Posté par
Posté par
Très bonne idée le stabilisateur, je n'y avais pas du tout pensé mais c'est vrai qu'en mouvement j'aurais un changement de hauteur sans ça pendant le scan.
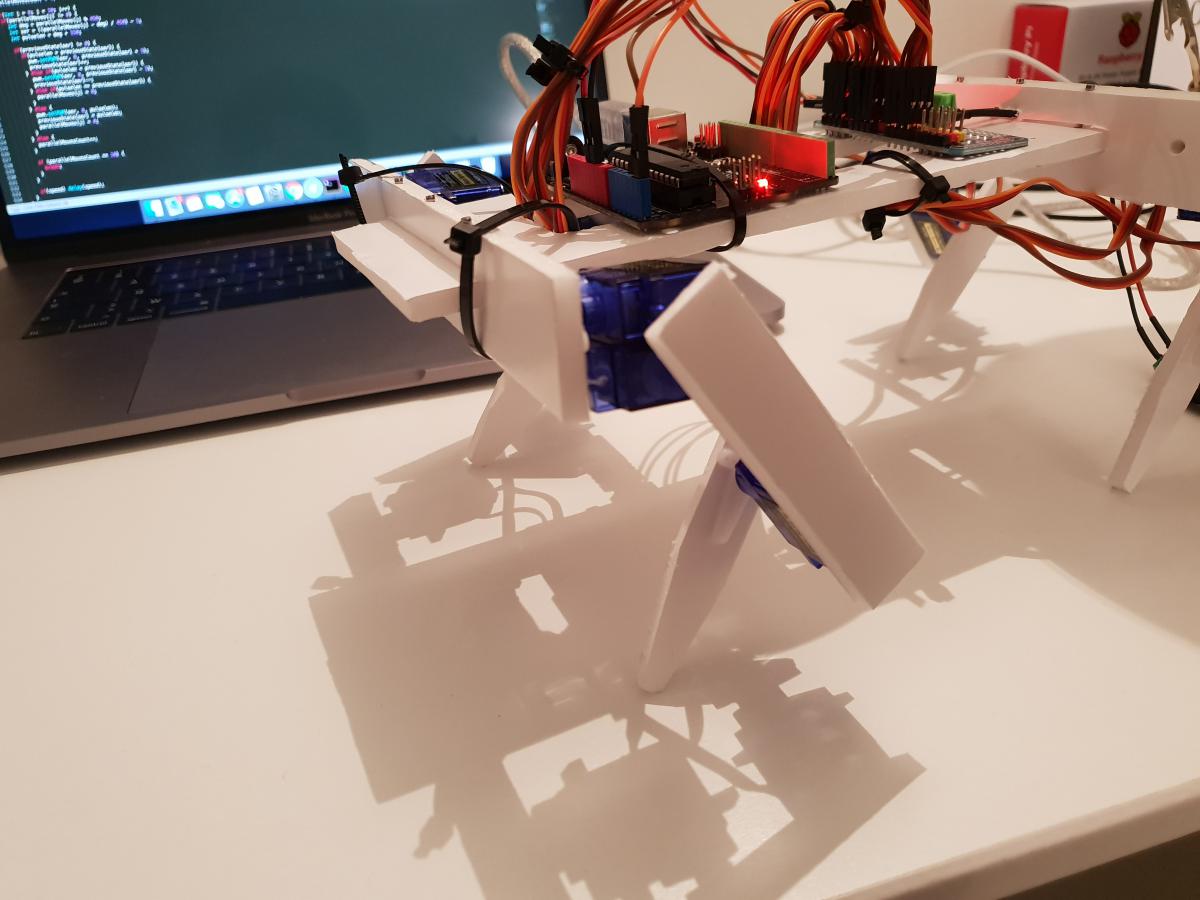
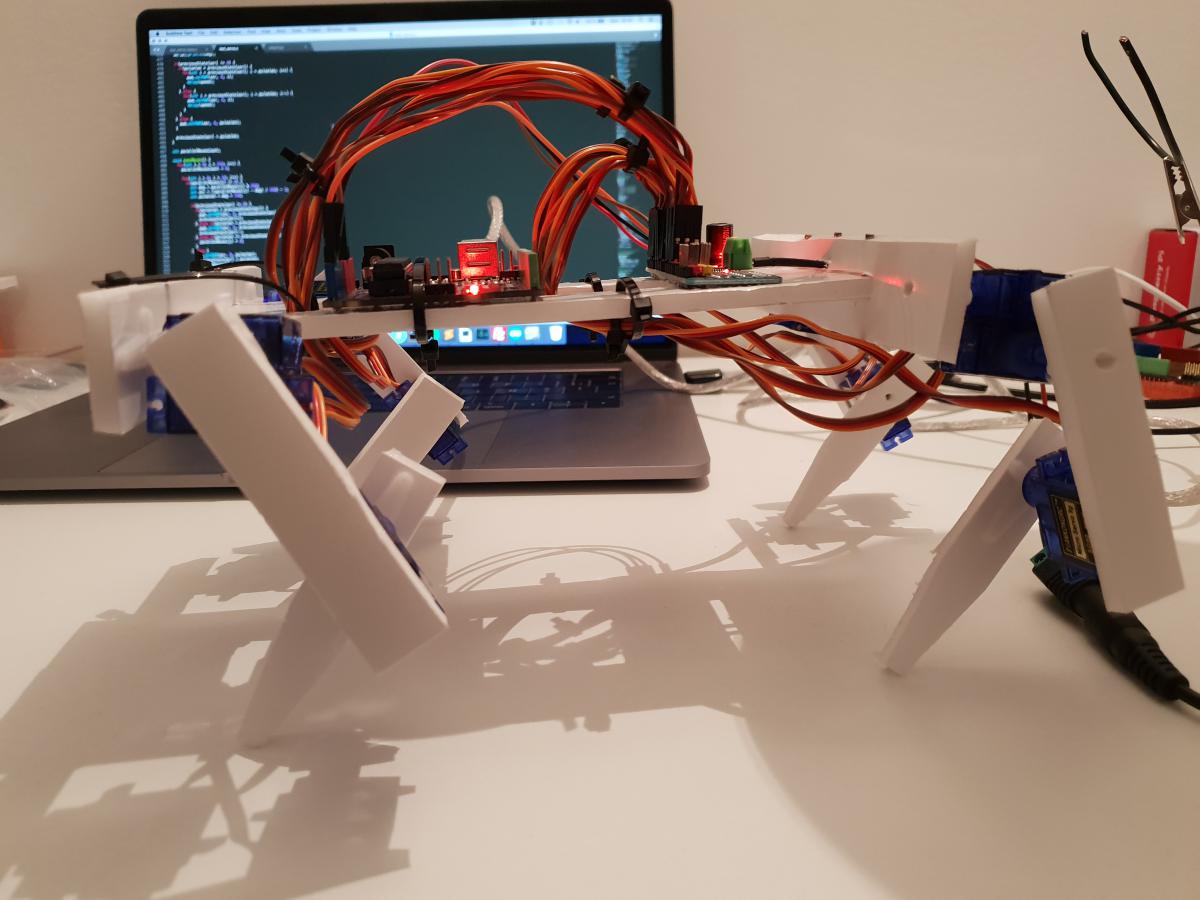
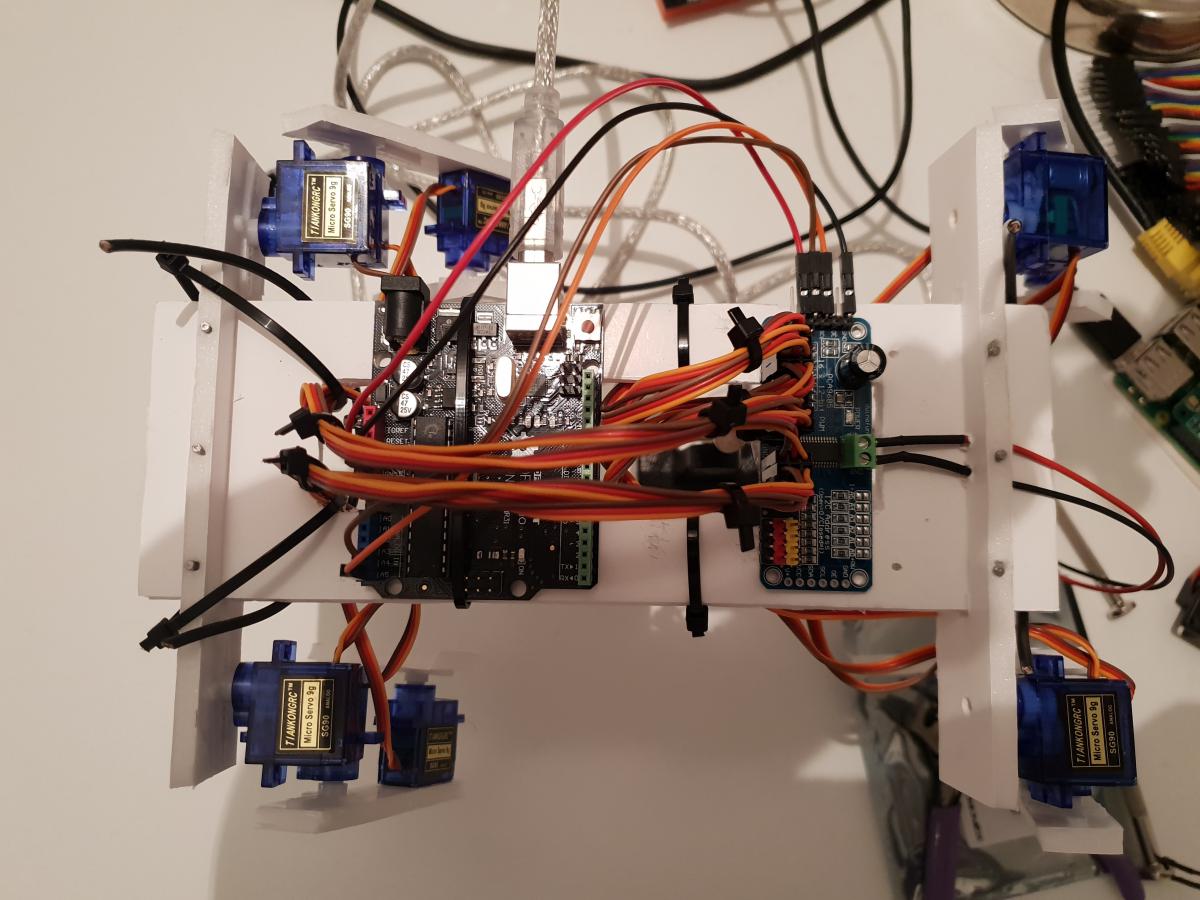
C'est certain qu'il faut découper le problème en différentes étapes, j'avance actuellement sur plusieurs problématiques à la fois. Pour résumer très succinctement j'ai un Raspberry Pi B3+ avec un ReSpeaker 2-mic hat, une Raspberry Pi v2 caméra et le rplidar A1. Le Raspberry est branché à un Arduino Uno, sur lequel j'ai un 16 PWM channel I2C FET Arduino shield PCA9685 et divers capteurs. Sur le PCA9685 j'ai 12 micro-servos (afin de faire des tests sur le mouvement et prendre par la suite des servos plus puissants - j'utilise d'ailleurs du carton-plume pour faire mes essais). Voilà pour la partie hardware. Sur l'Arduino j'ai mis la lib Firmata afin de pouvoir facilement communiquer avec le Raspberry. Sur mon RPi j'ai un environnement Python, j'utilise snips.ai pour la gestion de la voix (et synthèse vocale), OpenCV pour le processing de l'image (faire du tracking de visage etc). A l'heure actuelle j'arrive à contrôler les servos, j'expérimente beaucoup de choses pour gérer la marche quadrupède de la manière la plus efficiente possible à mon niveau, je gère diverses commandes vocales via snips, quelques reconnaissances visuelles et je suis surtout bloqué avec le lidar.
Je ne sais pas quoi utiliser pour le mapping. Je pense que c'est au-delà de mes capacités de coder ma propre solution de mapping via le lidar (en particulier la partie consistant à détecter les points communs à deux scans). Du coup je cherche une lib faisant ça pour ne pas perdre trop de temps sur cette problématique mais je suis un peu perdu.