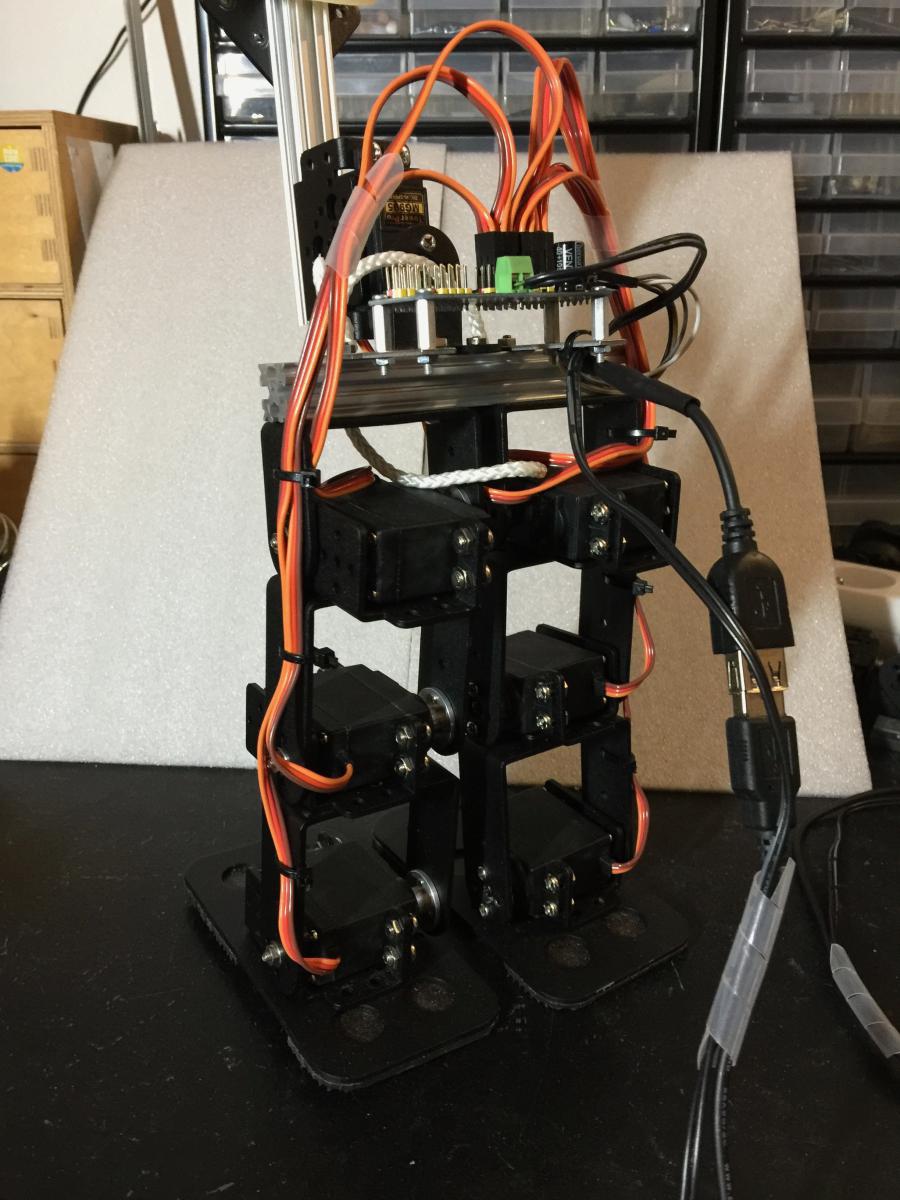
Emile ne fonctionne pas en dynamique. Il ne doit pas perdre l'équilibre.
Il a 3 axes sur chaque jambes et un bras pour basculer sur le pied d'appui. Il a la pointe des pieds plates (pieds rectangulaires). Il tient sur la pointe des pieds quand il y a un angle entre les 2 jambes.
Après, comme ses axes sont tous parallèles, il me faut une solution ou les pieds restent parallèles. J'ai pas trouvé mieux que cette solution militaire.
Je suis sur Hector en ce moment. Je fini le codage du driver pour le rplidar. Dès que c'est fait, je reviens là dessus. J'ai des trucs à voir avec Amhnemus  On en reparlera des virages du Emile façon militaire
On en reparlera des virages du Emile façon militaire