Je m'incruste dans le sujet. Est-ce que ces boussoles sont "précises" ? Faut-il régulièrement les "calibrer" (le fameux 8 à reproduire en mouvement comme avec son téléphone) ? Je m'y intéresse pour l'odométrie.
Contenu de Guacam
Il y a 10 élément(s) pour Guacam (recherche limitée depuis 05-mai 13)
Par type de contenu
Voir pour ce membre
#101416 Détecter le nord
 Posté par
sur 11 janvier 2019 - 03:27
dans
Electronique
Posté par
sur 11 janvier 2019 - 03:27
dans
Electronique
#101344 Je me lance !
Posté par
sur 09 janvier 2019 - 01:38
dans
Et si vous vous présentiez?
Hello les makers, je suis tombé un peu par hasard sur ce forum et votre communauté m'a l'air bien sympathique alors me voici 
Que dire sur moi... J'ai 30 ans, je vis à Nice et je suis développeur web. J'ai toujours travaillé dans l'informatique mais dans différentes branches et de différentes manières (salarié, entrepreneur). J'ai débuté comme webmaster, j'ai bifurqué dans le domaine de la sécurité info, le marketing web et ces dernières années j'ai bossé pour diverses startups en tant que dev full stack js.
Je m'intéresse depuis peu à la robotique, j'expérimente beaucoup de choses (programmation sur Arduino, Raspberry, servomoteurs, différents capteurs etc). J'ai actuellement un projet de petit robot quadripède combinant reconnaissance d'objets, commandes vocales et SLAM qui me tient à coeur. D'ailleurs je galère pas mal sur SLAM avec un Rplidar A1 (mais ça fera très probablement l'objet d'un topic de ma part !).
Bref, je vous dis à bientôt sur le forum !
#101357 Je me lance !
Posté par
sur 09 janvier 2019 - 06:17
dans
Et si vous vous présentiez?
Boston Dynamics est certainement une référence pour beaucoup d'entre-nous 
Merci Path !
Merci Path !
#101348 Je me lance !
Posté par
sur 09 janvier 2019 - 02:21
dans
Et si vous vous présentiez?
Merci pour l'accueil
@Oracid: Beau résultat ! J'avais envisagé un modèle spider et puis finalement je me suis orienté vers quelque chose de plus "mammifère". J'aimerai également par la suite traiter la problématique des marches à monter et peut-être utiliser un gyro pour gérer l'équilibre.
#101373 SLAM et lidar
Posté par
sur 10 janvier 2019 - 10:19
dans
Programmation
Thanks, je vais jeter un oeil à tout ça (oui il faudra que je vous prépare un post pour vous présenter mon projet en détail !)
#101365 SLAM et lidar
Posté par
sur 09 janvier 2019 - 10:50
dans
Programmation
Je vais jeter un oeil sur ces algo
Pour la visualisation à la limite je peux me coder un truc, passer par le web c'est effectivement une bonne idée !
Sans indiscrétion vous utilisez quoi pour faire le mapping et l'odométrie ? Sachant que je n'utilise pas de roues (robot quadripède) je me demandais si coupler gyro/accéléromètre pouvait être assez fiable.
#101368 SLAM et lidar
Posté par
sur 10 janvier 2019 - 07:56
dans
Programmation
Très bonne idée le stabilisateur, je n'y avais pas du tout pensé mais c'est vrai qu'en mouvement j'aurais un changement de hauteur sans ça pendant le scan.
C'est certain qu'il faut découper le problème en différentes étapes, j'avance actuellement sur plusieurs problématiques à la fois. Pour résumer très succinctement j'ai un Raspberry Pi B3+ avec un ReSpeaker 2-mic hat, une Raspberry Pi v2 caméra et le rplidar A1. Le Raspberry est branché à un Arduino Uno, sur lequel j'ai un 16 PWM channel I2C FET Arduino shield PCA9685 et divers capteurs. Sur le PCA9685 j'ai 12 micro-servos (afin de faire des tests sur le mouvement et prendre par la suite des servos plus puissants - j'utilise d'ailleurs du carton-plume pour faire mes essais). Voilà pour la partie hardware. Sur l'Arduino j'ai mis la lib Firmata afin de pouvoir facilement communiquer avec le Raspberry. Sur mon RPi j'ai un environnement Python, j'utilise snips.ai pour la gestion de la voix (et synthèse vocale), OpenCV pour le processing de l'image (faire du tracking de visage etc). A l'heure actuelle j'arrive à contrôler les servos, j'expérimente beaucoup de choses pour gérer la marche quadrupède de la manière la plus efficiente possible à mon niveau, je gère diverses commandes vocales via snips, quelques reconnaissances visuelles et je suis surtout bloqué avec le lidar.
Je ne sais pas quoi utiliser pour le mapping. Je pense que c'est au-delà de mes capacités de coder ma propre solution de mapping via le lidar (en particulier la partie consistant à détecter les points communs à deux scans). Du coup je cherche une lib faisant ça pour ne pas perdre trop de temps sur cette problématique mais je suis un peu perdu.
#101361 SLAM et lidar
Posté par
sur 09 janvier 2019 - 08:28
dans
Programmation
Yo, j'essaye de faire de la localisation et du mapping à l'aide d'un rplidar A1 connecté en USB à un Raspberry Pi 3. J'utilise dans mon projet actuel le langage Python. Je précise que je ne passe pas par ROS (j'ai essayé et je ne suis vraiment pas fan), j'ai juste Raspbian d'installé, qui fait ensuite tourner différentes lib dont j'ai besoin. Je parviens à me connecter au lidar et récupérer des mesures mais c'est dans leur traitement que je rencontre des difficultées.
Tout d'abord j'ai cherché une lib pour faire du SLAM via un lidar en Python, je suis tombé sur BreezySLAM <https://github.com/s...levy/BreezySLAM> qui semble pas trop mal mais je galère à le faire fonctionner. En outre j'aimerai bien visualiser les données du lidar (par exemple avec <https://github.com/s...dlevy/PyRoboViz>) mais je n'ai pas d'interface sur mon raspberry, je fais tout en ligne de commande. J'imagine qu'il y a moyen d'installer un outil de visualisation sur mon ordinateur (je suis sous macOS) et de le connecter via le réseau local au Raspberry. Ensuite je ne sais pas si BreezySLAM peut faire du path planning. Au pire ce n'est pas la partie la plus complexe, par le passé j'avais fait un algorithme génétique pour déterminer le trajet le plus court dans un environnement 2D. Mais s'il y a une solution plus efficiente (et j'imagine qu'il y en a) je suis preneur. Bref si vous avez des pistes pour faire du mapping et visualiser en temps réel le résultat, ça serait top, peu importe le langage tant que ça ne nécessite pas l'utilisation de ROS.
#101494 Un autre quadrupède
Posté par
sur 14 janvier 2019 - 08:41
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
La partie commande vocale est plutôt "simple" en utilisant le framework que je cite, j'ai réutilisé les mêmes composants que ceux de leur dev kit afin d'aller plus vite. Sinon si on veut faire du NLP un peu plus en profondeur il y a ça qui est pas mal : https://spacy.io/- mais ça ne gère pas la synthèse vocale, il faudra installer une solution tierce.
Pourquoi faire tout simultanément ? En fait j'alterne sur plusieurs problématiques. Quand je bloque sur l'une (en attente du matériel ou des informations), ou que j'ai passé un peu trop de temps sur quelque chose et que j'ai une vision trop centrée dessus, je bosse sur un autre aspect et ainsi de suite. C'est une manière de fonctionner qui marche bien pour moi.
"quand tu auras résolu le mécanisme de la marche, tu auras déjà fait un grand pas" c'est le cas de le dire
#101465 Un autre quadrupède
Posté par
sur 13 janvier 2019 - 06:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hello, j'ouvre ce topic afin de vous présenter mon projet de quadrupède. J'aimerai réaliser un robot de ce type capable de se déplacer de manière autonome et interagir (à moindre mesure) avec son environnement. Je souhaite pouvoir le contrôler via la voix et faire du tracking de personnes (suivre quelqu'un).
L'architecture du robot est découpée grosso modo en deux parties :
La partie "intelligence" est gérée via une Raspberry Pi 3 sur laquelle j'ai installé Raspbian et un environnement Python. J'utilise un ReSpeaker 2-Mics Pi Hat pour l'input/output du son (commandes vocales) avec Snips.ai. J'ai une Raspberry Pi v2 caméra pour la reconnaissance visuelle (OpenCV) et un rplidar A1 pour la navigation.
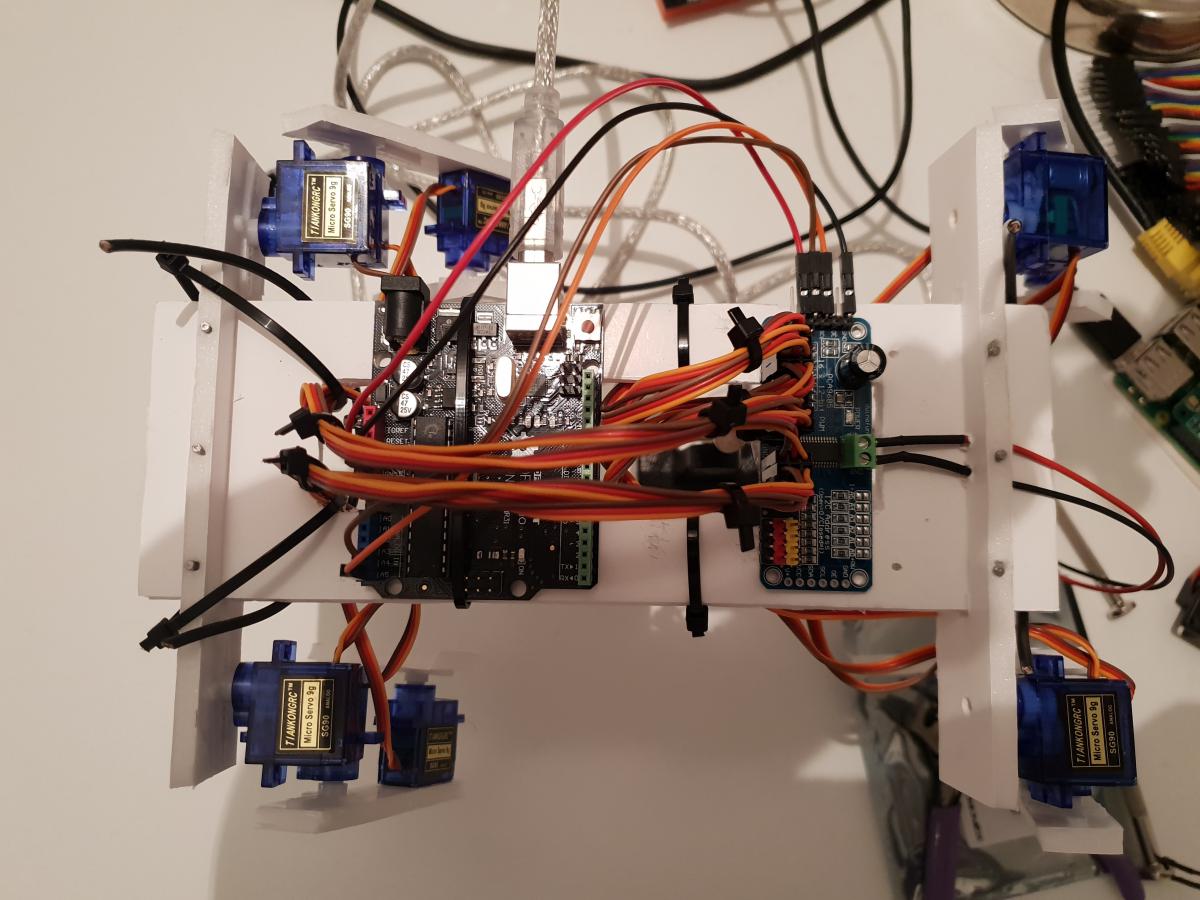
La partie mécanique est gérée via une Arduino Uno. La carte reçoit directement les commandes via la Raspberry Pi (Firmata). Une carte PCA9685 branchée à l'Arduino me permet de gérer l'ensemble des servos.
En ce moment j'étudie différentes manières de gérer la marche quadrupède. Pour cela j'ai créé une maquette de mon robot à échelle réduite avec 12 micro-servos, du carton-plume et pas mal de super-glue :
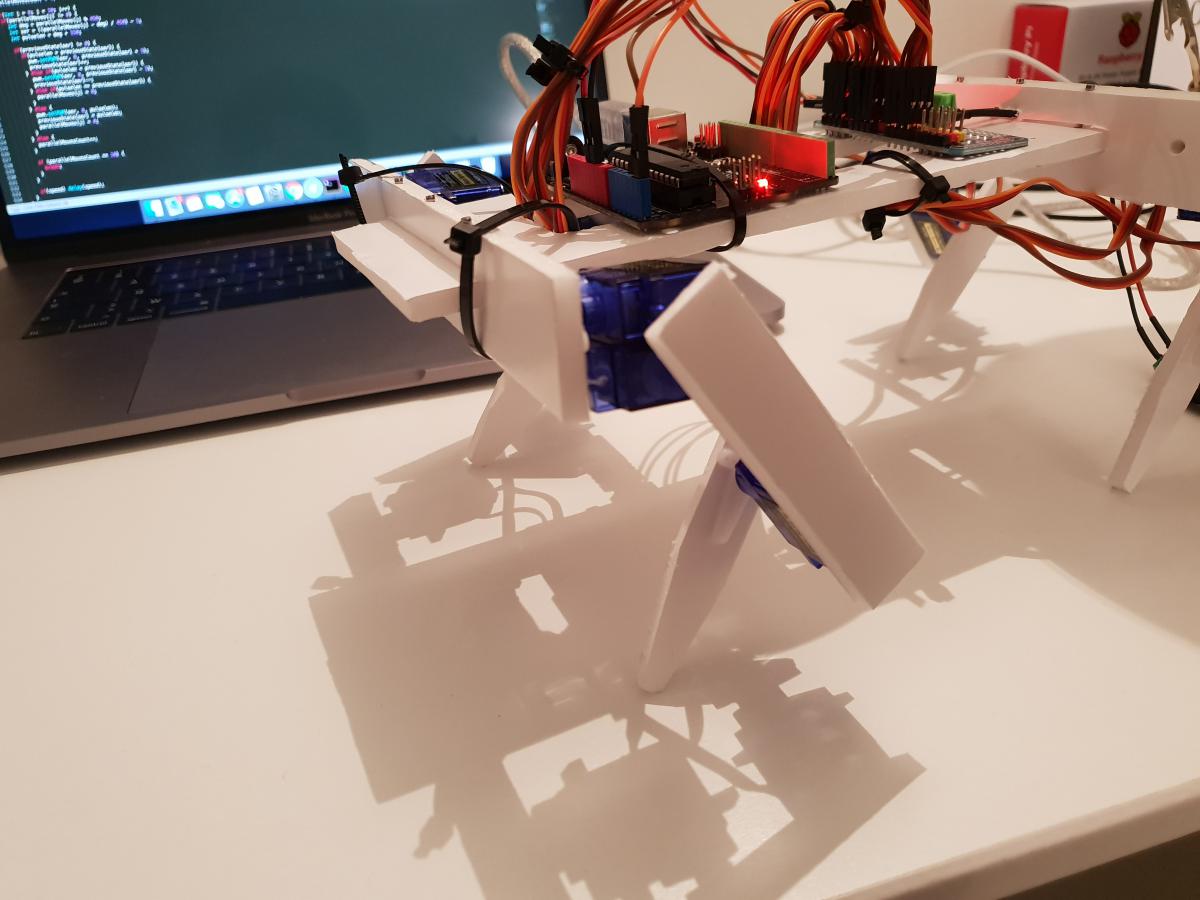
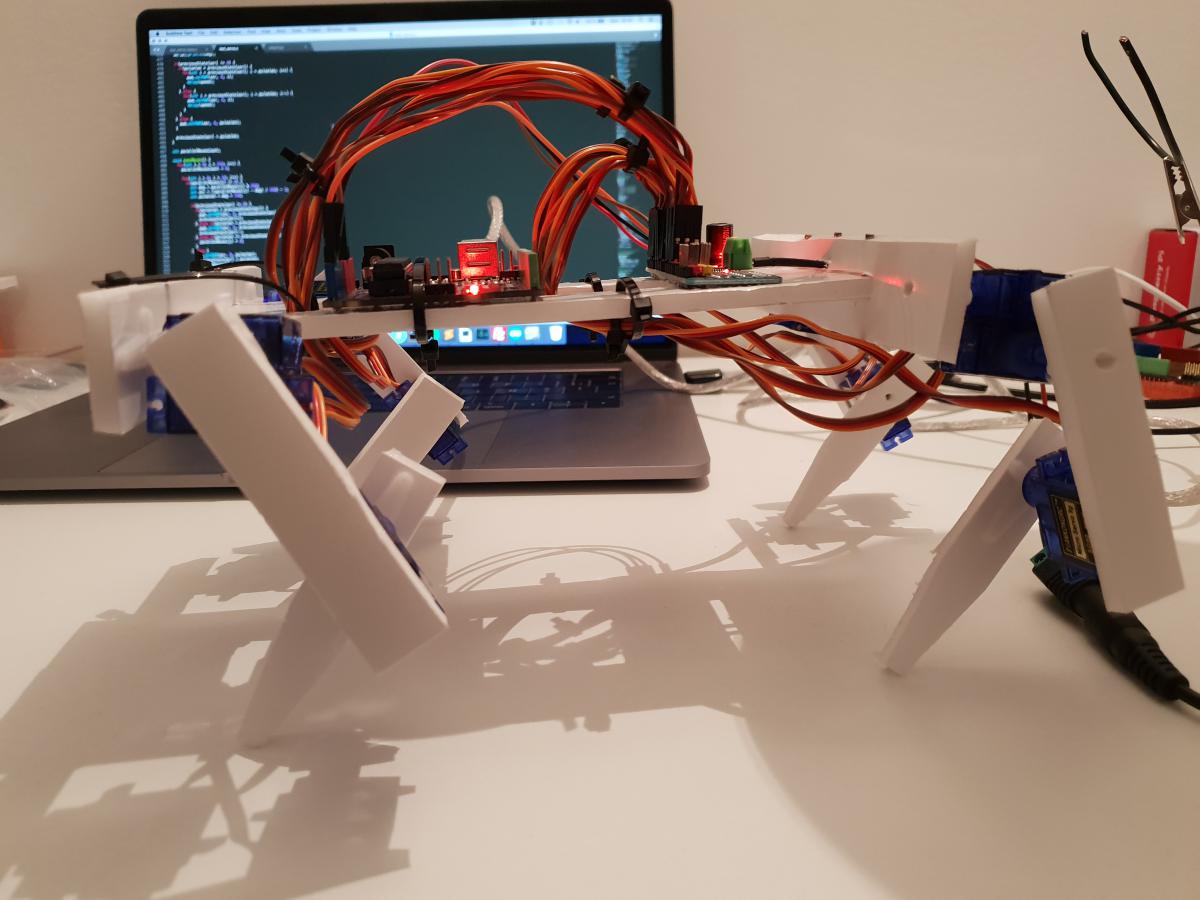
Dès que j'aurai un résultat satisfaisant je ferai une petite vidéo




