créer un repère cartésien représentant la pièce dans laquelle le robot va évoluer. Sauf que pour compenser toutes les incertitudes, il faut que le robot puisse se recalibrer.
J'ai d'abord pensé à des lasers pour aller chercher la distance par rapport aux murs. Mais ça ne marchera pas (meuble, obstacle quelconque ou encore mur par droit qui fausseront la mesure).
La solution qui me paraitrait judicieuse serait de placer 2 émetteurs dans la pièces à des points fixes. A partir de là, avec un récepteur sur le robot, je peux trianguler sa position. C'est loin d'être parfait mais ça devrait le faire. Par contre j'ai aucune idée de la difficulté à mettre ce genre de technos en place... Est-ce compliqué ?
Edit : Est-ce vraiment utile ? ^^
#88074 Wall Pi
Posté par
sur 28 septembre 2017 - 07:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici ce qu'on entend par rover, aujourd'hui :
nasa_mars_rover_3.jpg
Ce genre de véhicules tout terrain présentent des difficultés mécaniques très importantes.
Alors que toi, il me semble, ce que tu voudrais faire, c'est une véhicule roulant sur un parquet bien lisse.
Effectivement Oracid, ce ne sera pas un Rover (c'est dommage j'aimais beaucoup le nom). Clairement je vais aller au plus simple avec surement une suspension en triangle lego, mais je veux pas aller m’empêtrer dans des systèmes mécaniques complexes qui ne résoudront aucun problèmes pour le moment.
C'est très classe les rover... Mais pas du tout dans mes objectifs du moment ^^
salut,
Projet sympa et effectivement tu as bien raison de ne pas te lancer dans un bipède...
Le mapping....ça c'est cool !! Vraiment cool !!
J'ai eu la chance d'avoir un cours de robotique il y a quelques années. Au programme un état de l'art (où le professeur nous a expliqué les problématiques rencontrés notamment sur les bipèdes) et de la cinématique inverse ^^
Du coup, s'embarquer dans un bipède sans connaissance concrète c'est synonyme de suicide ^^
#88070 Wall Pi
Posté par
sur 28 septembre 2017 - 05:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bah ca dépend de la definition que tu lui donnes. En y réfléchissant ce sera plus un véhicule "autonome" qu'un rover à proprement parler.
Donc si par rover on entend une base roulante sur laquelle j'integrerai progressivement des composants oui c'est ce que j'ai envie de faire. Pourquoi ?
Donc si par rover on entend une base roulante sur laquelle j'integrerai progressivement des composants oui c'est ce que j'ai envie de faire. Pourquoi ?
#88057 Wall Pi
Posté par
sur 27 septembre 2017 - 05:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je vais modéliser sous solidworks ^^ de tous les soft Cao que j'ai eu sous la main c'est de loin le plus agréable et c'est totalement dans ses cordes
Pour le mapping, j'ai aucune idée de ce que sa représente ^^
C'est plus un souhait de neophyte ^^ par exemple je sais pertinamment qu'un bras à 6 degrés de libertés c'est des heures de calculs avant de pondre les règles ^^ du coup c'est pour plus tard xD (dieux merci j'ai gardé mes cours de robotique )
Je ne manquerai pas de jeter un oeil à son projet
Pour le mapping, j'ai aucune idée de ce que sa représente ^^
C'est plus un souhait de neophyte ^^ par exemple je sais pertinamment qu'un bras à 6 degrés de libertés c'est des heures de calculs avant de pondre les règles ^^ du coup c'est pour plus tard xD (dieux merci j'ai gardé mes cours de robotique
)Je ne manquerai pas de jeter un oeil à son projet
#88108 Wall Pi
Posté par
sur 28 septembre 2017 - 01:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Justement, je suis en train de le lire. Et c'est effectivement excellent et surtout très agréable à lire. Je vais méditer là dessus.
De prime abord une solution pour l'odométrie serait d'utiliser un capteur optique de souris positionné au centre de rotation du robot et un 2e positionné à une distance suffisamment lointaine pour mesurer précisément les angles. Après pour le soft, il suffit de faire une table, chaque cellule du tableau représentant une portion y*y cm avec une valeur TOR dedans.
Je sens que ça va être drôle tout ça ^^
#88111 Wall Pi
Posté par
sur 28 septembre 2017 - 03:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
L'idée de la souris sans fil, c'est pas mal.
Tu pourrais dessiner le chemin parcouru sur l'écran de ton PC.
Pour les émetteur radios, tu pourrais prendre RTL, Europe1, France-Inter en grandes ondes. Et faire tourner une antenne. Avec un peu de chance, il se pourrait qu'ils émettent à partir de positions très différentes. Pour la précision, j'ai un doute.
Mais est ce qu'ils émettent encore ?
Après un peu de lecture, je pense que je vais partir sur un système a définir (aimant a effet hall, capteur photosensible) fixé sur une roue de grande taille sur les essieux moteurs. Ca me permettra de faire de l'odométrie. Je complèterai plus tard avec 2 capteurs de souris. La solution me parait intéressante et carrément élégante, mais j'ai un doute en fonction de la surface utilisée ^^
Du coup plus besoin de positionnement par balise. En y pensant, je suis a moins de 5 km d'un aérodrome, faudrait voir si je peux me caler sur leur balise... A noter dans les idées ^^
#88978 Wall Pi
Posté par
sur 18 octobre 2017 - 10:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Effectivement ça serait hyper intéressant.
Je peux fournir une liste de ce que j'aurais besoin si je voulais commander demain ^^ vu que je pars de zéro niveau matos ^^
#88959 Wall Pi
Posté par
sur 18 octobre 2017 - 07:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
@Amhnemus j'ai vu un kit elegoo sacrément complet avec une arduino mega, tu penses que c'est une bonne idée de partir sur cette carte ?
#88151 Wall Pi
Posté par
sur 29 septembre 2017 - 11:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
Petit avancement du projet, voici le schéma de principe du robot :
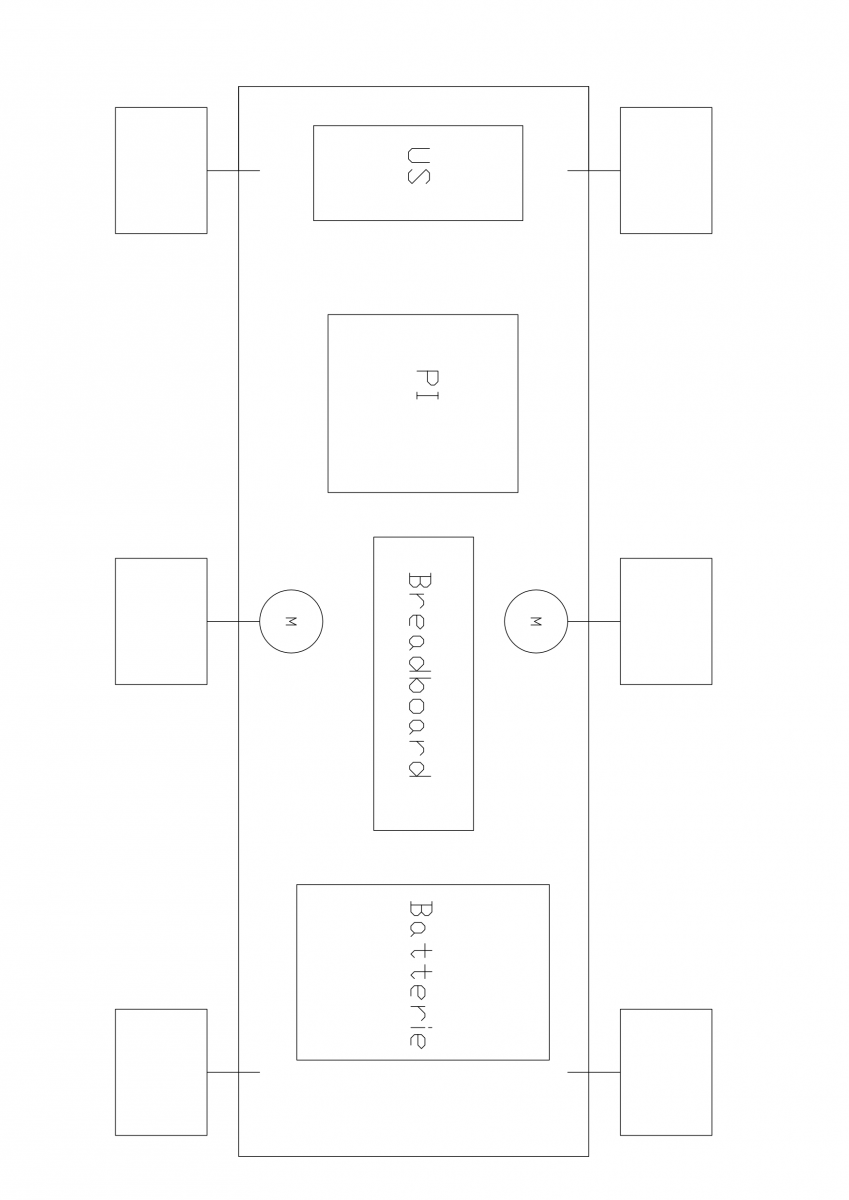
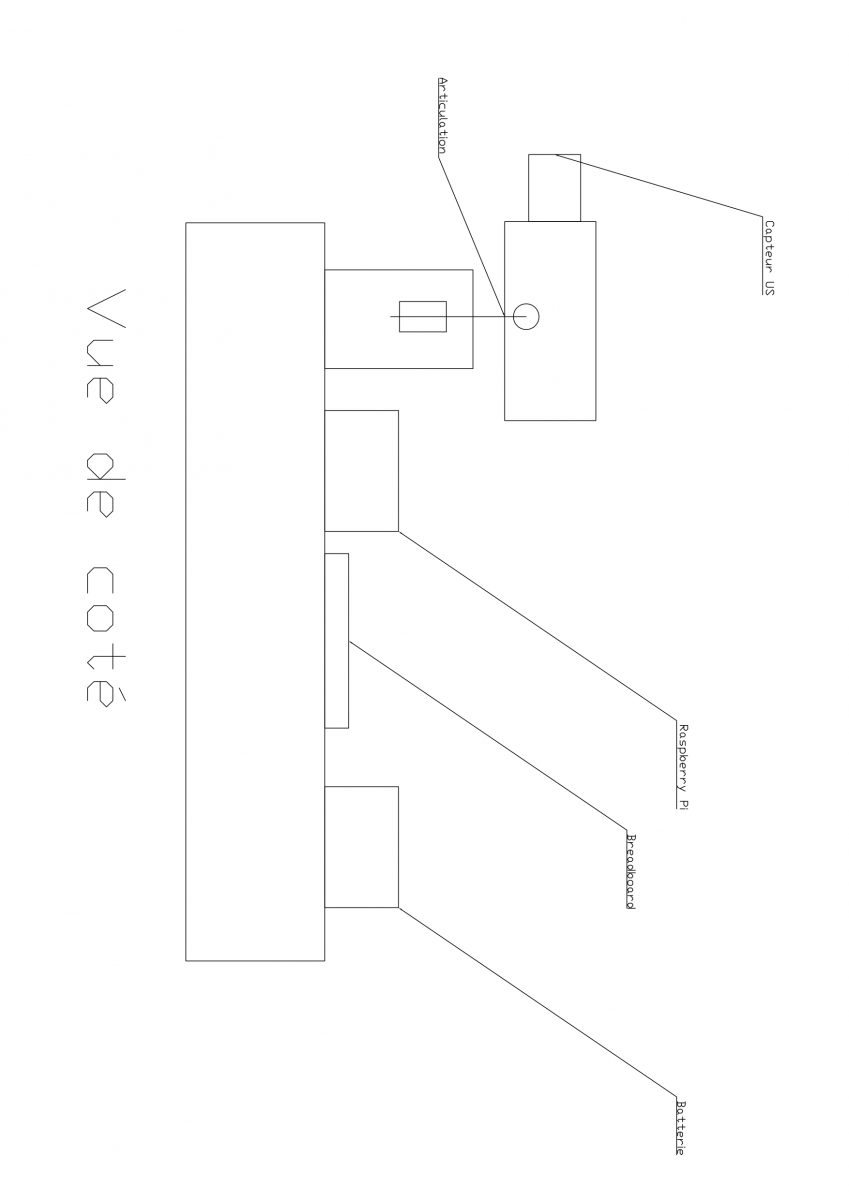
Bien entendu le schéma n'est pas à l'échelle.
Par contre, plus j'avance dans la conception, plus je me rend compte que j'ai oublié beaucoup, beaucoup de choses depuis l'école. Et elle est pas si loin que ça xD
#88130 Wall Pi
Posté par
sur 28 septembre 2017 - 09:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est pas faux ^^ mais comme je compte utiliser du lego pour tout ce qui est transmission j'ai des gros doute sur l'erreur que je vais récupérer avec tous les jeux que ça va représenter sur la chaine de cote...
En meme temps pour prototype je survivrais largement à cette incertitude ^^ tu marques un gros point
En meme temps pour prototype je survivrais largement à cette incertitude ^^ tu marques un gros point
#88050 Wall Pi
Posté par
sur 27 septembre 2017 - 03:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Voici la présentation de mon avant avant projet ^^
Je vais essayer ici d'exposer les raisons de la création de ce projet.
Pour ceux qui n'ont pas lu ma présentation, je suis ingénieur en mécanique et production depuis quelques années. Malheureusement mon métier ne me permet plus de faire de la conception et ça me manque. J'ai aussi envie de mettre en avant et pourquoi pas de transmettre les méthodes que j'emploierai. J'ai vu pas mal de TPE et de PPE ici, c'est l'occasion de fournir des documents en exemple
Je me débrouille plutôt bien en conception mécanique, j'ai des notions en C et C++ (très basique et un peu lointaine les notions) et je m'y connais en VBA. Niveau élec par contre je suis une bille (vous savez celui qui comate contre le radiateur au fond, et bah c'était moi en élec ^^).
Au niveau du matos dispo j'ai un crayon et du papier (INDISPENSABLE !) quelques LEGO, une raspberry pi et une imprimante 3D ^^
Bon ceci étant dis, voici mes objectifs :
1) M'amuser !
2) M'amuser !
3) M'éclater sur un projet de conception
4) Éventuellement transmettre un savoir (mais on verra, je préfère rester humble)
Une contrainte s'ajoute au projet, madame veut que le robot soit utile ^^ pourquoi pas par exemple avoir un balais swiffer. Je cite "quitte a avoir ta connerie pleine de fils qui se balade dans le salon autant qu'il fasse le ménage en même temps" c'était de l'humour mais le message est passé quand même =)
Voilà comment je vois le projet. Je veux faire un rover parce que soyons honnête c'est plus simple qu'un bipède ^^
Et je veux y aller par étapes histoire de pas me décourager en partant tout de suite sur un truc énorme, incroyablement complexe.
Idéalement je veux faire un rover avec 2 bras - 6 axes et de l'intelligence à revendre. Pourquoi pas un joueur d'échec d'ailleurs...
J'ai déjà définis les 3 première étapes :
Phase 1 :
L’objectif de la phase 1 est simple : concevoir et faire fonctionner une base roulante modulaire. A ce stade du projet, le rover sera capable de suivre une série de commande prédéfinie. Il n’aura aucune intelligence particulière. Va devant, demi-tour, recommence, arrête toi.
De plus, je souhaiterai avoir un semblant d’interface pour pouvoir piloter les fonctions basiques via le contrôle à distance de la raspberry Pi.
Nota : Cette première phase devra prendre en compte le balais pour nettoyer l’appartement.
Phase 2 :
L’objectif de la phase 2 est de mettre en place un système anti-collision basique qui permettra à notre rover de s’arrêter face à un obstacle.
A ce stade le rover ne devrait plus se retrouver bloqué par des obstacles.
Phase 3 :
L’objectif de la phase 3 est de développer un algorithme de mapping de l’appartement et une routine qui permettra de vérifier régulièrement l’état de l’appartement et de mettre à jour la carte.
Le second objectif est de développer une routine de nettoyage de l’appartement ou le rover nettoiera de lui même l’appart en suivant un algo lui permettant de ne rien louper.
Concernant les premières contraintes techniques, je souhaite faire un hybride entre de l'impression 3D et du Lego. Je trouve que les composants avancés des lego technic (vérin, amortisseur, pompe, jeux d'engrenages) sont carrément efficace et pour un coût impressionnant.
Et surtout la prochaine étape sera de faire un diagramme FAST en ne me limitant pas à ces 3 phases mais en y mettant littéralement tout ce qui me passe par la tête.
Voilà pour le projet. N'hésitez pas à me faire part de vos commentaires. Je suis totalement ouvert à la critique ^^
Dites moi surtout ce que vous pensez de la démarche ?




