De manière fluide en programmant servo par servo, ou alors à tenter le coup avec matrices et autre trigo, surtout avec ta central inertielle tu as moyen de bien t'amuser suis sur
Tiens pour te motiver, je me doute que tu connaisses se gars, mais ça me fascine toujours autant ce qu'il a fait.
Tu as pensé au cercle de sustentation en le faisant jouer avec ta central inertielle pour trouver les points d'équilibre, cela peut être un gain de temps pour tes tests, non... ?
Il en est toujours au stade du pantin. Je suis sur le code de la grosse partie qui automatise la marche.
C'est un peu ralenti car à coté de ça, j'ai pris un boulot très prenant.
Mais c'est pas tout je fais un petit détour par l'installation du studio d'enregistrement. Certains ont plus d'infos que d'autres. J'en dirai plus sur un fil dédié.
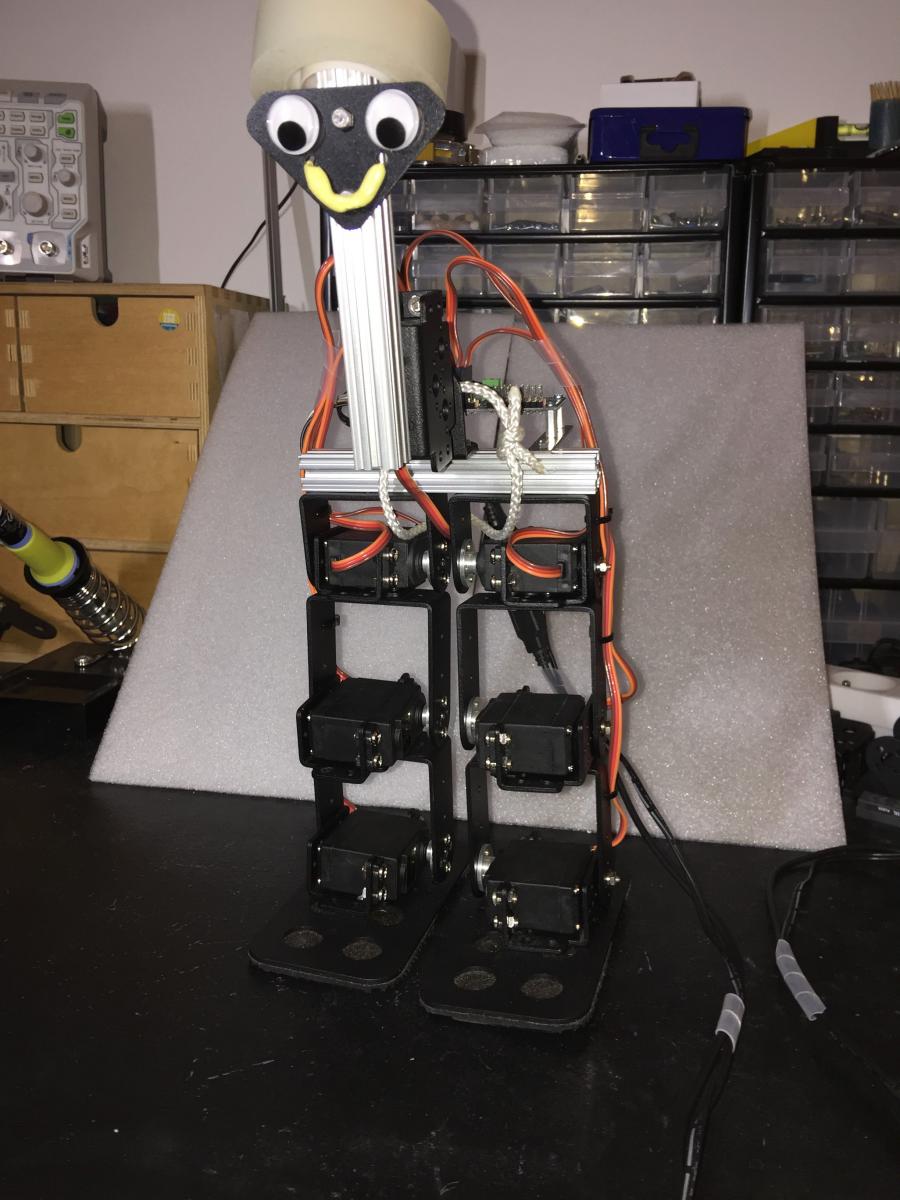
Bon ... Je dois me rendre à l'évidence, il est trop chargé ! Ne rigolez pas, je n'ai pas de balance chez moi. même pas dans ma cuisine. J'ai quand même réussi à mesurer son poids total : 2,6 kg. Pour la petite histoire, j'ai fait une balance maison. Je connaissais le poids d'un coté et j'ai mesuré les distances au pivot à l'horizontale. Il mesure environ 30 cm de haut et le couple des moteurs est de 14 kg/cm. De manière empirique, je pensais que ça passerait. Le pire, ce sont les hanches. Tant qu'il est droit et vertical, le moment est faible. Mais impossible de remonter le torse quand il est baissé pendant un mouvement. Je pensais avoir bien fait en répartissant les batteries devant et derrière mais ça passe pas.
Le mieux que j'arrive à faire, on le voit dans les posts plus haut. Comment je peux arranger les choses ?
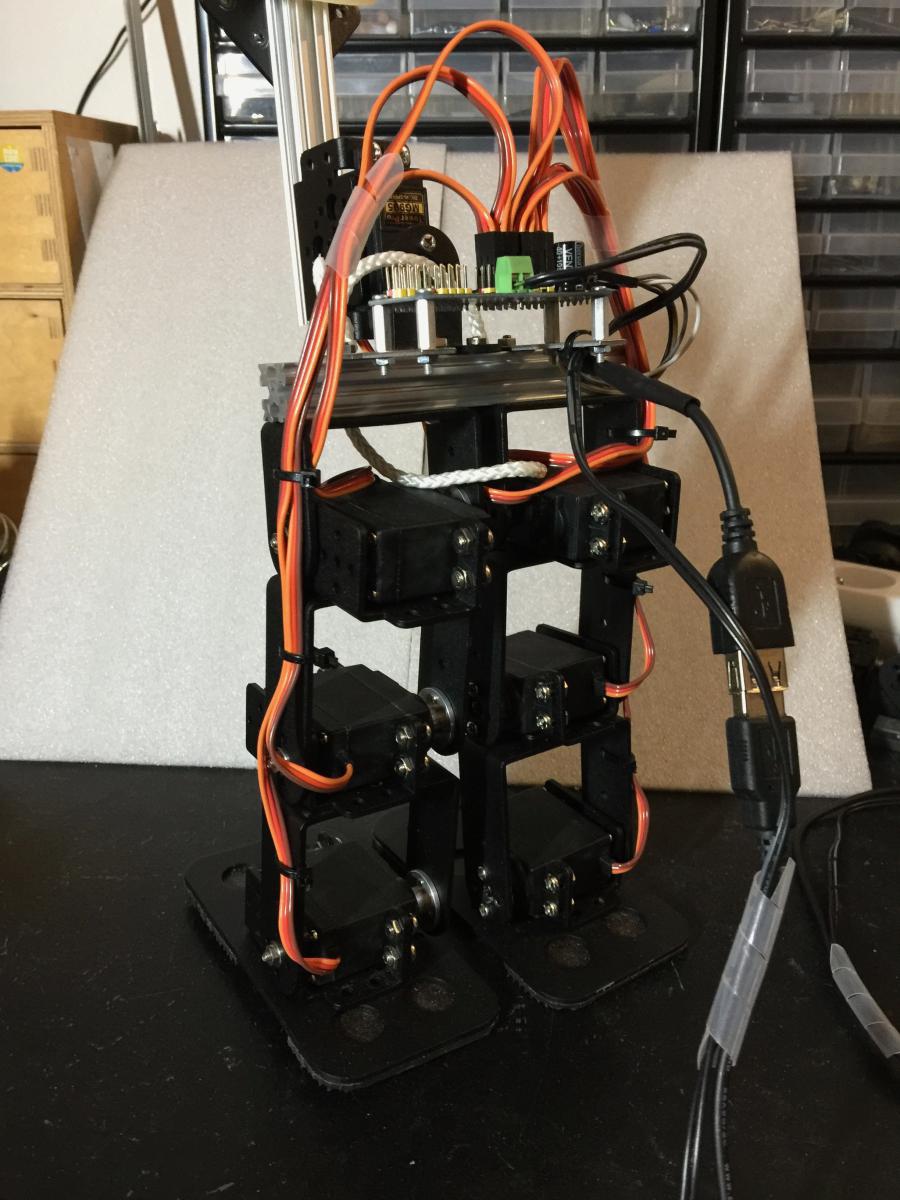
Je peux le décharger. Retirer les batteries, l'arduino mega et le circuit DC-DC. Il resterait le capteur d'inclinaison, l'écran pour les yeux (très léger), le driver des servos et le circuit de puissance. Il devrait être relié à une base fournissant l'alimentation électrique et une paire pour l'i2c. Mais je peux pas envisager que le robot ait un fil !!! c'est pas le trip.
Acheter des moteurs plus costauds pour les hanches et les genoux.
Il faudrait minimum entre 35 et 40kg/cm, compatible avec les fixations lynxmotion, 6V et pas dans les 100 € ... Je cherche ...
Avant de déclarer forfait, vous avez une autre idée ?
PS. Pas taper, je sais que le cahier des charges est important. J'en fait suffisamment au boulot !! Là, je m'amuse, j'explore. Et si il doit finir en pièces détachées C'est bien aussi.
Hhuuummmm je sais que tu as une superbe imprimante 3D, ce sera toujours plus léger pour faire tes pièces que le lynxmotion, ensuite les servos que j'utilise pour Glenn pour l'instant. :
- 2 servomoteurs JX Servo PDI-6225MG-300° , 60g, 6v, couple 25.3 kg/cm, vitesse 0.21/60° (pour l'axe X des épaules)
- 3 servomoteurs JX Servo PDI-HV5932MG-180° , 59.3g, 6v, couple 25.2 kg/cm, vitesse 0.12/85° (et bim j'avais pas fais gaffe, pour du 32.3 kg/cm il faut les brancher en 8.4v)
Ils m'ont coûté quedal (euh voir sur ali, mais moins de 30 € chaque).
Je sais, c'est pas du 40 Kg/cm, mais bon, c'est déjà plus puissant de ce que tu as...
Avec l'imprimante tu pourrais imaginer un système pour mettre les batteries au niveau des cuisses.
Oui merci pour ta réponse. Tu sais qu'on se fait toujours la gueule mon imprimante et moi. On habite toujours ensemble mais pour la faire chier, je m'équipe de plus en plus d'outils manuels. Elle, c'est certain. Elle va finir en pièces détachées. De toutes les façons j'ai besoin de place pour une petite scie circulaire qui a l'air beaucoup plus docile.
Ben après c'est un choix je le reconnais, perso dans l'imprimante 3D j'y vois plus une façon de faire des pièces sur mesure, légère et "rapidement", mais bon, ce n'est pas une fin en soi, certes.
Si tu arrives à faire autrement why not, de toutes façons le but et de se faire plaisir
Perso j'ai hâte de voir Emile bouger dans tous les sens (comme HumaOne et bien d'autres) ^^
Je cherche des solutions depuis cet été. Là, il est simplifié en bipède avec un bras au lieu de 2. 7 dof. 3 par jambes et 1 pour le bras qui fait office de tête. Initialement, je voulais conserver l'équilibre en plaçant un bras ou l'autre vers l'extérieur du robot. Là, c'est la tête qui balance d'un coté ou de l'autre pour conserver l'équilibre. J'ai aussi remis les servos des jambes sur le même axe. Pas besoin que le pied bascule autour du même axe perpendiculaire. L'alimentation et électronique sont déportées. Il ne reste que le driver 16 servos. Il y a un arduino en déporté qui est piloté par mon ordi. Le câble qui arrive au robot porte l'alimentation et la commande i2c du driver. L'arduino et le driver ont un alimentation séparée de celle des servos. Il est bcp plus léger. ... mais toujours pas stable.
Il ressemble un peu à une autruche maintenant.
Et ses belles baskets en cahoutchouc
Je constate 2 choses :
Quand je ferme le circuit d'alimentation des servos, ils prennent une brusque position aléatoire. Même si je positionne les servos sur le driver avant d'alimenter les servos.
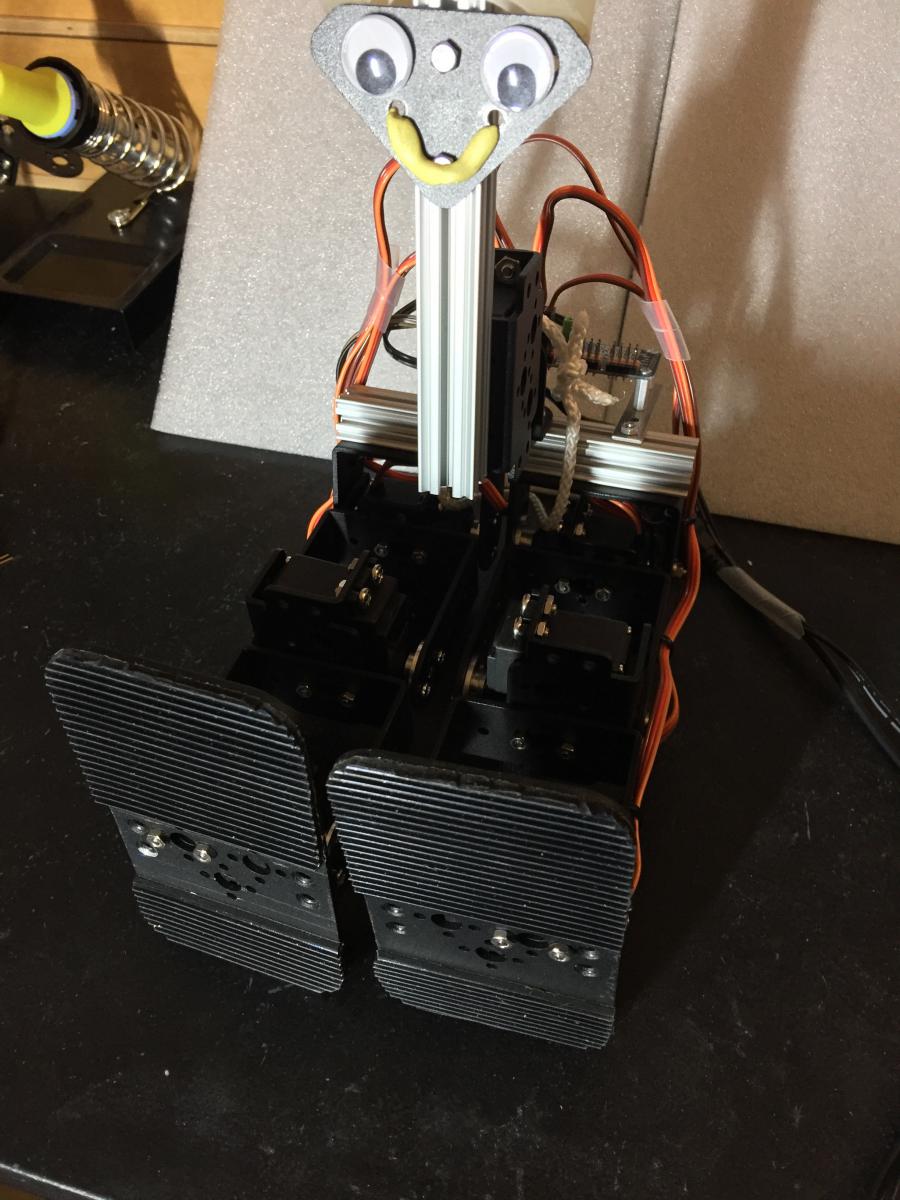
Et pour tenir une jambe à 45°, je constate une oscillation des moteurs.
L'animation n'est pas volontaire ^^ C'est l'oscillation que j'obtiens quand je lui demande de tenir une position statique.
Une fois n'est pas coutume, j'ai laissé le son.
J'ai testé avec l'ubec du shop. 5,8V. Pas mieux
J'ai changé le moteur ... pas mieux
L'alim fait 12V 5A. Mon convertisseur cc sort aussi du 5,8V 16A en théorie. J'ai un condensateur à la sortie de l'alim 5V de 3300uF + un petit de qq nano en parallèle.
Sans le condensateur, on voit des chutes de tension (des pics vers le bas) jusqu'à 4,5V.
Avec, les pics ne descendent pas en dessous de 5,5V
Bref, j'ai pas de chute de tension.
Le câble fait un mêtre.
Je retrouve mes 5,8V aux bornes du driver sur le robot. Le câble n'est pas trop long.
Les commandes fonctionnent au poil. Lui aussi n'est pas trop long.
La seule conclusion à laquelle j'arrive est que mes 995 pourtant avec un bon couple ne suffisent pas pour cette ossature lynxmotion. Ces servos peuvent entre 11 et 13kg/cm. La jambe mesure justement 13cm de haut et pèse environ 600g.
Cette conclusion me chagrine à plus d'un titre. Est-ce que j'ai loupé quelque chose ?









 Elle, c'est certain. Elle va finir en pièces détachées. De toutes les façons j'ai besoin de place pour une petite scie circulaire qui a l'air beaucoup plus docile.
Elle, c'est certain. Elle va finir en pièces détachées. De toutes les façons j'ai besoin de place pour une petite scie circulaire qui a l'air beaucoup plus docile.