Centrale Lille... Je connais bien. j'ai souvent des stagiaires de Centrale Lille :-) ... Bienvenue à toi... 日本語を話せますか?
Contenu de jfortias
Il y a 48 élément(s) pour jfortias (recherche limitée depuis 23-mai 13)
Par type de contenu
Voir pour ce membre
#98557 Présentation Ira
 Posté par
sur 21 août 2018 - 06:07
dans
Et si vous vous présentiez?
Posté par
sur 21 août 2018 - 06:07
dans
Et si vous vous présentiez?
#97500 mon lab
Posté par
sur 18 juillet 2018 - 07:47
dans
Galeries photo
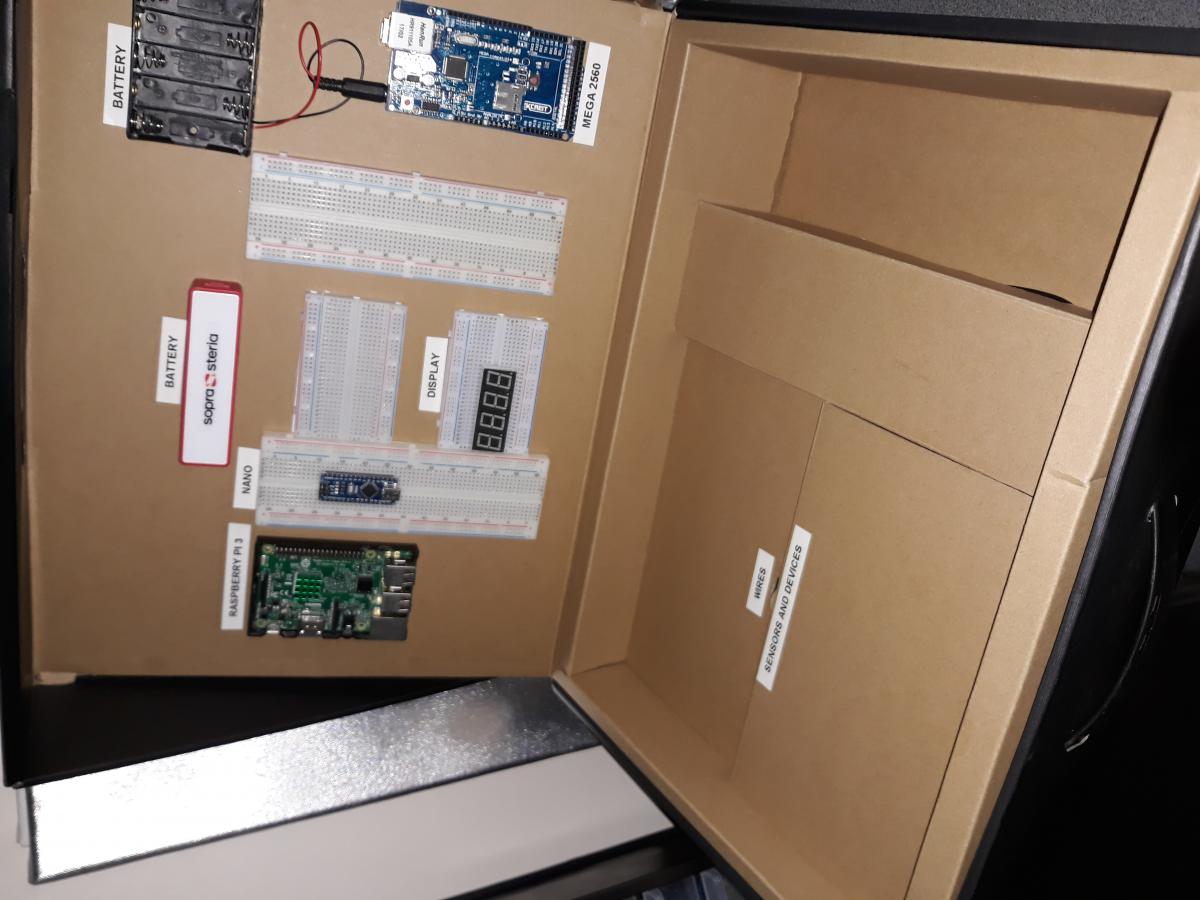
Deux malettes IoT pour les formations ou les démos
Image(s) jointe(s)

#97502 mon lab
Posté par
sur 18 juillet 2018 - 07:51
dans
Galeries photo
#97499 mon lab
Posté par
sur 18 juillet 2018 - 07:46
dans
Galeries photo
Voila quelques photos de mon "lab"
Ma machine : Un cluster de 5 PC : Pour chacun, 32 Go RAM, 1 To HD, i7, 1024 cuda core fonctionnant sous Xubuntu et Windows. dev en c#, java, python
Image(s) jointe(s)

#97516 mon lab
Posté par
sur 18 juillet 2018 - 08:55
dans
Galeries photo
Mike c'est assez logique : le pattern agent multi agent est de loin le plus performant. Sauf que perso je ne fais pas dans le cloud je reste en réseau local... mais on est d'accord : merci pour le lien je vais regarder
#97501 mon lab
Posté par
sur 18 juillet 2018 - 07:49
dans
Galeries photo
Une armoire Légo+IoT
Image(s) jointe(s)



#97511 mon lab
Posté par
sur 18 juillet 2018 - 08:19
dans
Galeries photo
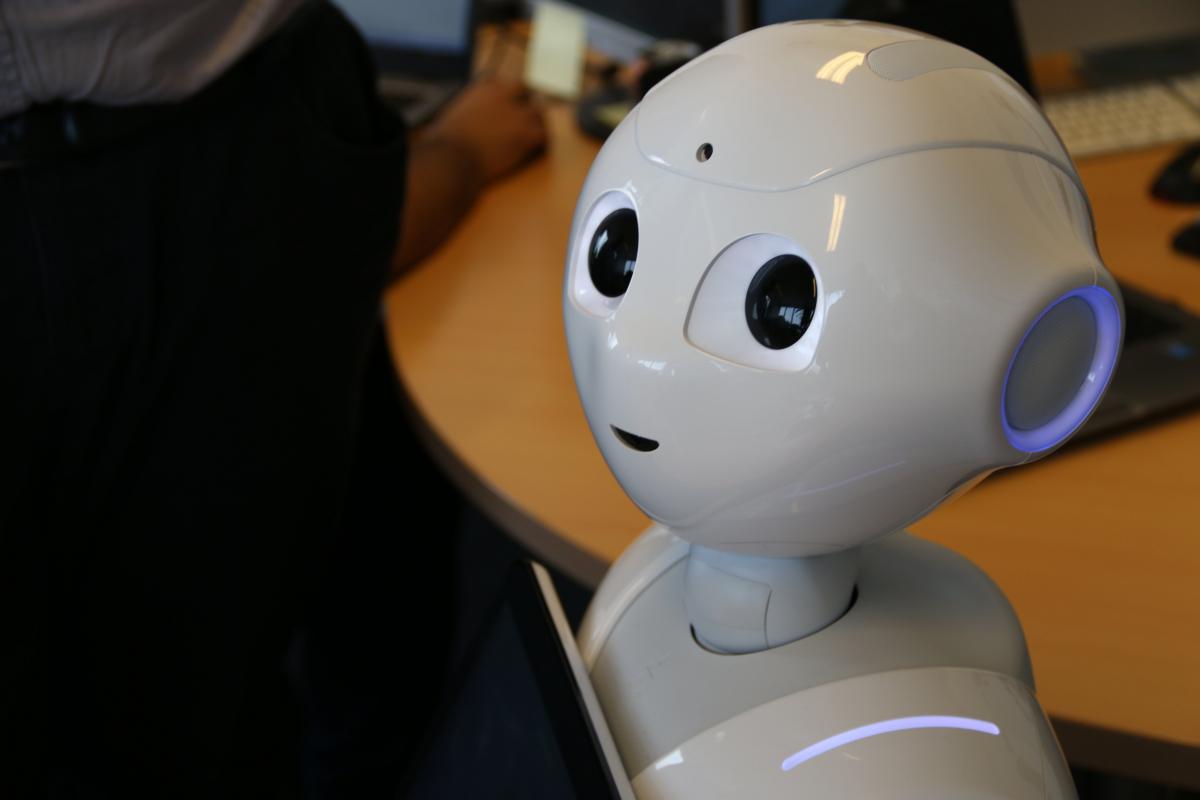
Larti c'est assez simple : autant pour Pepper que pour les robots, j'ai un principe j'applique de l'intelligence distribuée. En résumé le robot a une intelligence limitée d'autonomie courte de survie, mais tous les comportements évolués sont déportés sur les grosses machines. Ainsi sur Pepper on a hacké le module de dialogue, et la webcam... Il me reste la reco vocal qui est pas assez bonne sur pepper.
#97504 mon lab
Posté par
sur 18 juillet 2018 - 07:53
dans
Galeries photo
Un robot Pepper
Image(s) jointe(s)

#98376 mon lab
Posté par
sur 15 août 2018 - 06:02
dans
Galeries photo
Cadre totalement pro. J'ai créé un lab IA pour le groupe Sopra Steria... Là je pars monter une nouvelle équipe pour une autre boite...
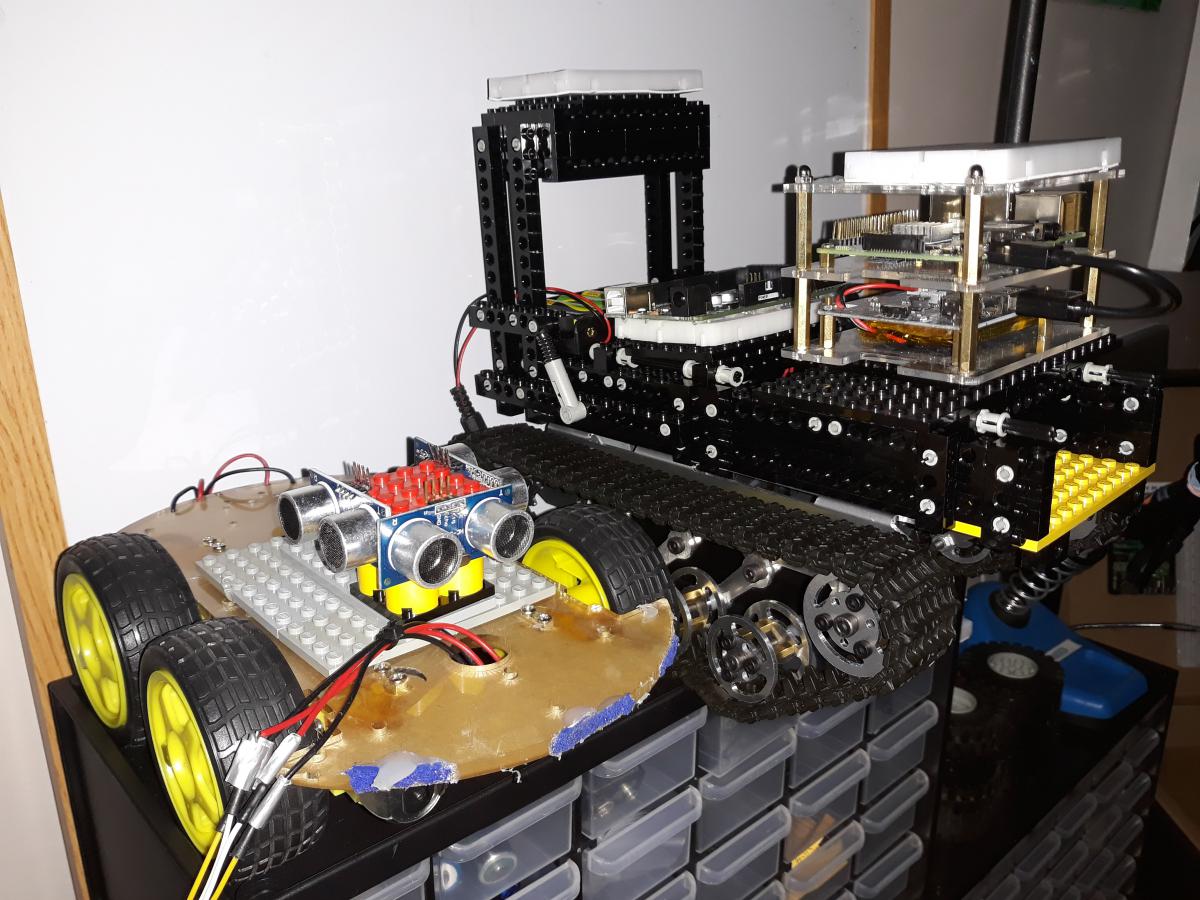
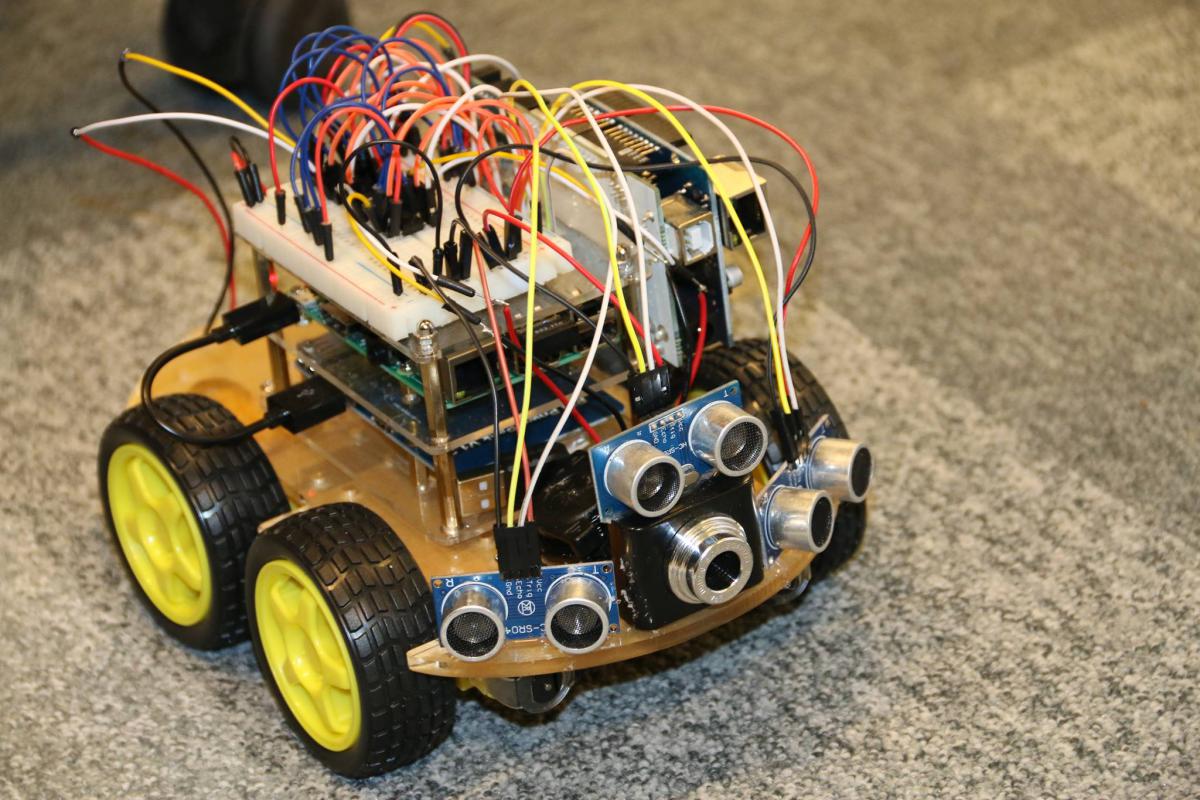
#97489 Medor, mon robot Roulant
Posté par
sur 17 juillet 2018 - 07:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
Une vidéo de mon robot sur base de RaspBerry pi l'arduino n'était pas connecté
#97554 Medor, mon robot Roulant
Posté par
sur 19 juillet 2018 - 10:12
dans
Robots roulants, chars à chenilles et autres machines sur roues
Arobasseb oui et non... Il est pilotable à distance ou autonome ou les deux... En résumé l'opérateur lui donne une direction type et il se démerde... Mais je ne suis pas au niveau que j'aimerais. là au niveau algo on est au niveau d'une tondeuse... en gros des algo qui 20-30 ans
#97555 Medor, mon robot Roulant
Posté par
sur 19 juillet 2018 - 10:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
promis la prochaine version, je mettrais les sources...
#98553 Ma présence peut vous faire de l'ombre
Posté par
sur 21 août 2018 - 03:09
dans
Et si vous vous présentiez?
Bienvenue à toi jeune badawannne :-) Alors Yoda c'est Oracid, pour info
#97508 Lucie Pepper
Posté par
sur 18 juillet 2018 - 08:01
dans
Contenu vidéo
de toute manière quittant mon actuel poste je dois remonter les vidéos.... et réorganiser cela :-) ....
#97507 Lucie Pepper
Posté par
sur 18 juillet 2018 - 08:00
dans
Contenu vidéo
je sais ! je suis nul pour ce genre de truc.... le pire c'est que je ne sais même pas quoi te répondre. Je vais voir cela...merci
#97488 Lucie Pepper
Posté par
sur 17 juillet 2018 - 07:55
dans
Contenu vidéo
Bonjour je vous présente la chaine que j'ai créé avec mon robot Pepper ... la présentation est là
et la page d'accueil est là https://www.youtube....9JuURK2A/videos
et la page d'accueil est là https://www.youtube....9JuURK2A/videos
Image(s) jointe(s)
#99901 Lucie Pepper
Posté par
sur 07 novembre 2018 - 04:06
dans
Contenu vidéo
désolé je suis en train de boucler un projet open source sous licence MIT
#98559 Hello !
Posté par
sur 21 août 2018 - 06:34
dans
Et si vous vous présentiez?
Bienvenue ... il y'a ici aussi des pros (comme moi, je fais de l'IA) que des génies :-) que mon maitre youtuber préféré (je sais je cire des pompes) ou encore des amateurs passionnants... Mais ce sera avec plaisir que je t'aiderais si besoin autant que je peux...
#98544 Hacking moteur légo
Posté par
sur 21 août 2018 - 10:38
dans
Lego
Bonjour
J'ai reçu plusieurs moteurs légo
leur connecteur est une brique plate a 4 points de contacts, avec 4 contacts électrique
Je cherche à remplacer ce connecteur pour brancher cela directement à un arduino ou un raspberry pi ...
Quelqu'un sait il ou je peux trouver des infos sur ces contacts ?
#98550 Hacking moteur légo
Posté par
sur 21 août 2018 - 02:11
dans
Lego
Merci à toi :-)
#100080 Gato, mon petit quadrupède
Posté par
sur 12 novembre 2018 - 04:02
dans
Lego
Yes... mais pour améliorer il faut une masse pour créer un couple inertiel ....
Je pense que tu parles de ça, https://www.brocante...nt=All Products

#97542 Gato, mon petit quadrupède
Posté par
sur 18 juillet 2018 - 09:36
dans
Lego
euh .... c'est un servo + colle + plaque légo... Cela marche mais c'est dégueu... mais je vais en refaire un propre et ok je montre et je fais cela pour tous mes IoT... Puisque j'utilise pas de Lego Mind
#100072 Gato, mon petit quadrupède
Posté par
sur 12 novembre 2018 - 01:57
dans
Lego
bah les voitures à pédales de mon enfance faisait cela... tu pousses sur les pédales, l'inertie fait passer le point en bout de course ....
#100067 Gato, mon petit quadrupède
Posté par
sur 12 novembre 2018 - 10:06
dans
Lego
le truc qui m'intéresse c'est la transformation d'une rotation en mouvement alternatif... tu es des sources pour cela ? des plans ? des vidéos ? pour comparer les différentes approches
#102130 Gato, mon petit quadrupède
Posté par
sur 13 février 2019 - 11:42
dans
Lego
En fait c'est surtout lié à la variation du centre de gravité à cause de la masse des pattes. Vue que la variation est au carré plus la masse des pattes est importante plus l'effet au carré va limiter ton araignée... A cela s'ajoute l'énergie cinétique de chaque déplacement d'une patte s'éloignant du centre de gravité qui est insignifiant pour de petites araignées, mais devient générateur de merde à plus grande échelle. C'est d'ailleurs pour cela que les pattes des araignées sont si fines par rapport au corps et qu'il n'y a pas d'araignée géante ou d'autres animaux ayant développer cette stratégie dans la nature (merci Darwin).
Donc si tu voulais faire cela il faudrait les pattes les plus légères possibles et des mouvements de plus en plus lents :-) EN résumé pas de servo sur les pattes mais à distance avec des tiges pour distribuer la force.
Par contre le quadrupède est bp plus complexe concernant l'équilibre... Ou on alterne des positions stables et des déséquilibres




