J'ouvre mon tout premier fil de test suite à la réception des produits qui m'ont été envoyé pour leur validation dans la boutique robot-maker. Au déballage rien à redire si ce n'est que le colis est très bien protégé! (sympa les espèces de filets comme protection !)
Ce test va concerner leNema 17 que j'ai reçu. Il est en cours de rédaction et sera bientôt publié !
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 juin 2016 - 07:04
Merci de ta remarque léon.
Certaines caractéristiques techniques ont donc été ajoutées. Si tu en veux d'avantage n'hésite pas à demander.
Pour rappel c'est une boutique par les makers pour les makers => Les makers sont considérés comme "acteurs" de la boutique ( si ils le souhaitent ) .
Du coup plutôt que dire " où sont les caractéristique " / " C'est dommage " , ne pas hésiter à dire => " Peux t'on avoir tel info supplémentaire "
Ainsi le testeur ou moi même pouvons ajouter les informations demandées sur le fil et dans la fiche produit !
Pour rappel c'est une boutique par les makers pour les makers => Les makers sont considérés comme "acteurs" de la boutique ( si ils le souhaitent ) .
A ce même titre pour rappel si il y a des moteurs en particuliers que vous souhaitez que l'on propose il ne faut pas hésiter à les demander (dans la rubrique dédiée des annonces officielles), le but de cette boutique étant de fournir plus rapidement mais également avec plus de garanties, des produits que vous pouvez avoir parfois quelques réticences à commander à l'étranger (pour les garanties, les délais d'acheminement...) et qui n'est pas forcément disponible chez votre "distributeur de proximité". Ici tout est pré-sélectionné, validé, testé...
Avant de commencer à parler du Nema 17, un bref résumé sur les moteurs pas à pas pour ceux qui le souhaitent :
Comme l'a dit Leon, le nombre 17 caractérise le format du moteur. Seule la longueur du moteur change en fonction des puissances.
Le Nema 17 reçu : Nema 17HD5046-01N.
Pour interpréter la référence, vous pouvez utiliser ce pdf :ref 17hdX.pdf29,82 Ko2122 téléchargement(s) mais je n'ai pas encore réussi à tout décoder.
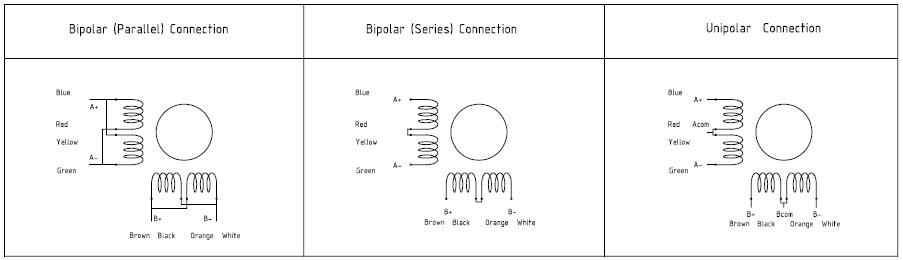
On a donc à faire à un moteur pas à pas hybride à 4 fils, donc bipolaire.
Les caractéristiques:
- Il possède un couple maximal de 4,2 kg/cm. - Le courant par phase est de 1,7A à 2,55V à larrêt. - Il faut faire 200 pas pour faire une rotation, soit un pas angulaire de 1,8°.
On peut vérifier la résistance des bobines :
- En théorie, R=U/I, R=2,55V/1,7A donc R=1,5 ohms. - En pratique, on mesure à l'ohm-mètre : 0,8 ohms! Puisque la même résistance est mesurée sur les 2 bobines, le moteur est « équilibré », mais la valeur de résistance est différente du calcule. Bizarre ? Non, on verra pourquoi après !
Coté dimension : Au format Nema 17, donc 43.2mm*43.2mm et 47mm en longueur.
Son poids : 365g.
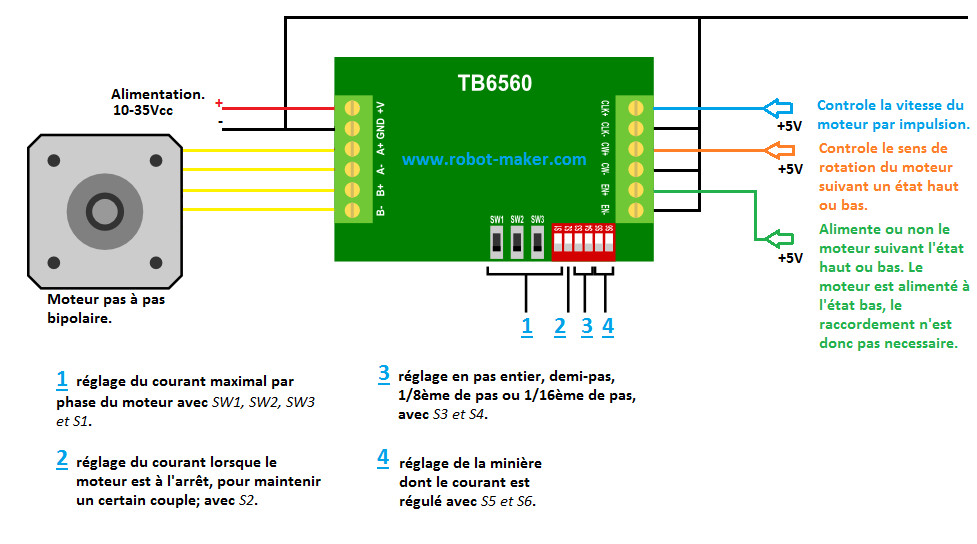
Passons un peu à la pratique ! Je vais faire un montage simple, constitué d'un générateur de fréquence pour la vitesse du moteur, et un driver pour le contrôle du moteur ( TB6560, aussi testé pour la boutique robot-maker).
Une image du câblage :
Sans m'attarder sur ce driver qui fera l'objet d'un autre test, avec ce montage je peux :
- Contrôler la vitesse de rotation, en utilisant des pas entiers ou des pas fractionnés. - Contrôler le sens de rotation du moteur. - Ajuster la puissance maximale, si je veux qu'il consomme moins par exemple.
On va observer le comportement du moteur ! Dans la vidéo, je fais fais varier la fréquence pour faire tourner le moteur plus ou moins vite. Les seuls paramètres changés sont l'intensité par phase et le nombre de pas / micro-pas. A la fin de la vidéo, je fais 2 tests de couple ( il y a 12.2cm entre l'axe du moteur et le point d'appui).
On entend qu'en utilisant le pas entier, le le moteur vibre beaucoup plus qu'avec les micros pas; idem avec le courant max par phase, plus il est bas et moins le moteur vibre. Au niveau de la résonance du moteur, on l'observe juste au niveau du courant sur l'oscillo, rien de visible sur l'axe du moteur, un bon point donc.
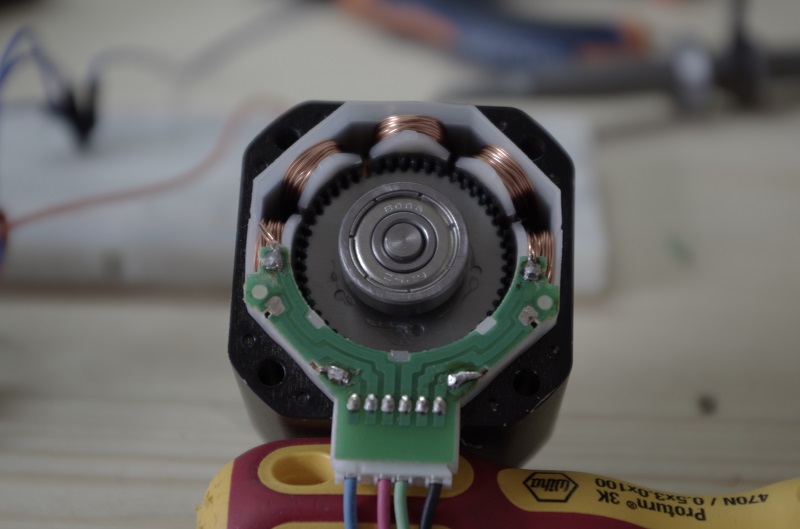
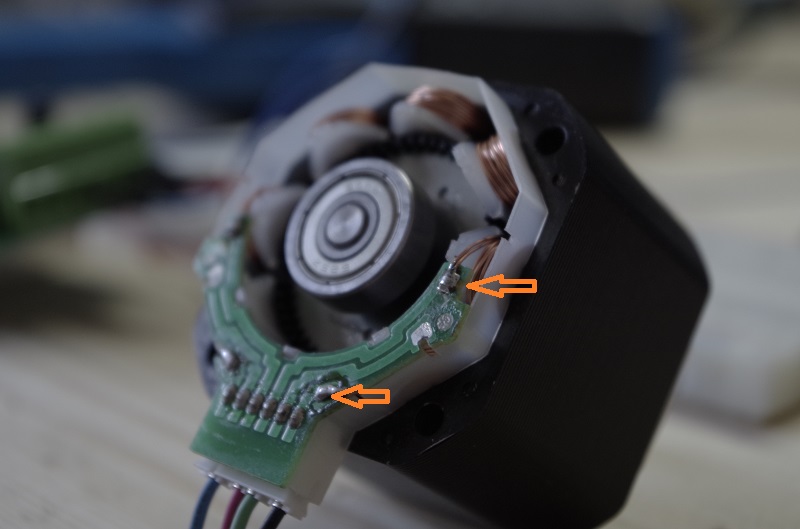
Pour le couple, à 1.6A par phase je ne mesure "que" 1.85 kg/cm. Du coup j'ai démonté larrière du moteur pour vérifier le câblage des bobines!
Après avoir vérifier en les dessoudant, les bobines sont en parallèle! Ce qui explique les 0.8 Ohms au lieu des 1.5 Ohms du calcul. Ça veut aussi dire que ce moteur peut accepter le double en intensité, soit 3.4A par phase, pour atteindre son couple maximal !
Je ferai bientôt des tests de températures pour compléter le test, mais à la main on voit déjà qu'il ne chauffe pas! (Normal à 1.6A, c'est de la rigolade pour lui ^^)
N'hésitez pas à me demander d'autre test ou corriger certains points
- Comment déterminer si un moteur pas à pas est plus adapté qu'un servo, pour un projet ? - Quel est le rapport poids, puissance réelle, consommation, entre un moteur pas à pas et un servo, carte électronique comprise ? - la mise en œuvre d'un moteur pas à pas, est elle plus, ou moins complexe que celle d'un servo ?
* dans quel cas un moteur pas à pas est plus adapté qu'un motoréducteur à courant continu ou un servo?
si tu as besoin d'une grande précision de positionnement, d'une grande résolution, d'une très bonne répétabilité. C'est pour cela que ces moteurs sont très utilisés dans les machines à commande numérique. Si tu n'as pas besoin de cette très bonne précision de positionnement, alors un moteur pas à pas ne servira strictement à rien!
* performances poids/puissance/rendement
Clairement, les moteurs pas à pas ont un rendement plus mauvais que les moteurs à courant continu ou les brushless. Donc un moteur pas à pas consommera plus, et chauffera plus, pour la même application.
En plus, à puissance identique, ils sont plus lourds, plus encombrants.
Pour un outil à commande numérique amateur (imprimante 3D, fraiseuse/tour à commande numérique), ces contraintes ne sont absolument pas gênantes.
Mais dans une application embarquée sur un robot mobile, il faut faire attention.
J'avais fait un petit robot mobile à moteurs pas à pas qui fonctionnait très bien cependant, car il était léger, avec des moteurs légers, et une autonomie assez faible.
Attention, dès qu'on vise des puissances un peu élevées (à partir de quelques dizaines de watt), la taille, la consommation, et le prix d'un moteur pas à pas s'envolent. Et dans ce cas, un moto-réducteur asservi, à courant continu, devient rapidement plus économique.
* facilité de mise en oeuvre
Déjà, avec des drivers moteur pas à pas modernes, c'est beaucoup plus simple qu'avant : il suffit d'injecter 2 signaux : step et direction, et c'est tout.
Pour la complexité, ça dépend de quelle application tu vises. Je dirais que c'est plus complexe qu'un servomoteur.
Mais en général, les moteurs pas à pas ne remplacent pas un simple servomoteur de modélisme (un servomoteur est infiniment moins précis), mais plutôt un moteur à courant continu ou brushless asservi (avec un asservissement PID, retour d'état par codeur). Et dans ce cas, le moteur pas à pas est infiniment plus simple à mettre en oeuvre qu'un moteur asservi, car il n'y a pas l'asservissement à gérer (dans le microcontrôleur), et il n'y a quasiment rien à régler : juste le courant du régulateur, et c'est tout.
C'est bien pour ça qu'ils sont massivement utilisés en amateur, là où les applications industrielles utilisent des moteurs asservis plus performants.
Pour finir, les 2 familles "moteur pas à pas" et "moteur courant continu/brushless asservi par codeur" n'ont pas de connaissance de leur "position absolue", contrairement à un servomoteur de modélisme. Donc il faut y rajouter soit un potentiomètre (si pas besoin d'une très grande précision absolue), soit des contacteurs de butée (pour une très grande précision absolue). Donc c'est une complexité supplémentaire!
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 juillet 2016 - 11:39
Je complète juste une phrase de léon pour le bonus :
Pour finir, les 2 familles "moteur pas à pas" et "moteur courant continu/brushless asservi par codeur" n'ont pas de connaissance de leur "position absolue", contrairement à un servomoteur de modélisme. Donc il faut y rajouter soit un potentiomètre (si pas besoin d'une très grande précision absolue), soit des contacteurs de butée (pour une très grande précision absolue).
Soit utiliser un codeur avec 3 voies => 2 voies " classique" de codeur en quadrature et une voie plus rare souvent noté "index" qui permet de donner l'information du " zéro " pour du recalage sur un tour en cas de saut de pas.
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 juillet 2016 - 09:37
Du coup au vu de tes tests, quel est la vitesse max en tour/min que tu as réussis à obtenir à vide ? Et avec quel mode d'excitation et quel réglage de courant?
D'après les tests c'est compliqué pour la vitesse max. Elle est différente si on utilise une pente d'accélération ou non, mais je peux donner des exemples:
-avec pas entier et 3A => 420 tr/min avec ou sans pente.
-demi pas et 3A => 540 tr/min avec pente et 375 tr/min sans pente.
-pas entier et 1A => 720 tr/min avec pente et 300 tr/min sans pente.
-demi pas et 1A => 580+ tr/min avec pente et 255 tr/min sans pente.
-pas entier et 0.3A => 810 tr/min avec pente et 195 tr/min sans pente.
-demi pas et 0.3A => 580+ tr/min avec pente et 165 tr/min sans pente.
"+" veut dire que mon montage avec le ne555 n'est pas assez rapide pour atteindre la limite de vitesse du moteur.
"Avec pente": j'augmente la vitesse progressivement jusqu'à ce que le moteur décroche.
"Sans pente": je bloque l'axe du moteur et le lâche d'un coup, je cherche progressivement la fréquence max à laquelle il se relance seule. Ça équivaut à un démarrage brusque.
Je viens de voir ta vidéo sur la mesure du couple du moteur, et je pense que ton résultat est erroné pour 2 raisons :
1) Ton bras de levier n'appuie pas perpendiculairement sur la balance, la longueur par laquelle tu multiplies ta valeur mesurée est donc fausse, il serait plus judicieux de placer une cale afin d'appuyer en ayant le bras de levier à l'horizontal.
2) Une balance (bas de gamme ou pas) doit toujours être placée sur une surface de niveau et mesurer un poids (perpendiculaire à la surface d’appui donc, en tout cas sur Terre). Si cela n’est pas respecté (voir le point ci-dessus), la valeur donnée par la balance peut être totalement fausse.
Je te propose donc une autre solution pour mesurer un couple :
Attacher un sac lesté au bout de ce bras et le maintenir à l’horizontal avec le moteur.
Tu augmentes le poids du sac jusqu’à ce que le moteur décroche.
Une fois cette étape franchie, tu n’as plus qu’à peser le sac (perso j’utilise des écrous pour lester).
ATTENTION : Le couple ainsi mesuré est le couple de maintien du moteur. Le couple d’un moteur pas à pas diminue fortement en fonction de la vitesse, il serait donc intéressant de fournir une courbe d’évolution de cette caractéristique. (Pour l’obtenir, même technique mais avec des fréquences, si le moteur arrive à passer le point horizontal du bras, c’est qu’il faut augmenter le leste)
Je viens de mesurer, je suis à 6mm du dessus de la balance sur un bras à 122mm, donc il est bon à 2 3° près. La valeur doit varier de quelques grammes.
Pourquoi pas avoir une courbe couple/vitesse, ce serait utile.
Entre la mesure et ce qui est annoncé, il ya souvent une différence, mais ce qui est important pour moi, c'est d'avoir des Nema17 suffisamment puissants pour mon imprimante.