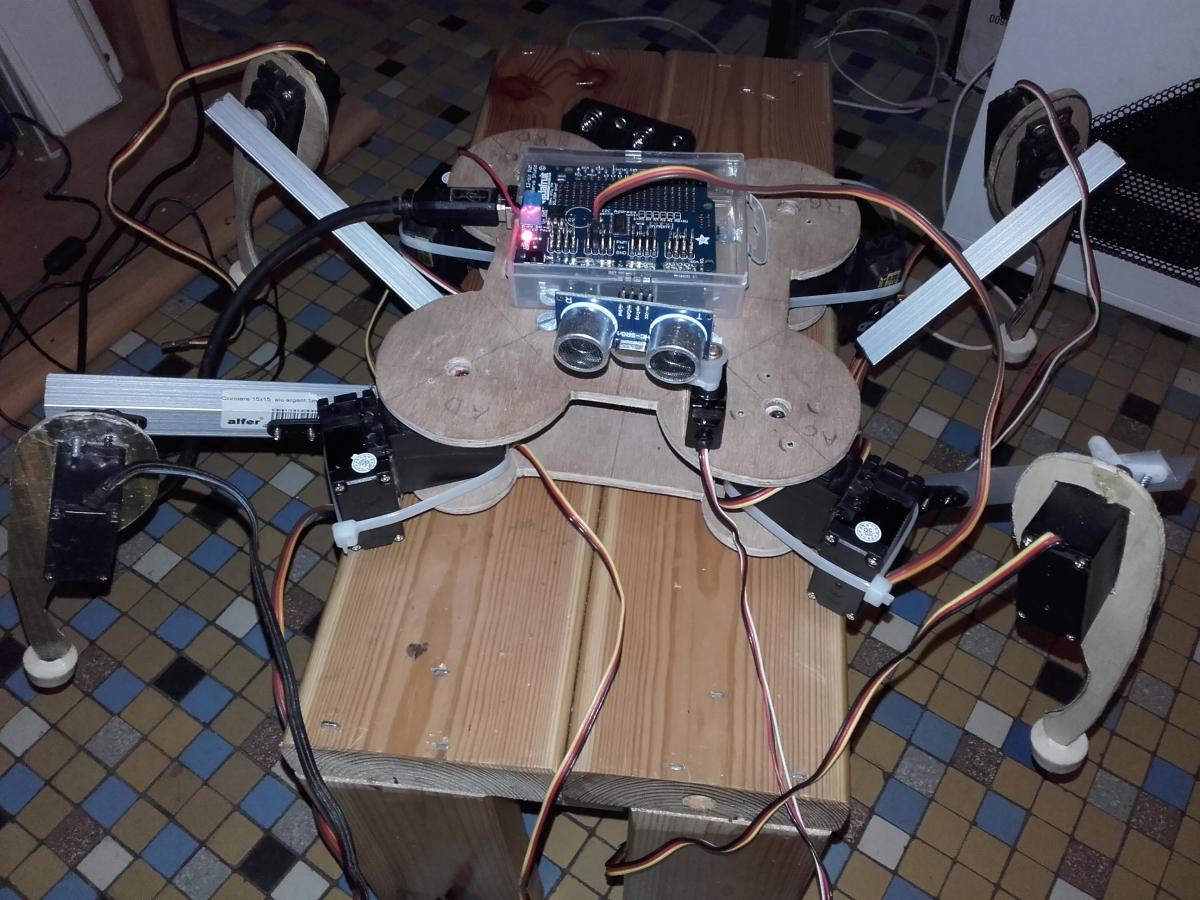
bonsoir j en suit au code c un code que j ai trouvé sur le net et que j ai modifier comme j'ai pu pour les 12 servo du quadrupéde, mes sa ne va pas.
voici le code.
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define SERVOMIN 150
#define SERVOMAX 600
#define CENTER 375
uint8_t servo1 = 1;
uint8_t servo2 = 2;
uint8_t servo3 = 3;
uint8_t servo4 = 4;
uint8_t servo5 = 5;
uint8_t servo6 = 6;
uint8_t servo7 = 7;
uint8_t servo8 = 8;
uint8_t servo9 = 9;
uint8_t servo10 = 10;
uint8_t servo11 = 11;
uint8_t servo12 = 12;
void setup() {
Serial.begin(9600);
Serial.println("Controle des Servo Moteur #1 et #9!");
pwm.begin();
pwm.setPWMFreq(60); // Analog servos run at ~60 Hz updates
Serial.println("Fin de setup()");
}
void loop() {
{
//--- patteAG (no 1) ---
Serial.println("Servo #1 à 45 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
int pulseLen = map( 70, 0, 150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo1, 0, pulseLen);
delay(100);
//--- patteAG (no 1) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo1, 0, pulseLen);
delay(1000);
//--- patteRG (no 2) ---
Serial.println("Servo #1 à 45 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0, 150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo2, 0, pulseLen);
delay(1000);
//--- patteRG (no 2) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo2, 0, pulseLen);
delay(1000);
//--- patteAD (no 3) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo3, 0, pulseLen);
delay(1000);
//--- patteAD (no 3) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo3, 0, pulseLen);
delay(1000);
//--- patteRD (no 4) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo4, 0, pulseLen);
delay(1000);
//--- femurAG (no 5) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 50, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo5, 0, pulseLen);
delay(1000);
//--- femurAG (no 5) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo5, 0, pulseLen);
delay(1000);
//--- hancheAG (no 6) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 20, 0,160, SERVOMIN, SERVOMAX );
pwm.setPWM(servo6, 0, pulseLen);
delay(1000);
//--- hancheAG (no 6) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 60, 0,140, SERVOMIN, SERVOMAX );
pwm.setPWM(servo6, 0, pulseLen);
delay(1000);
//--- femurAD (no 7) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 50, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo7, 0, pulseLen);
delay(1000);
//--- femurAD (no 7) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo7, 0, pulseLen);
delay(1000);
//--- hancheAD (no 8) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 20, 0,160, SERVOMIN, SERVOMAX );
pwm.setPWM(servo8, 0, pulseLen);
delay(1000);
//--- hancheAD (no 8) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 40, 0,140, SERVOMIN, SERVOMAX );
pwm.setPWM(servo8, 0, pulseLen);
delay(1000);
//--- femurRG (no 9) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo9, 0, pulseLen);
delay(1000);
//--- femurRG (no 9) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 50, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo9, 0, pulseLen);
delay(1000);
//--- hancheRG (no 10) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 20, 0,160, SERVOMIN, SERVOMAX );
pwm.setPWM(servo10, 0, pulseLen);
delay(1000);
//--- hancheRG (no 10) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 40, 0,140, SERVOMIN, SERVOMAX );
pwm.setPWM(servo10, 0, pulseLen);
delay(1000);
//--- femurRD (no 11) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 70, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo11, 0, pulseLen);
delay(1000);
//--- femurRD (no 11) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 50, 0,150, SERVOMIN, SERVOMAX );
pwm.setPWM(servo11, 0, pulseLen);
delay(1000);
//--- hancheRD (no 12) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 20, 0,160, SERVOMIN, SERVOMAX );
pwm.setPWM(servo12, 0, pulseLen);
delay(1000);
//--- hancheRD (no 12) ---
Serial.println("Servo #1 à 120 degrés");
// Transformation de degré (0 à 180) en pulse (SERVOMIN à SERVOMAX)
pulseLen = map( 40, 0,140, SERVOMIN, SERVOMAX );
pwm.setPWM(servo12, 0, pulseLen);
delay(1000);
}
}