
Je comprends bien ce que tu dis, mais je ne comprends pas le schémas de Briel.
A l'occasion, pourrais-tu faire un schéma de branchement pour ce driver.
Il n'y a pas d'urgence.

31 réponses à ce sujet
#21

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#22
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 juillet 2018 - 07:57
cas où tu utilise le même 5V pour l'arduino et le servo :
1 servo 9g par exemple : (image fournie par jekert page précédente )
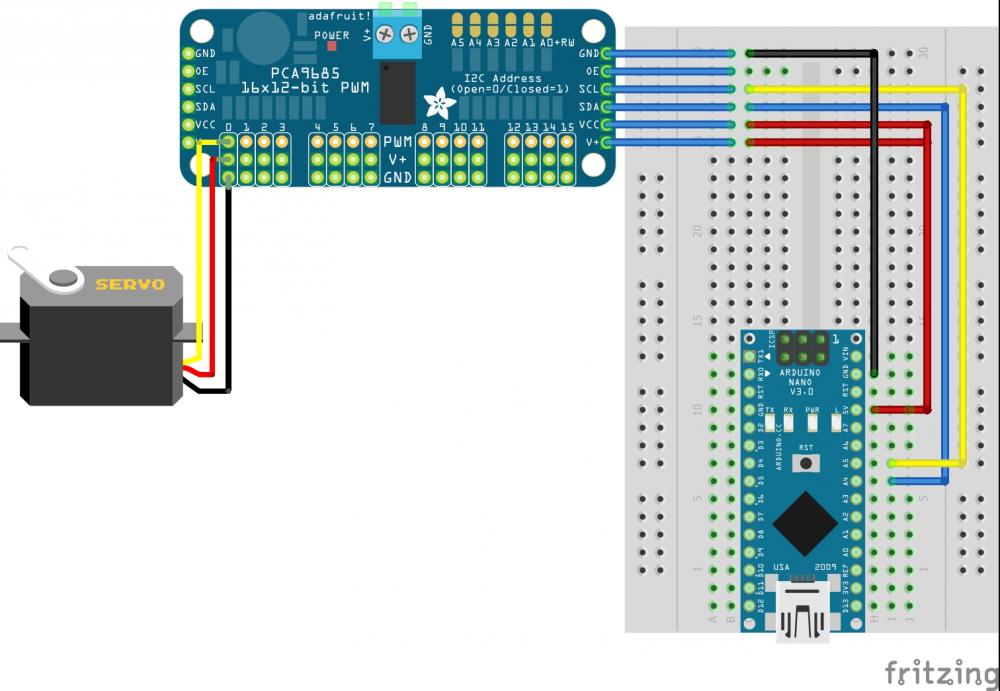
V+ => alimentation des servo
Vcc => Alimentation logique
Cas de Briel:
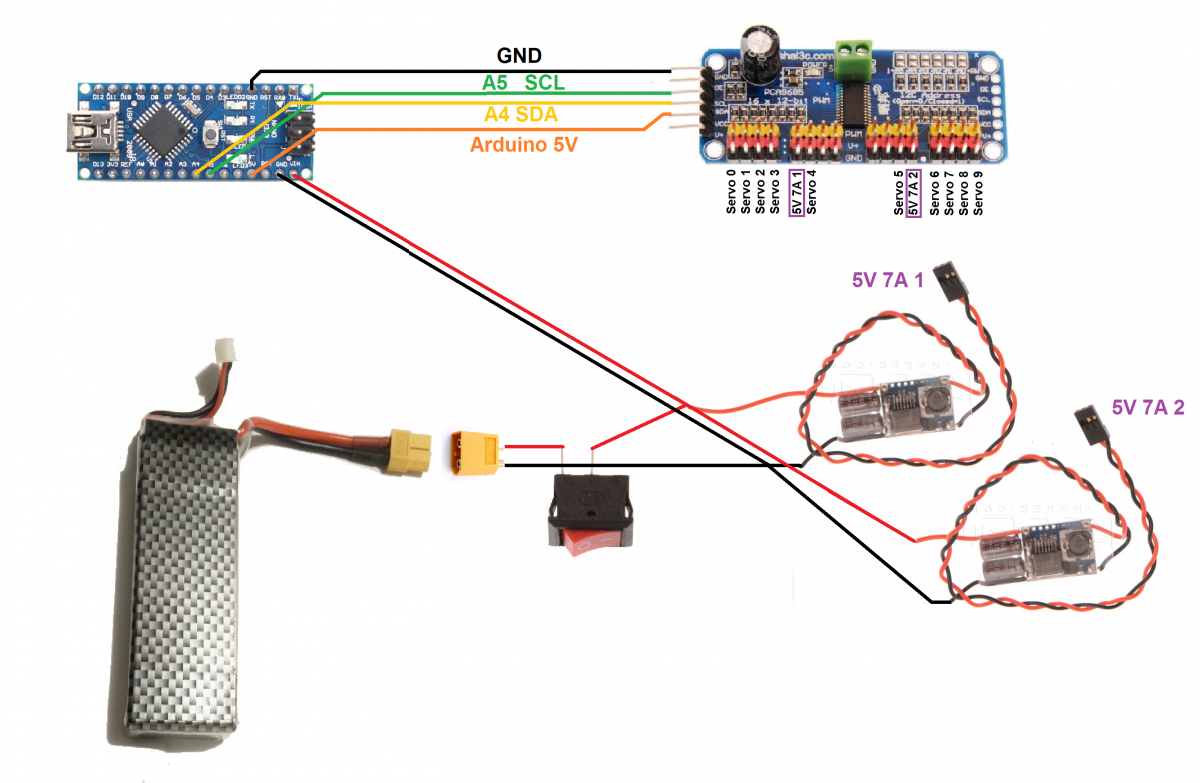
( image présente sur le blog de Briel )
VCC => 5V arduino
V+ => Relié aux convertisseur 5V 7A 1 et 2 en passant directement par les prise pour servo.
Je crois que je ne peux pas faire plus claire ...
Je ne comprends pas ce que tu ne comprends pas.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#23
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 juillet 2018 - 12:11
Oui, je connais bien ces schémas. Le premier ne m'aide pas puisque le servo est alimenté en 5V.
Le deuxième me pose plusieurs problèmes, mais essayons d'en parler un par un.
Premier problème, donc. Le convertisseur 5V 7A 2 prend son courant sur les broches GND et Vin du Nano. Pourquoi ?
Si tu veux bien, nous parlerons des autres problèmes, après.
Le deuxième me pose plusieurs problèmes, mais essayons d'en parler un par un.
Premier problème, donc. Le convertisseur 5V 7A 2 prend son courant sur les broches GND et Vin du Nano. Pourquoi ?
Si tu veux bien, nous parlerons des autres problèmes, après.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#24
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 juillet 2018 - 02:46
hum ;
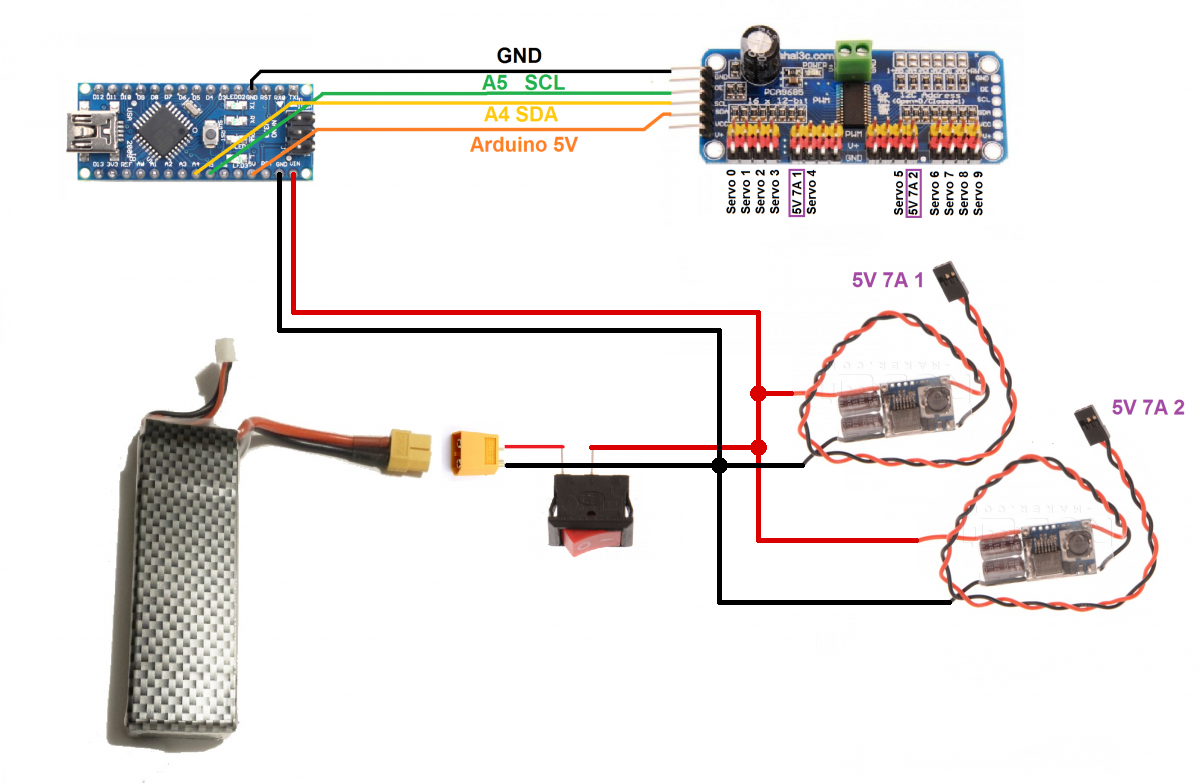
Les deux convertisseurs et la nano sont tous branchés sur le 12V de la batterie après être passé dans le bouton.
C'est une masse commune pour tous et un 12V commun pour tous.
Le 12V batterie va sur Vin arduino , il va sur le convertisseur 1 et il va sur le convertisseur 2...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#25
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 juillet 2018 - 03:36
Jamais, je n'aurais pensé que les lignes rouges et noirs étaient en contact. D'autant que l'on peut voir des tresses...
Mais bon, ok.
Donc, le driver est alimenté en 5V par le Nano. Très bien.
Deuxième problème : Pourquoi les 2 convertisseurs alimentent les servos au travers d'une prise servo. Pourquoi ne pas utiliser le bornier ?
Mais bon, ok.
Donc, le driver est alimenté en 5V par le Nano. Très bien.
Deuxième problème : Pourquoi les 2 convertisseurs alimentent les servos au travers d'une prise servo. Pourquoi ne pas utiliser le bornier ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#26
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 juillet 2018 - 01:28
Jamais, je n'aurais pensé que les lignes rouges et noirs étaient en contact.D'autant que l'on peut voir des tresses...
J'ai pas compris ce que tu écris là et du coups je pense qu'il y a encore une incompréhension entre nous ...
Sur le driver 5V 7A il y a des fils noir et rouge en entré et des fils noir et rouges, tressés ensemble monté sur un connecteur en sortie qui a le format d'une prise pour servomoteur.
Les fils noir et rouge d'entré sont branchés sur la batterie => V Batterie
Les fils noir et rouge de sortie sont branchés sur l'alimentation des servo => V servo 5V 14A ( 7A * 2 car deux convertisseurs )
Deuxième problème : Pourquoi les 2 convertisseurs alimentent les servos au travers d'une prise servo. Pourquoi ne pas utiliser le bornier ?
- 2 convertisseurs car 7A c'est pas suffisant, 14 = 2 *7 c'est ok
- à travers une prise servo car la sortie du convertisseur est déjà sur une prise servo de base
- ne pas utiliser le bornier car : j'ai déjà une prise servo sur mes convertisseurs et j'ai pas envie de couper la prise ( un bornier c'est bien quand tu as pas déjà un connecteur ) + meilleur répartition du courant dans la carte en passant par la ligne des servo.
Justification de la meilleur répartition : Si tu mets tes deux convertisseurs sur le bornier et que les servo de briel consomment 14A eh bien tu as les piste qui relient le bornier au reste qui se prennent 14A... Ce qui me paraît limite pour ces pistes. Alors qu'en mettant les deux convertisseurs séparés, sur des prise pour servo, si les servo consomment au total 14A, grosso modo pour imager tu as 3.5A qui partent de chaque côté à droite et à gauche de la prise pour servo sur laquelle tu t'es branché ... et donc tu te retrouve avec grosso modo que 3.5A en max sur des pistes au lieu de 14A ...
Tu comprends ce que je veux dire concernant ce dernier point ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#27
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 juillet 2018 - 06:35
A mon avis, sur ton schéma, on comprend bien que le convertisseur 5V 7A 1 est branché sur la batterie, mais il n'en va pas de même pour le convertisseur 5V 7A 2.J'ai pas compris ce que tu écris là et du coups je pense qu'il y a encore une incompréhension entre nous ...
Sur le driver 5V 7A il y a des fils noir et rouge en entré et des fils noir et rouges, tressés ensemble monté sur un connecteur en sortie qui a le format d'une prise pour servomoteur.
J'ai bien compris pourquoi tu branches les convertisseurs directement sur les prises servos. C'est une bonne astuce, mais qui malheureusement supprime 2 servos.
Peux tu me confirmer que l'alimentation des circuits logiques du driver se fait au travers de Vcc en 5V, alors que l'alimentation des servos se fait au travers de V+, que ce soit sur le bornier ou les pins, et cela quelle que soit la tension, 5V, 7,4V, 12V, 24V etc.
Dans mon cas, un convertisseur 5V me sera utile pour alimenter un Arduino et le driver, mais je devrais donc brancher la batterie 7,4V directement sur le bornier ou sur 2 prises servos en suivant ton astuce.
Ma chaine YouTube : https://www.youtube..../oracid1/videos



#30
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 juillet 2018 - 01:33
Merci à tous pour votre aide.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#31
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 juillet 2018 - 03:21
Ok je comprends désormais où était l'incompréhension...
Je pensais que le texte d'explication qui accompagnait le schémas était suffisant :
"
Schémas de câblage de l'ensemble :
- La batterie est reliée à un interrupteur générale qui permet de couper le robot sans avoir à débrancher la batterie en passant par un connecteur XT60 pour faciliter le changement de batterie si besoin.
- La sortie 12V + GND en sortie de l'interrupteur va alimenter les deux convertisseurs 5V 7A et le Vin + GND de la arduino nano directement. le Vin de la arduino nano supporte sans problème du 12V et il vaut mieux ne pas parasiter le 5V de la nano avec le 5V des servo qui peut être un peu bruité... encore un peu de soudures seront nécessaire.
- Les servomoteurs et les convertisseurs seront branchés directement sur le driver pour servo. Les connecteurs déjà présent sur les servomoteurs et les convertisseurs permettent de se brancher directement sans faire aucune modifications.
- Le driver de servomoteur sera relié à l'arduino par 4 fils femelle femelle à condition d'avoir soudé les pins sur la nano. Sinon il est possible de directement souder les fils sur la nano ... Les 4 fils à brancher sont GND 5V SDA (= A4) et SCL ( = A5) .
"
Du coup j'ai modifié le post sur l'électronique de Briel pour mettre le schémas amélioré par Forthman.
Si vous pensez que le texte doit être modifié pour être plus clair hésitez pas à le dire ...
Merci à tous =)
- Oracid aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#32
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 juillet 2018 - 06:28
Merci Mike.
Je poursuivrai éventuellement cet échange sur un de mes projets si j'ai des questions plus spécifiques.
Je poursuivrai éventuellement cet échange sur un de mes projets si j'ai des questions plus spécifiques.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

