Sympas le hack du boitier du cm5 pour y mettre la carte arduino ! Je n'y avait pas pensé et je retiens l'idée 

Roby/ Robot bipede basé sur le kit Bioloid Comprehensive
Débuté par Dens26, juin 16 2015 08:03
129 réponses à ce sujet
#21

Mike118
-

- Administrateur
-

- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 janvier 2016 - 12:48
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#22
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 15 janvier 2016 - 09:47
Bonjour à tous 
Merçi Mike pour le hack du boitier, fallait trouver une solution pour cette carte Arduino qui était toute moche à l'arrière
Voici quelque modification.
J'ai donc ajouté les batteries aux jambes de Roby ce qui à effectivement abaissé son centre de gravité. J'ai tout de suite fixé le deuxième jeu de batterie pour avoir le bon centre de gravité tout de suite plutôt que de coder des déplacement qui seront à réviser si ajout d'un deuxième jeu de batterie.
Moi, personnellement cela ne me choque pas. C'est pour le moment fixé avec du chatterton mais je compte les fixé avec ces coupleur ici et ici
Grâce à cela, il n'y a donc plus de cable disgracieux et il a son apparence normal
J'ai commencé à modifier les déplacement fourni d'origine par Robotis afin de vérifier son équilibre. Vidéo ci-jointe avec les animation Hello et LookAward
Image(s) jointe(s)

Fichier(s) joint(s)
-
 Roby_Salut_RegardeAutour.wmv 5,17 Mo
383 téléchargement(s)
Roby_Salut_RegardeAutour.wmv 5,17 Mo
383 téléchargement(s)
#23
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 17 janvier 2016 - 06:27
Je pense qu'il faudrait agrandir ses pieds. A force de le voir je me dit qu'il a des petits pieds 😕
#24
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 02 février 2016 - 10:06
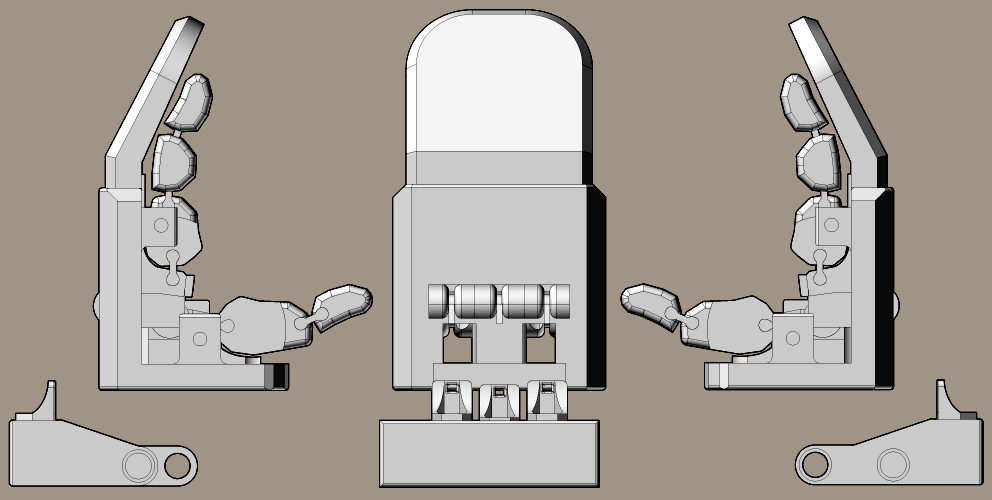
Je vous présente l'avancement concernant la main de Roby. Pour rappel la main est composée de 3 doigts (2 de 3 phalanges + 1 de 2 phalanges) fixés sur les pièces d'origine Bioloid FP04-F09 et FP04-F11
Prototype de main :

Je travail en ce moment avec un graphiste pour passer de prototype à une main finie et voici ce qu'il en ressort.
- Il faut garder une protection des doigts comme pour le prototype pour pouvoir jouer des animations tel que "se relever", ou bien encore "faire des pompes" sans exercer de pression sur les doigts qui ne sont pas conçu pour cela,
- Il faut que les doigts soient entourés d'un guide pour bien les maintenir en place et éviter qu'il sorte de leurs emplacements en cas de chocs.
- Le système de contrôle des doigts reste le même : un fil de nylon par doigt actionné par le servomoteur XL-320 tire sur les doigts. Il faut donc prévoir le passage des fils de nylon pour les faire ressortir à l'arrière.
Il fallait donc refaire une nouvelle pièce "paume de main" qui devait recevoir les doigts et se fixer sur la pièce FP04-F09 qui devait être également modifiée .
Après réflexion, nous avons décidés de fusionner les pièces ("FP04-F11", FP04-F09" et "Paume de main") en une seule tout en gardant l'esprit des pièces d'origine
Voici quelques photos du travail accompli jusqu'à aujourd'hui :
Exemple du passage des fils de nylons

Les différentes pièces qui compose la main
Version actuelle de la main

Image(s) jointe(s)

- Mike118 aime ceci
#25
yamovince
-

- Membres
-
- 300 messages
Habitué
Posté 02 février 2016 - 05:10
hyper intéressant comme projet, j'ai également comme objectif de construire une main pour un prochain projet.


#26
Mike118
-
- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 02 février 2016 - 06:28
Franchement bravo ! La finition de la pièce est nickel et les gif pour la présenter sont juste géniaux ! =)
Tu pourrais peut être vendre les plans à Robotis quand tu les aura fini pour qu'ils le fabriquent en injecté et le vendent en option standard
Sinon pour rester dans le côté diy, juste une remarque qui se veut constructive et en aucun cas une critique :
Je suppose que régler la longueur du fil pour chacun des doigts n'est pas une tache, visiblement le fil est accroché dans la phalange extrême et que le seul moyen de régler la longueur du fil est de jouer sur l'autre extrémité ... hors visiblement sur l'autre extrémité les 3 fils vont être relié ensemble... du coup c'est par principe ( à moins que tu ais une méthode particulière) délicat de le régler . As tu prévu une pièce intermédiaire afin de faciliter ce réglage ? ( En gros les 3 fils s'attachent sur cette pièce de manière indépendante , et un quatrième fil , s'attache aussi sur cette pièce et va au moteur )
Autre question as tu déjà pensé à l'élastique ou au ressort de rappel pour que les doigts s'ouvrent ? =)
En tout cas encore une fois bravo autant pour la qualité de ton travail et de ton post Bonne continuation =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#27
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 02 février 2016 - 08:34
Merci Mike, ça fait plaisir.
Concernant les fils de nylons, ils seront fixés à une autre pièce qui sera elle fixée au servomoteur comme ici sur le prototype

La pièce ici présentée est une récupération d'une autre pièce qui avait été faite pour le contrôle du coup du Robot. Une autre pièce doit être crée mais le principe restera le même.
Ça serait donc une pièce qui viendra en butée sur la main quand elle sera ouverte. Les trois fils seront donc fixés indépendamment à trois endroits différents sur cette pièce.
Pour le réglage de la longueur de fils, il est vrai que je n'ai pas prévu de système particulier donc si tu as une idée je suis preneur
#28
Mike118
-
- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 02 février 2016 - 09:25
Je ne sais pas si c'est pérenne comme solution mais as tu pensé à un domino électrique ?

En gardant les 3 dominos liés, tu as en plus les deux trous qui te permettent de le fixer sur ta pièce en plastique si tu choisis le bon type de domino.
Ainsi pour régler un doigt il te suffit de positionner le fil comme bon te semble et le bloquer avec une vis
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#29
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 02 février 2016 - 09:41
L'idée n'est pas mauvaise. Il faudrait l implémenter directement sur la pièce vu qu'il faut encore la creer
#30
Taupiot_Jr
-

- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 02 février 2016 - 09:51
Hello,
Ton projet est plein d'idées intéressantes
Pour régler la tension des cordes il m'est venu l'idée suivante, un système partant du même principe que le réglage des cordes sur une guitare.
~Taupiot_Jr
#31
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 04 février 2016 - 04:52
Concernant la tension sur le fil, je ne sais pas encore comment on va faire. Pour le moment on peaufine les détails de la main.
Je ne manquerai pas de poster le résultats 
Sinon au niveau "Animation"
Aujourd'hui "Roby" à appris à se relever en cas de chute. Les batteries sur les jambes ne l’empêche pas de se relever. Je suis assez content, c'est assez fluide
Petite vidéo à l'appui.
- Path aime ceci
#32
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 04 février 2016 - 05:25
Wow! C'est fluide
Est-ce une séquence programmée en dur ou bien il mesure et gère son équilibre?
~Taupiot_Jr
#33
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 04 février 2016 - 05:32
Wow! C'est fluide
Est-ce une séquence programmée en dur ou bien il mesure et gère son équilibre?
~Taupiot_Jr
J'aimerais bien mais non, c'est une animation programmée en dur.
Pour le moment, il ne dispose pas de capteur, une chose à la fois
Il a pas mal de chose de changé sur lui comparé à l'origine. Son centre de gravité à été modifié donc je teste son équilibre sur différentes animations
- Taupiot_Jr aime ceci
#34
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 06 février 2016 - 12:34
Petit up concernant la main de Roby
Nous en somme donc aux finitions.
Le projet est ici pour ceux qui veulent donner leur avi
Je me suis donc inspiré de l'idée de Taupiot-JR pour le réglage des fils. On à donc une piece en "U" qui vient se fixer au servomoteur. Dans cette pièce en "U", il y a trois "navettes" que l'on peut faire glisser à l'intérieur afin de régler correctement la tension des fils.
Image(s) jointe(s)

#35
Taupiot_Jr
-
- Membres
-
- 232 messages
Membre occasionnel
- Gender:Male
Posté 06 février 2016 - 06:28
Belle modélisation ^^
Par contre je ne vois pas la 1ère image, elle ne se charge pas du tout chez moi..
~Taupiot_Jr
#36
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 07 février 2016 - 12:10
Salut Dens,
j'adore ton robot. Beau boulot.
Tu me donne des idées ... pour plutard.
#37
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 17 février 2016 - 09:33
Voila modélisation terminé.

La "BaseEnL" et les Navettes en version définitives :


L'impression est lancée et prévue pour ce weekend
#38
Andarkam
-

- Membres
- 34 messages
Nouveau membre
Posté 13 avril 2016 - 12:04
Avant tout bravo pour ton travail et ton projet Dens26. J'ai suivi pas mal de topics sur les Bipeds et je trouve tes améliorations très intéressantes, notamment ton ajout de main, ce qui me donne envie de faire de même sur mon robot. J'ai hâte de voir la suite du montage aux tests de tes mains.
#39
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 10 mai 2016 - 09:59
Me Re-voila après quelques jours d'absence.
Je ne peux malheureusement pas être sur le projet autant de temps que je souhaiterai
Voici malgré tout un petit up du projet.
J'ai bien reçu le kit de main. Tout n'est pas parfait mais on se rapproche de plus en plus de l'idée. La main est donc fonctionnelle
Voici une petite vidéo
Je ne peux malheureusement pas être sur le projet autant de temps que je souhaiterai
Voici malgré tout un petit up du projet.
J'ai bien reçu le kit de main. Tout n'est pas parfait mais on se rapproche de plus en plus de l'idée. La main est donc fonctionnelle
Voici une petite vidéo
#40
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 15 septembre 2016 - 04:18
Petit up du projet.
Modification de la main de Roby
En effet, le système pour tirer les fils de nylon n'est pas très jolie, j'ai donc cherché une solution pour le cacher et voici le résultat
- Premièrement le servomoteur XL320 sera fixé sur le servomoteur AX-12 par l'arrière et non plus sur le coté

- J'ai donc du créer une nouvelle pièce pour assembler les deux servomoteur entre eux

- Une roue d'engrenage fixé sur le moteur XL320

- Une plaque de soutien de la main ainsi qu'une tige qui sera connecté à la roue
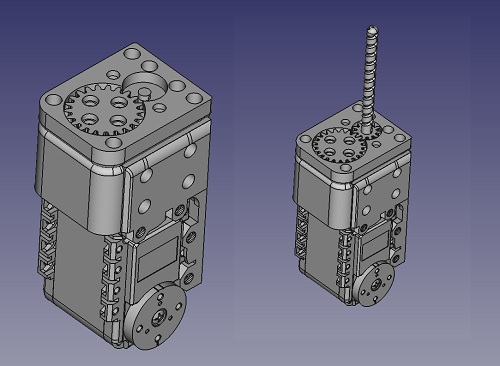
- Un pièce qui doit accueillir les doigts les doigts et une piece pour caché un peu le système

- Le guide qui va tirera sur le nylon avec deux petits renfort sur les coté
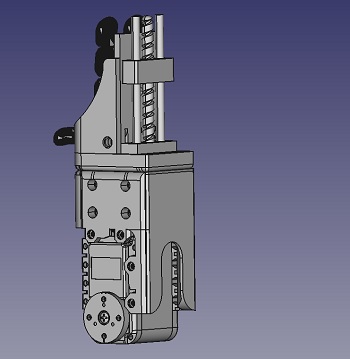
Et pour finir le cache arrière

Qu'en pensez vous?








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




