Bonjour,
Voila je suis sur un projet d'amélioration d'un kit bioloid Comprehensive Kit (Robot bipéde)
Le robot est équipé de série d'une batterie située dans le boîtier au dos du robot.
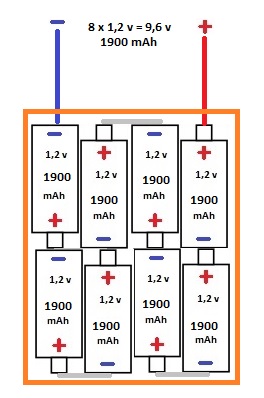
Cette batterie est composée de 8 éléments ni-mh 1900 mAh comme ceci
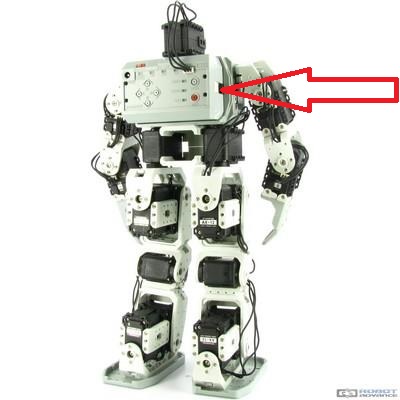
Au vue des modifications apportées sur le robot qui à pris 13 cm, il me faut absolument trouver une méthode pour baisser son centre de gravité.
J'ai donc dans l'idée de déplacer la batterie au niveau des jambes du robot.
Du coup, je profiterai bien de cette technique pour grossir la taille de la batterie et donner ainsi une plus grande autonomie
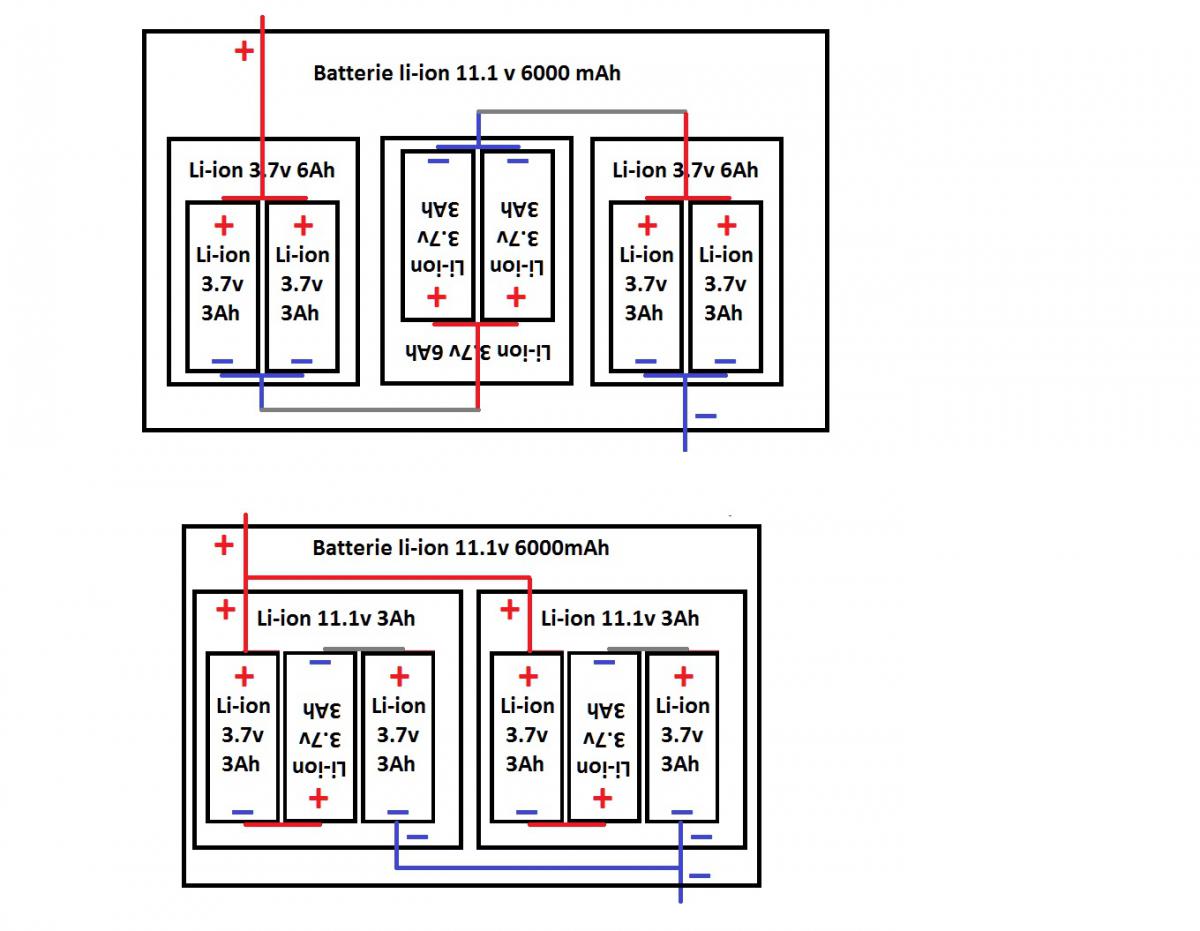
Voici comment j'aimerai répartir les piles pour avoir une batterie de 5600 mAh

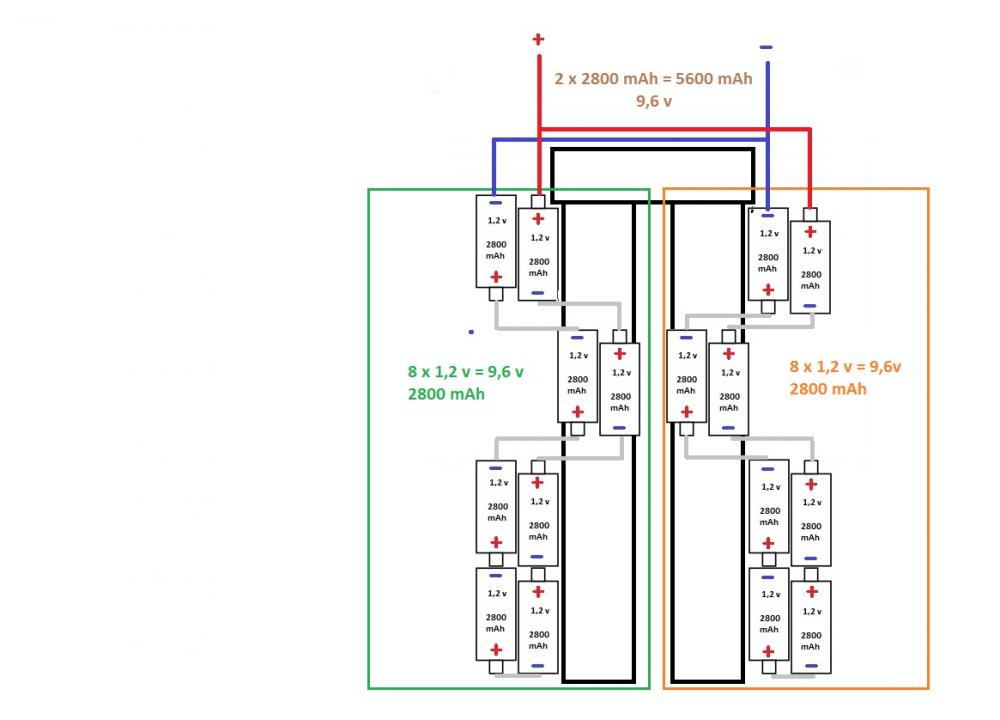
Il y a donc une batterie de créée de chaque coté de la jambe composé de 8 éléments branchés en série pour arriver aux 9,6 v recommandé par le fabricant. Puis on branche les deux batterie en parallèle pour avoir un total de 5600 mAh.
Je ne suis pas du tout spécialiste des batterie et aimerai donc avoir votre avis sur ces branchements. De plus je me pose la question si le chargeur sera capable de recharger tout cela.
Model DSA-60W-12 1
INPUT 100-240VAC 50/60Hz 1.5A
OUTPUT +12V --- 5A



 )
)