

Bonsoir,
J'attaque la construction d'un robot quadrupède (type araignée).
J'ai prévu 4 pattes, 3 servos SG90 par patte.
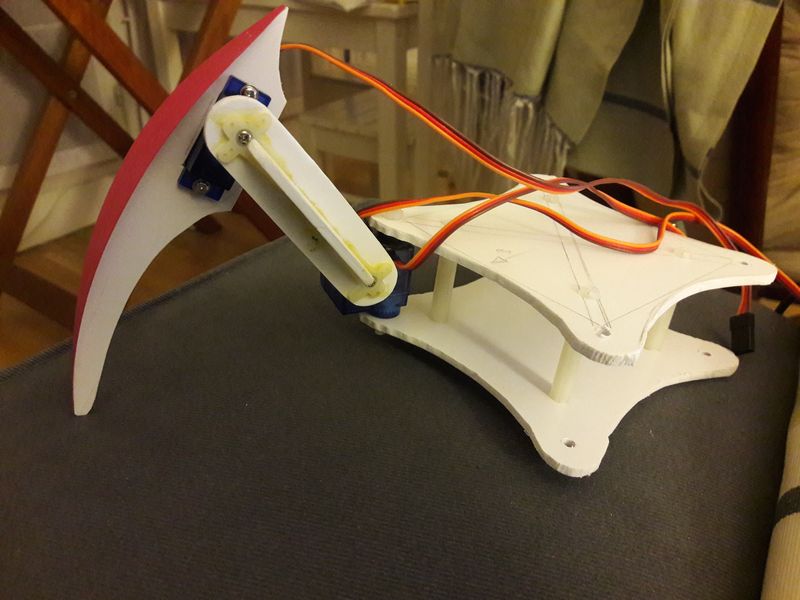
J'ai préparé le chassis et une patte.
Je me pose la question des dimensions.
=> faut il respecter certaines dimensions/proportions, ou il n'y a pas de contraintes ? <=
Pour info, j'ai 8cm entre chaque "hanche", 6cm pour le fémur et 10 cm pour le tibia.
Ci joint une petite photo pour illustrer.
Merci.
PS : et bien sur, je vous posterai la progression au cours de la construction...







 Par contre dans la video les servos qui supportent le poids du robot au niveau de l'épaule sont un peu déportés donc ils récupèrent du couple par rapport à ton montage en photo.
Par contre dans la video les servos qui supportent le poids du robot au niveau de l'épaule sont un peu déportés donc ils récupèrent du couple par rapport à ton montage en photo. 












