Cela avance bien, bravo !
Oui, j'aimerais bien voir les servos Dynamixel en action.

Roby/ Robot bipede basé sur le kit Bioloid Comprehensive
Débuté par Dens26, juin 16 2015 08:03
129 réponses à ce sujet
#61

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male


#63
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 24 janvier 2018 - 09:46
Salut les Makers!
Voici quelques news sur ce projet qui n'avance pas beaucoup malheureusement 
J'ai pas mal galéré avec l'incorporation du RaspberryPi dans la tête du robot et j'ai donc finalement abandonné l'idée (Tête trop grosse et trop lourde pour les petits servomoteurs XL-320)
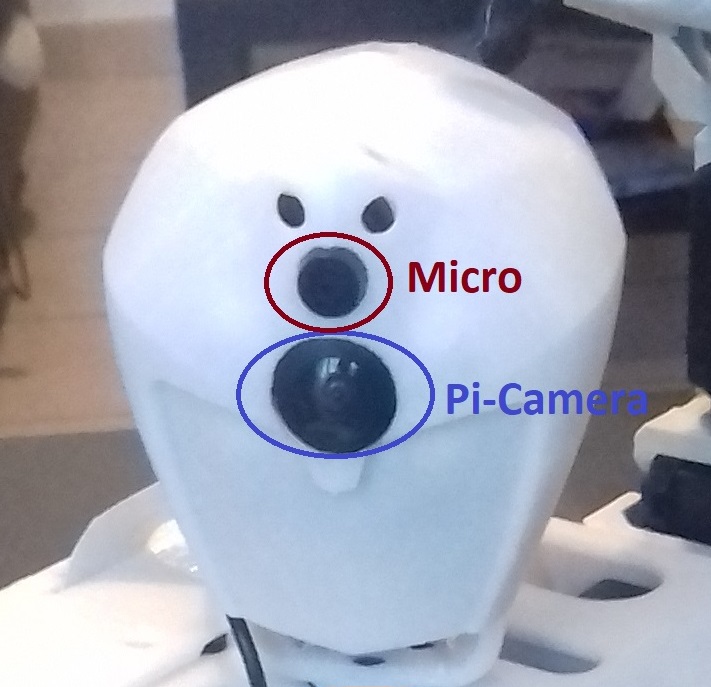
J'ai donc gardé pour la tête de Roby :
- La camera Pi-camera pour la Vue,
- Le microphone (USB) pour l’ouïe,
- Un servomoteur XL-320 pour l'axe y.
J'ai modifié le torse d'origine pour qu'il puisse accueillir :
- Un Gyroscope 3 axes MPU6050 pour la stabilité du robot,
- Un Haut parleur pour la voix
- Un servomoteur XL-320 pour l'axe x
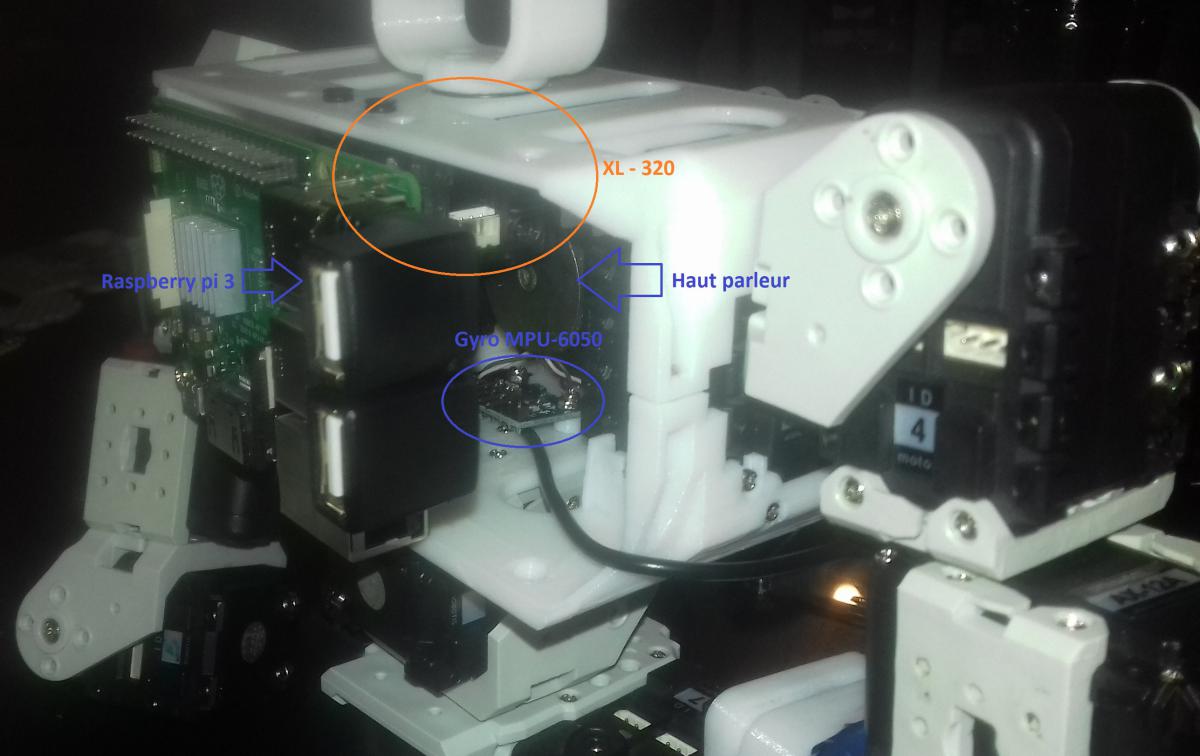
Le torse est du coup un peu plus grand à cause du HP. J'en ai profité pour l’alléger et graver le nom de Roby afin de permettre au Haut parleur de bien se faire entendre.

Le Raspberry est quand à lui logé dans la partie arrière. Deux Prise USB seront prise pour le micro et le HP et deux autres seront disponibles sur l'arrière. J'ai également prévu un petit ventilateur pour refroidir le système

J'ai décidé de commander une carte PIXL de chez Roboticia après plusieurs test non concluant pour contrôler les servomoteurs XL-320 et AX-12 simultanément.
La main de Roby :
Je suis resté sur la dernière version avec quelques améliorations


J'Attend le PIXL afin de faire les test avec le Raspberry-pi
#64
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 31 octobre 2018 - 11:22
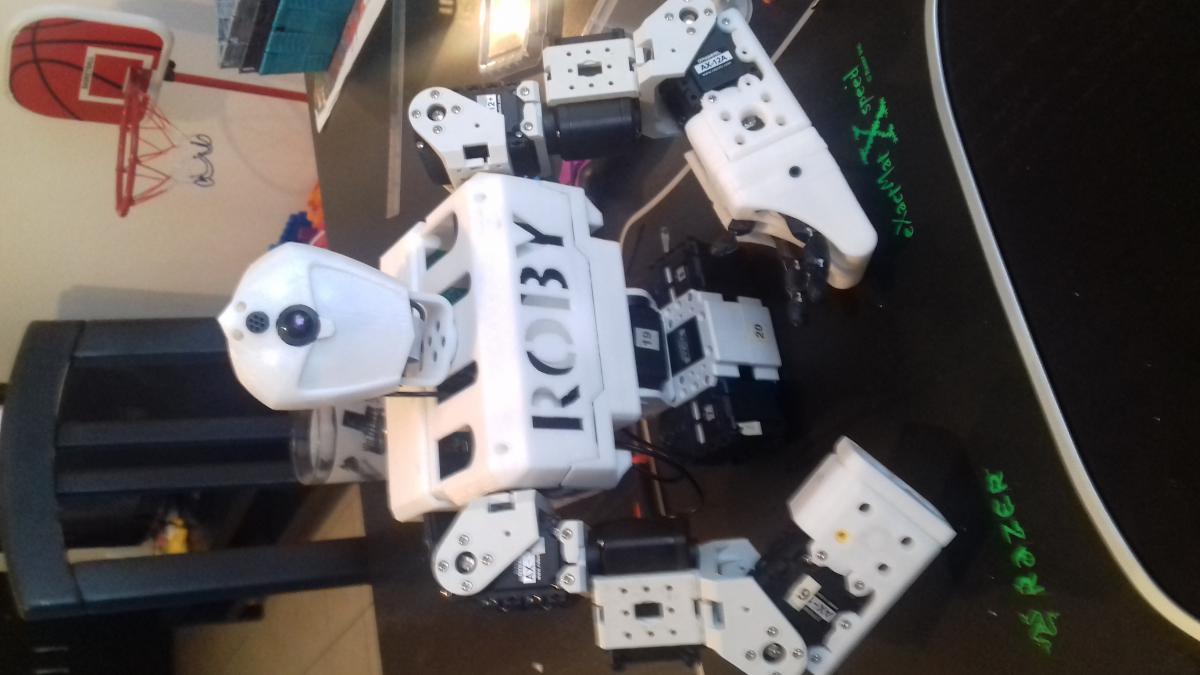
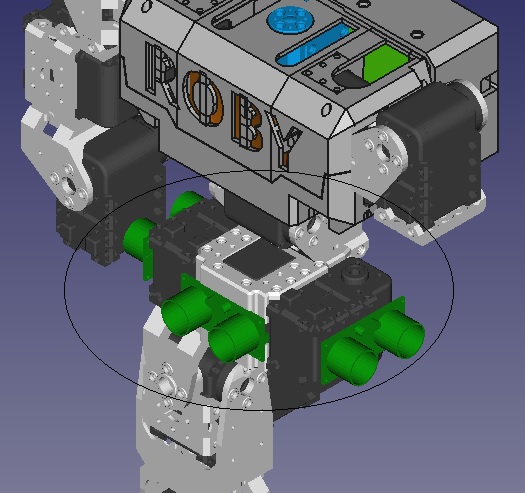
Petit aperçu de la nouvelle allure de Roby.
Roby à donc depuis la dernière version gagné :
- Une nouvelle tête qui intègre la caméra et le micro,
- Un nouveau Torse plus large pour accueillir le HP, le servo et le Gyro
- De nouvelles hanches pour élargir son bassin ce qui devrait le rendre plus stable,
- De nouveaux pieds plus grand toujours pour la stabilité du robot,
- De nouvelles mains.

Coté Hardware, il me reste à créer une ceinture qui intégrera les 3 capteurs de distance HC-SR04
#65
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 31 octobre 2018 - 12:04
Impressionnant ! Bravo !
Aurais-tu une petite vidéo à nous montrer ?
Aurais-tu une petite vidéo à nous montrer ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#66
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
#67
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 31 octobre 2018 - 02:31
Impressionnant ! Bravo !
Aurais-tu une petite vidéo à nous montrer ?
Merci,
Ça avance doucement.
Je suis occupé sur le coté Hardware pour l'instant. Il me faut modéliser la ceinture de capteur.
Des que ça sera fait je pourrai me consacrer à re-donner vie à Roby et posterai des vidéos de l'avancement.
Excellent, super sympa le taff
Ton HP fait quelle taille ?
Ceux que j'utilise au niveau de la bouche de Glenn font 23mmØ si ça t'intéresse pour gagner en place, se sont des HP pour ordi portable.
En tout cas classe ton robot, et content d'avoir des news
Merci 
J'ai de nouveau un peu de temps à consacrer au projet donc j’essaie d'avancer.
Le HP fait 50 mmØ . Il s'agit d'un HP d'enceinte USB pour ordi/tablette.
C'est vrai qu'il un peu gros comparé à la taille de Roby mais je pense que je vais rester avec celui-ci (du moins pour le moment). Pas envie de re-modéliser un pièce qui est fonctionnelle.
De plus, ça ne me choque pas que le torse soit plus large au contraire, ça permet de pouvoir élargir les hanches et de donner "en théorie" une meilleure stabilité au robot.
Sinon, super boulot avec Glenn. Il à vraiment une belle petite bouille. Ça donne envie de le reproduire
#69
Mike118
-

- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 31 octobre 2018 - 05:07
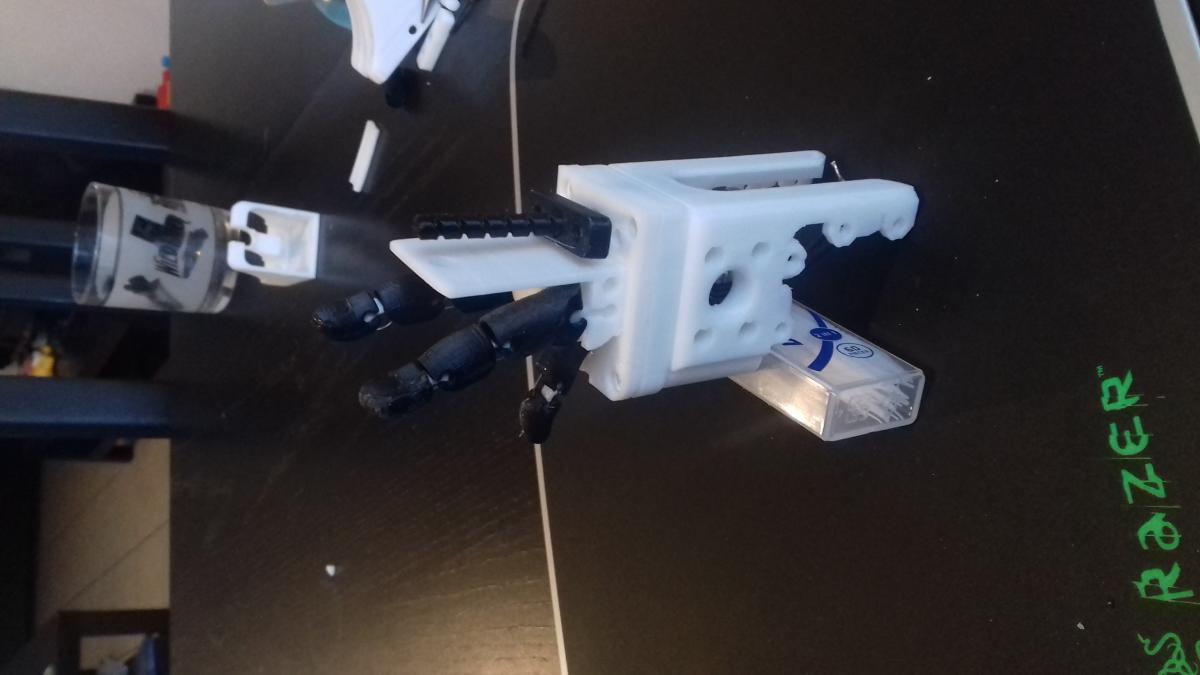
j'ai pas bien compris comment fonctionne la main, et à quoi sert l'espèce de vis noir qui est sous le capot blanc derrière les doigts.
Tu expliques ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#70
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 31 octobre 2018 - 05:46
La vis noir est entraîné par le servomoteur et permet de faire monter ou descendre le guide (rectangle noir) qui en montant tire sur trois fils de nylon relié aux doigts (Fermeture de la main).
Quand la vis tourne dans l'autre sens et fait descendre le guide, les fils de nylon se détendent (Ouverture de la main)
Quand la vis tourne dans l'autre sens et fait descendre le guide, les fils de nylon se détendent (Ouverture de la main)
#71
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 01 novembre 2018 - 01:53
Cool =)
Donc niveau moteurs si je refais le point on a :
6 servos AX12 par jambes * 2
4 servos AX12 par bras *2
2 servos AX12 pour le tronc
1 servos xl320 par mains * 2
1 servo Xl320 pour la tête
Soit 22 AX12 et 3 Xl320 ?
C'est bien ça ?
Et par curiosité, tu utilises quoi comme micro? =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#73
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 13 novembre 2018 - 01:20
Petit up du projet
J'ai bien reçu la carte PIXL qui doit alimenter et contrôler les servomoteurs AX-12 et XL-320
La fiche technique de la carte PIXL ici
- La carte PIXL sera alimentée en 12v se qui permettra d'alimenter les servomoteur AX-12 directement via ses mofset
- La carte PIXL permet d'alimenter directement la carte Raspberry pi se qui est bien pratique
- Les servomoteurs XL-320 seront alimenté du coup par le 5v de la Raspberry pi. La donnée sera envoyé par le pin data d'un mofset
Il me faut donc connecter sur le Raspberry pi :
- La carte PIXL
- Le gyro MPU 6050
- Les 3 capteurs de distance HR-SR04
Je me suis donc lancé dans la conception d'un shield spécialement étudié pour le projet
Le but est de pouvoir connecter tout cela sur le shield en prenant le moins de place possible
La carte PIXL est prévue pour s'enficher directement sur la Raspberry pi se qui m'embête un peu car je ne peux pas enficher mon shield
J'ai donc déplacé la carte PIXL pour qu'elle s'enfiche sur mon shield qui lui s'enfiche sur la Raspberry pi
Voila ce que cela donne :
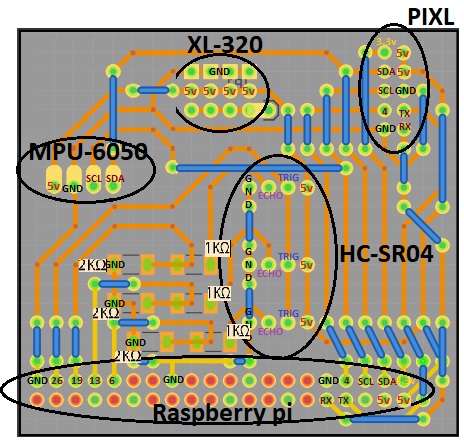
Il me reste plus qu'à attendre ma plaque epoxy cuivrée 2 face pour pouvoir tester ce shield
Pour la conception du schéma, je me suis aidé de ses deux tutos
MPU 6050 Interfacing with Raspberry pi
Mesure de distance avec un capteur HC-SR04
#74
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 28 juillet 2024 - 11:23
Salut les zamis maker.
Me voici de retour sur ce projet qui était malheureusement en suspens.
J'ai longuement réfléchi à l'idée de le reprendre, et je me suis dit qu'il serait dommage de ne pas tenter de ressusciter ce petit Roby.
J'espère pouvoir enfin le finaliser.
Reprenons ou j'en était ...
À l'époque, j'avais arrêté à cause du poids qui avait considérablement augmenté par rapport au robot Bioloid d'origine, rendant ses jambes "un peu beaucoup" trop faibles.
En effet, je m'étais concentré sur les fonctionnalités, mais une fois que j'ai commencé à redonner vie au robot, cela ne fonctionnait plus.
Pendant mes tests de marche, les servomoteurs AX-12 des jambes peinaient et finissaient par lâcher.
Je pense donc que la première chose à faire pour ce projet est de renforcer Roby en lui faisant faire quelques squats.
Voici le modèle 3D du pied revisité avec un engrenage 1:3 qui devrait permettre à Roby d'être trois fois plus résistant à sa base. Je prévois d'appliquer le même rapport de force aux genoux, qui supportent également beaucoup de poids.
Je pense que je pourrais opter pour un rapport 1:2 pour les hanches et le torse, tout en conservant les servomoteurs de base pour le reste.
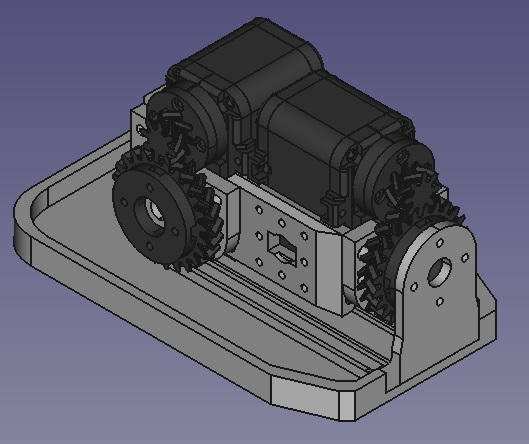
Des que j'aurais finaliser la modélisation et l'assemblage je ferait quelques test de force pour mesurer la différence.
#75
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 31 juillet 2024 - 03:42
Je vous donne des nouvelles de l'avancement du renforcement des jambes
Voici le nouveau pieds à coté de l'ancien. J'ai essayé de ne trop grossir le pieds avec l'ajout des engrenage
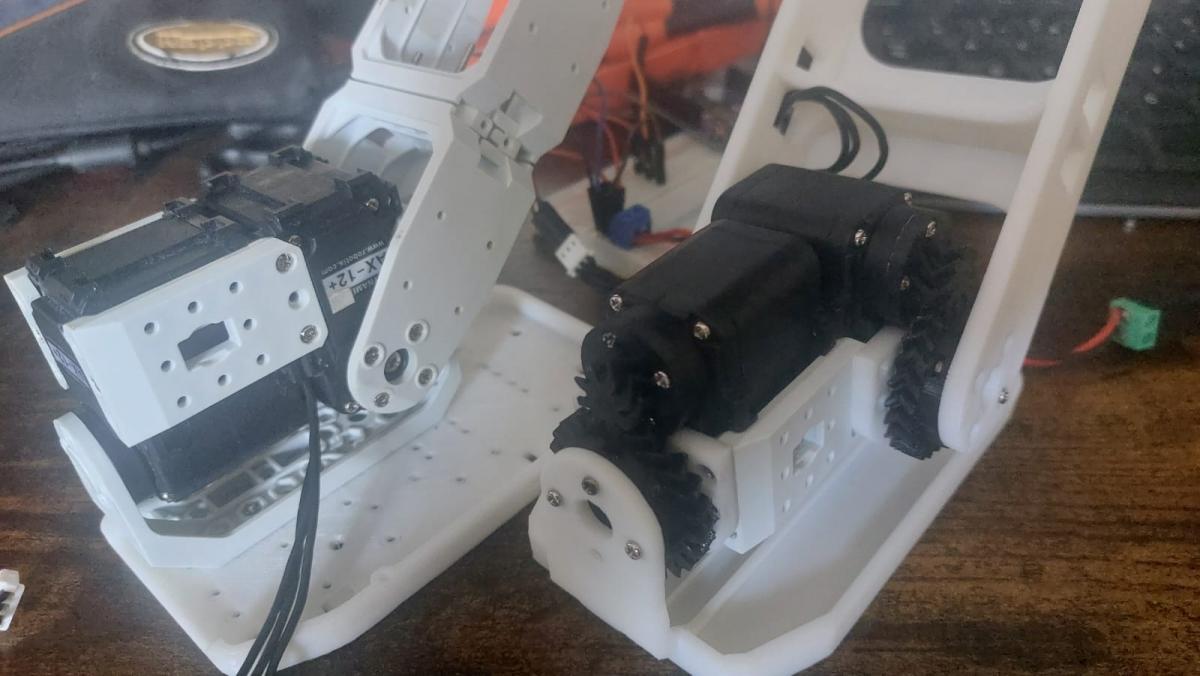
Résultat de test
Premier pied d'origine avec un angle à 45° a tenu le coup avec un poids suspendu de 1000g et 20 seconde avec 1500 g
Deuxième pieds avec le même angle de 45° a tenu le coup avec les 1500g. J'ai voulu tenter 2500g et il à tenu à peine 5 seconde. les crans de l'engrenage au sauté.
Je pense qu'il soit nécessaire de faire des engrenage plus résistant
#76
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 31 juillet 2024 - 06:06
Des engrenages en métal, peut-être ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#77
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 31 juillet 2024 - 09:47
C'est sur qu'en métal ça serait plus costaud. Par contre pas évident à concevoir :s
#78
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 août 2024 - 06:15
Perso, je pense qu'en mode servo, il vaut mieux directement lier le palonnier à l'articulation.
C'est ce qui est fait dans le reste de ton robot, me semble t-il.
C'est quand même, beaucoup plus simple.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#79
Dens26
-
- Membres
-
- 134 messages
Membre occasionnel
- Gender:Male
Posté 01 août 2024 - 09:59
Lié directement les servos aux articulations ? Oui mais du coup je ne peux pas modifier le couple moteur . J'ai besoin de passer par les engrenage pour démultiplier le couple.
Pour le test j'ai imprimé les engrenages en chevron avec module 1.25 et un angle d'hélice de 30°.
Sois je tente une version à denture droite ou une version chevron mais avec module de 2.5 et un angle de 45°
Pour le test j'ai imprimé les engrenages en chevron avec module 1.25 et un angle d'hélice de 30°.
Sois je tente une version à denture droite ou une version chevron mais avec module de 2.5 et un angle de 45°
#80
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 août 2024 - 06:22
Oui mais du coup je ne peux pas modifier le couple moteur .
C'est pourtant ce que tu fais pour les autres articulations.
Je comprends bien ton besoin de couple.
Un servo plus puissant serait sans doute plus cher. C'est bien ça, le problème ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

