Bonjour,
Nous sommes en Master en electronique et dans le cadre de notre projet scolaire nous réalisons un robot chat à échelle 1.
Je suis en charge de la programmation.
L'idée est de reproduire fidèlement les mouvements d'un vrai matou.
Pour l'instant je bosse sur une patte accrochée à une épaule.
Nous utilisons des moteurs brushless et je programme sur des Psoc (les micro de chez Cypress).
Je bosse sur une des pattes avant.
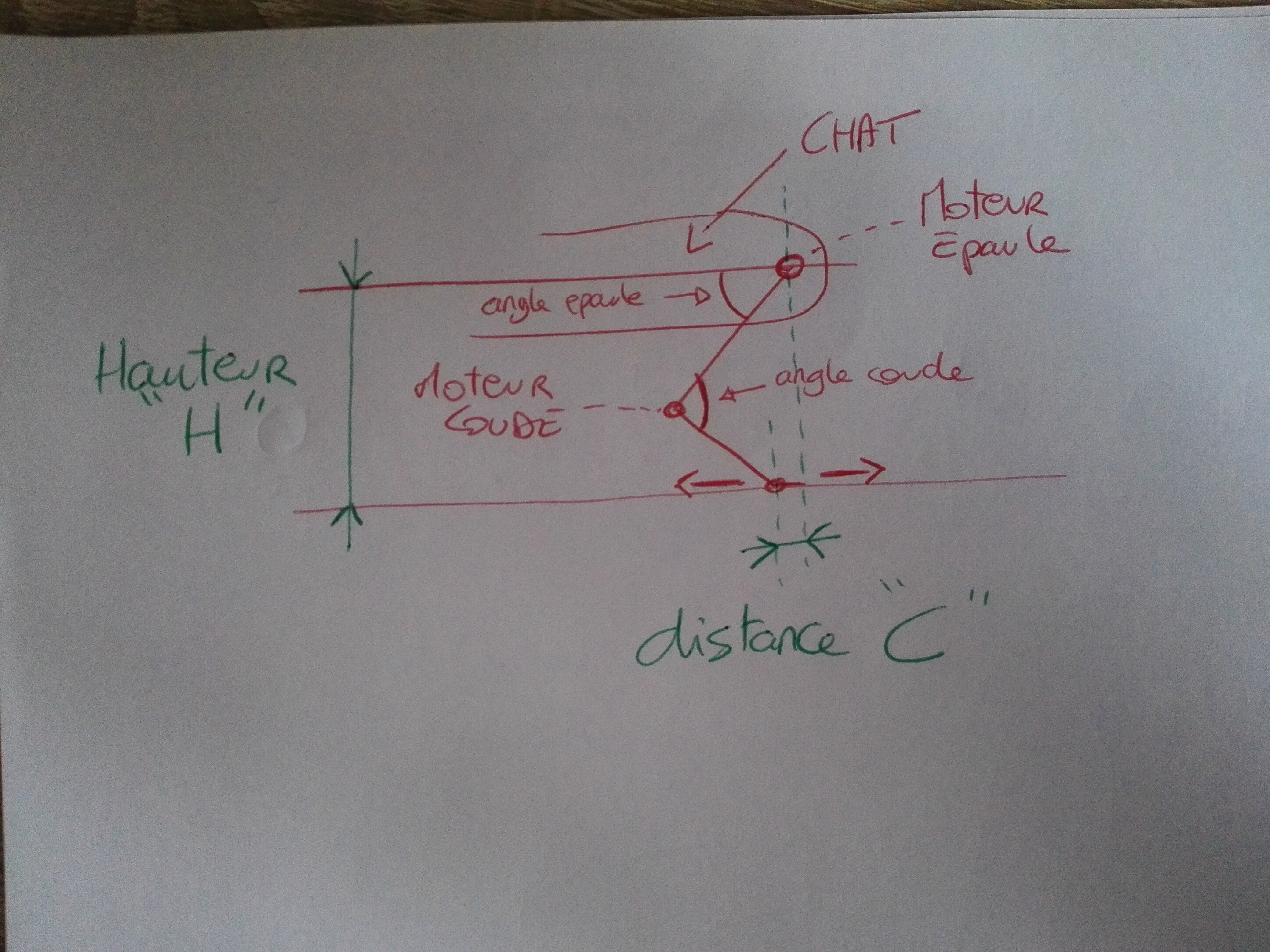
Pour l'instant je ne m'occupe que de deux moteurs : celui qui controle l'épaule et celui du coude.
J'ai fait des algo math pour déterminer les angles que je dois avoir sur mes deux axes.
J'ai eu le temps de bricoler un soft sur mon ordi pour piloter la carte en USB.
Le contrôle des moteurs marche très bien et je suis capable de commander mes deux moteurs en même temps pour leur demander d'aller à une position précise.
Je sèche pour faire des mouvements fluides...
Avez vous des idées de comment faire pour réaliser un mouvement fluide en faisant bouger les deux moteurs en même temps?
En fait, je cherche une sorte d'algo d'asservissement numérique qui commanderai directement mes moteurs de telle sorte qu'ils suivent une consigne que je bouge en temps réel.
J'avais pensé à un correcteur PID mais le soucis c'est que je commande mes moteurs en vitesse et non en position. Même en dérivant la sortie du correcteur je n'ai pas eu de résultats convainquant.
Je pense qu'il faut que je continue de bosser sur le PID.
Pour asservir la vitesse, j'ai un retour tacho de chaque moteur.
Si vous avez des idées, merci de me les faire parvenir! Ce serait super!
Titus