
Du coup, a quoi sert le différentiel ? À donner plus de couple avec les 2 moteurs ?

Roberto [PPE]
Débuté par Jekert, janv. 08 2017 03:35
26 réponses à ce sujet
#22

Jekert
-
- Modérateur
-

- 227 messages
Auteur
- Gender:Male
Posté 24 janvier 2017 - 09:28
Oui plus de couple pour pouvoir monter les pentes définies à la vitesse désirée
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute
#23
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 25 janvier 2017 - 07:47
Le plus important, c'est de bien suivre l'avis de tes profs.
Merci pour ton petit schéma qui apporte la réponse à nos interrogations.
Comme tu le dis, ici, les différentiels ont pour fonction de coupler les moteurs 2 à 2. C'est une excellente et classique solution de couplage de moteurs !
Si un moteur est plus rapide que l'autre, le différentiel fera son office et évitera de faire exploser le réducteur de vitesse de l'autre moteur.
Les 2 chenilles de ce char, ne sont donc pas couplées par un différentiel. Mais ce n'est pas un problème. Si une chenille tourne plus vite que l'autre, le char va légèrement tourné et cela n'engendrera pas de frottements supplémentaires. Il faut considérer le char comme un véhicule à 2 roues et non pas 4 roues comme une automobile, où là, il y aurait des frottements supplémentaires dans les virages (et uniquement dans les virages) s'il n'y avait pas de différentiel.
Néanmoins, quelques soit la puissance de ce char, il ne montera pas une pente lisse (pas de la moquette, comme dans certaines vidéos), sauf s'il a beaucoup d'élan.
La seule solution pour résoudre cela, c'est de mettre des patins en caoutchouc aux chenilles, ou de simples élastiques.
Merci pour ton petit schéma qui apporte la réponse à nos interrogations.
Comme tu le dis, ici, les différentiels ont pour fonction de coupler les moteurs 2 à 2. C'est une excellente et classique solution de couplage de moteurs !
Si un moteur est plus rapide que l'autre, le différentiel fera son office et évitera de faire exploser le réducteur de vitesse de l'autre moteur.
Les 2 chenilles de ce char, ne sont donc pas couplées par un différentiel. Mais ce n'est pas un problème. Si une chenille tourne plus vite que l'autre, le char va légèrement tourné et cela n'engendrera pas de frottements supplémentaires. Il faut considérer le char comme un véhicule à 2 roues et non pas 4 roues comme une automobile, où là, il y aurait des frottements supplémentaires dans les virages (et uniquement dans les virages) s'il n'y avait pas de différentiel.
Néanmoins, quelques soit la puissance de ce char, il ne montera pas une pente lisse (pas de la moquette, comme dans certaines vidéos), sauf s'il a beaucoup d'élan.
La seule solution pour résoudre cela, c'est de mettre des patins en caoutchouc aux chenilles, ou de simples élastiques.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#24
Jekert
-
- Modérateur
-
- 227 messages
Auteur
- Gender:Male
Posté 23 juin 2017 - 09:13
Le bac est terminé !
J'en profite pour faire un petit récap de ce projet 
Entre temps le robot a été renommé Wally.
Voici le résultat final :
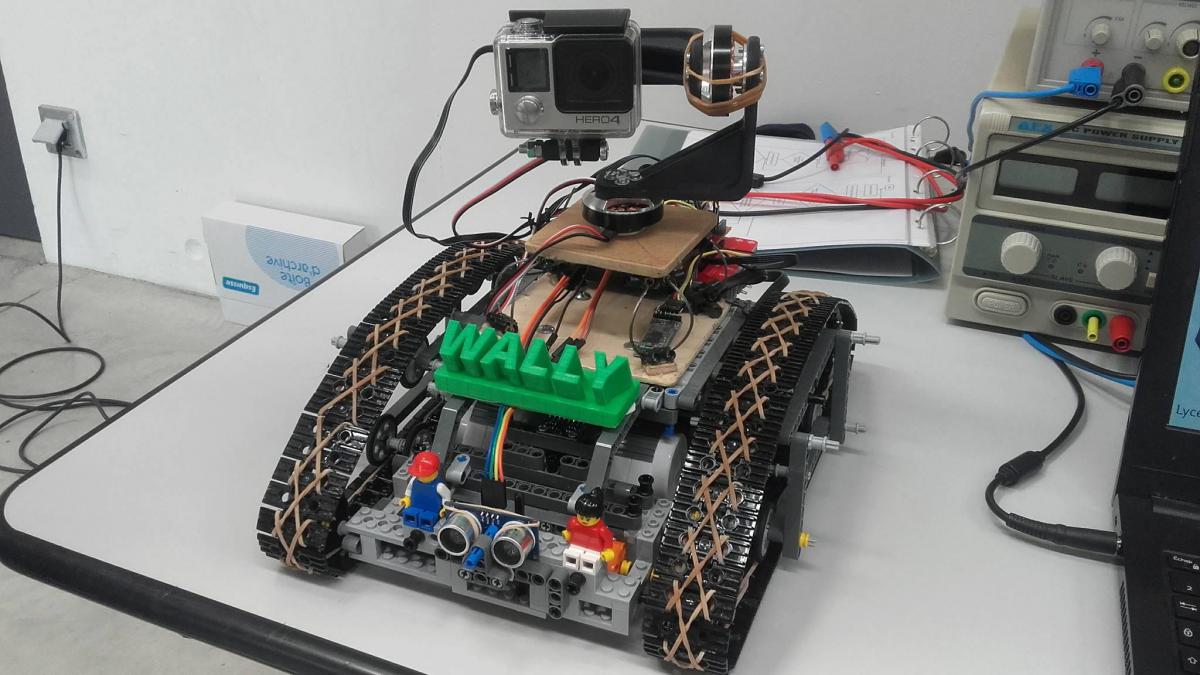
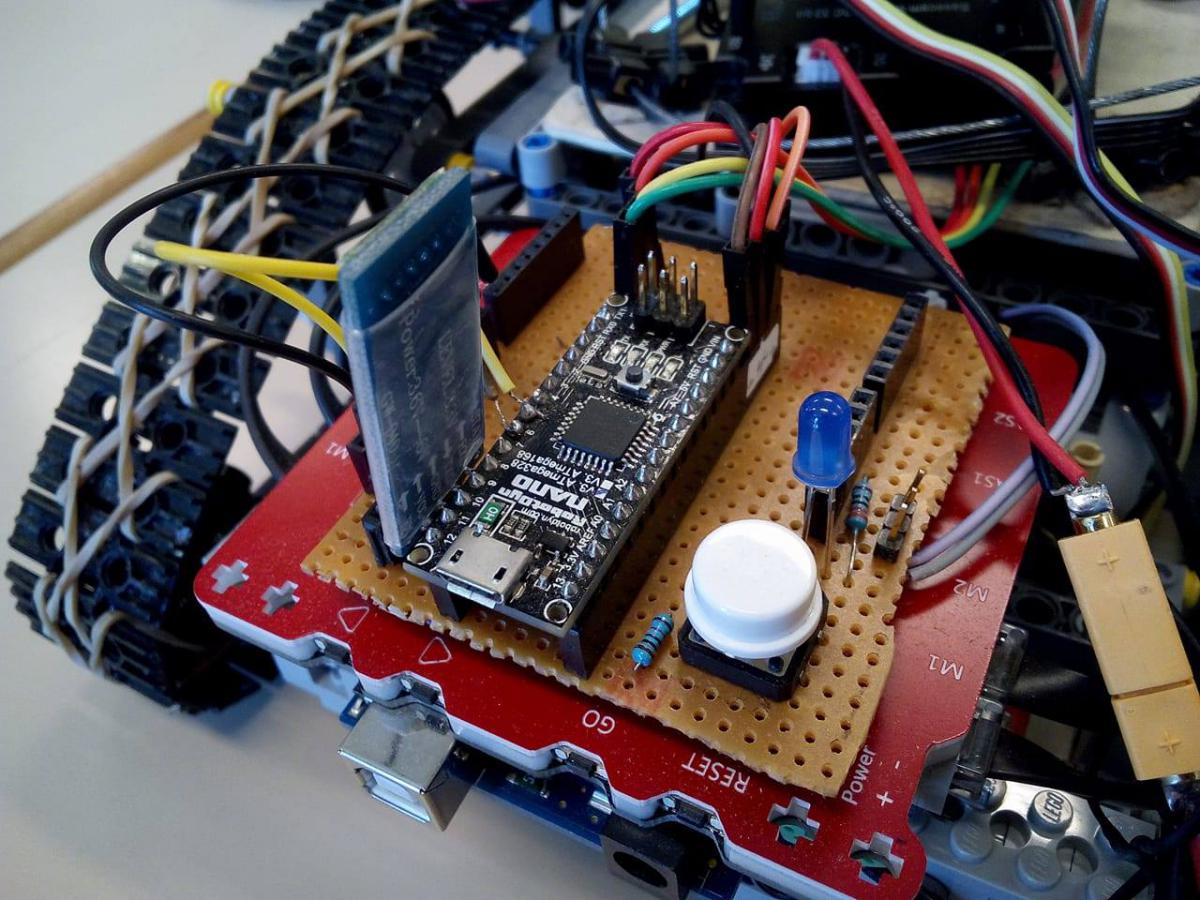
Le robot est constitué d'un chassis en LEGO propulsé par 4 servo LEGO et pilotés par une Arduino avec un shield EVShield, les capteurs de distance (HCSR04) et d'inclinaison (MPU6050) sont connectés à une autre Arduino. Les deux communiquent avec 2 entrées/sorties digitales.
Sur le châssis on a mis un amortisseur de vibration fait à partir de freins de vélo et de 2 planches en bois.
Le stabilisateur est composé de 3 moteurs brushless montés sur des pièces imprimées en 3D. Ces moteurs sont commandés par une carte SimpleBcg 32bit qui communique avec l'application pour téléphone.
Une petite vidéo des différents tests :
L'orientation n'était pas encore totalement au point et malheureusement nous n'avons pas de vidéo embarquée, les fils d'un des moteurs se sont arrachés des bobines lors d'un déplacement (d'où les élastiques sur la photo). Mais le résultat est quand même satisfaisant
Quelques photos:
La gimbal:

Les cartes Arduino:
L'algorigramme du système de déplacement:
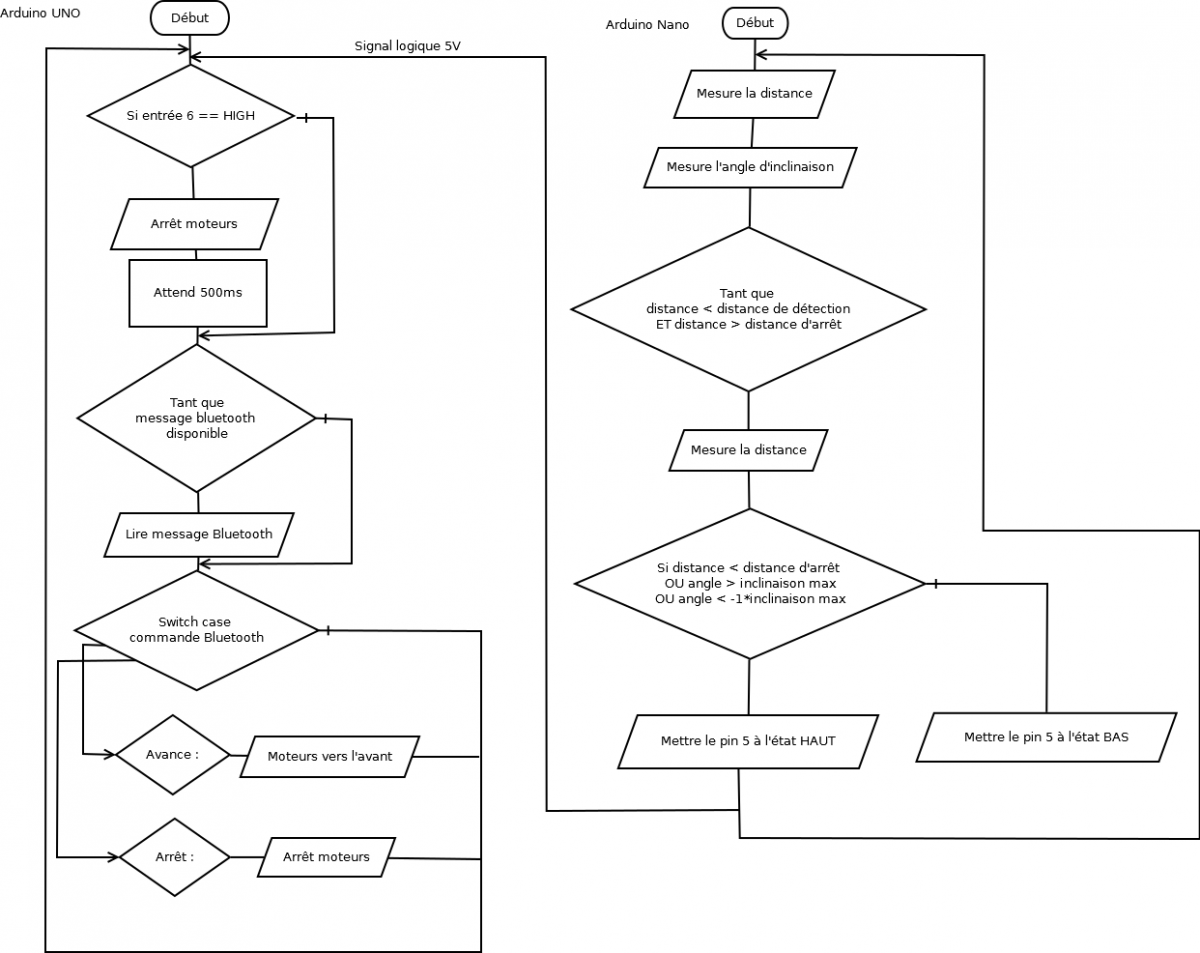
J'ai publié le programme sur le dépôt GitHub, normalement c'est la dernière version qui fonctionnait.
Quelques sites et logiciels utilisés :
- Google Drive : Partage et collaboration
- Freedcamp : organisation des tâches
- GitHub : Partage du code
- Dia : Algorigrammes
Encore merci à Oracid pour les chenilles n'hésite pas à me le dire si tu en a besoin, je n'ai pas prévu d'en réutiliser à court terme.
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute
#25
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 23 juin 2017 - 09:46
Pour les chenilles, si tu n'en a plus besoins, tu n'auras qu'à me les renvoyer, mais il n'y a pas urgence.
Quelques remarques :
- les élastiques fixés sur 3 maillons, cela ne me semble pas très indiqué. Cela contraint trop la liberté des maillons entre eux.
- dommage que le char ne soit pas un peu plus long et un peu plus large au regard de sa hauteur. Il aurait mieux gravi la pente, je pense.
- pour les roues, elles doivent être doublées, une avec pneu et l'autre sans pneu de manière à bien conduire la chenille.
Bon, ça fait le boulot.
Bravo !
Quelques remarques :
- les élastiques fixés sur 3 maillons, cela ne me semble pas très indiqué. Cela contraint trop la liberté des maillons entre eux.
- dommage que le char ne soit pas un peu plus long et un peu plus large au regard de sa hauteur. Il aurait mieux gravi la pente, je pense.
- pour les roues, elles doivent être doublées, une avec pneu et l'autre sans pneu de manière à bien conduire la chenille.
Bon, ça fait le boulot.
Bravo !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#26
Ulysse
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 23 juin 2017 - 01:00
Ha oui c'est bien ça.
Je ne connaissais pas du tout la carte SimpleBcg. Si j'ai bien compris elle est destinée à stabiliser la prise de vue de la caméra, configurable par logiciel, pilotable en bluetooth .
Je vois dans le synoptique une lecture de message bluetooth pour le déplacement. Du coup est-ce la même application qui pilote la caméra et le déplacement ? Ou sinon comment ça se passe ( 2 applis et 2 ports BT ? ) Est-ce qu'il y a un dialogue entre Arduino et SimpleBcg ?
Merci de m'éclairer
#27
Jekert
-
- Modérateur
-
- 227 messages
Auteur
- Gender:Male
Posté 23 juin 2017 - 03:53
Merci !
Ok oracid pour la pente, le robot n'est pas fait pour monter de fortes pentes (20° max d'après notre cahier des charges) c'est pour ça qu'il y a un capteur d'inclinaison pour couper les moteur si il détecte une pente supérieur à l'angle donné. Pour les roues, ça fonctionnait plutôt bien comme ça
Ulysse: Oui la carte se configure sur un logiciel (où tu dois rentrer les différents paramètres: le PID de chaque moteurs, les paramètres de communication,...) ensuite tu peut brancher tes moteurs directement sur la carte ainsi que le capteur (accéléro/gyro+boussole si je me souviens bien) et ton module de communication (ça peut-être un joystick, un module bluetooth, un récepteur radio (je suis pas certain de celui-ci)) et ensuite tu peux stabiliser et orienter un objet en fonction de tes paramètres
Il y a 2 applications différentes celle de SimpleBCG pour la stabilisation et l'application Arduino BlueControl pour le système de déplacement (donc il faut 2 téléphones pour commander le robot). C'est pas l'idéal, on avais prévu de rassembler le tout dans une même application mais c'était un bonus que nous avons pas eu le temps de réaliser... Il n'y a pas de communication entre l'Arduino et SimpleBCG mais il y en aurait eu une si on avait rassembler l'ensemble des commandes dans une application.
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




