Bonjour/Bonsoir/Salut !
Comme l'indique le nom de cette section, je vais vous présenter le début de mon prototype de robot quadrupède 
Celui-ci ne sera peut être jamais achevé/foireux/super ?, et a pour unique but de m'initier à la robotique.
Le cahier des charges est simple : il n'y en pas vraimant. Il se dessine au fur et à mesure.
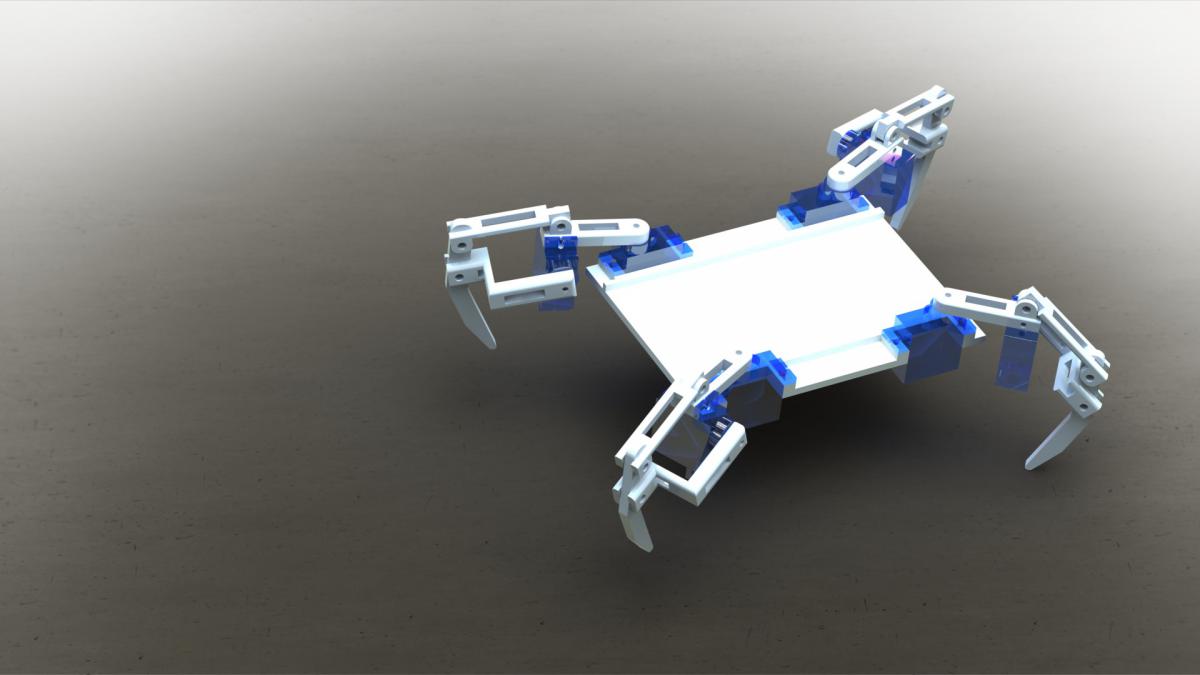
Le prototype de robot que je vise est un robot quadrupède simple, qui pourrait se déplacer de façon pas trop chaotique, selon
un patern bête et méchant inscrit dans le code.
Pour le moment, j'ai réalisé un model 3D sous SolidWorks, afin de pouvoir imprimer les différents éléments de châssis de mon
robot:
Mon système de bras, plutôt banal :
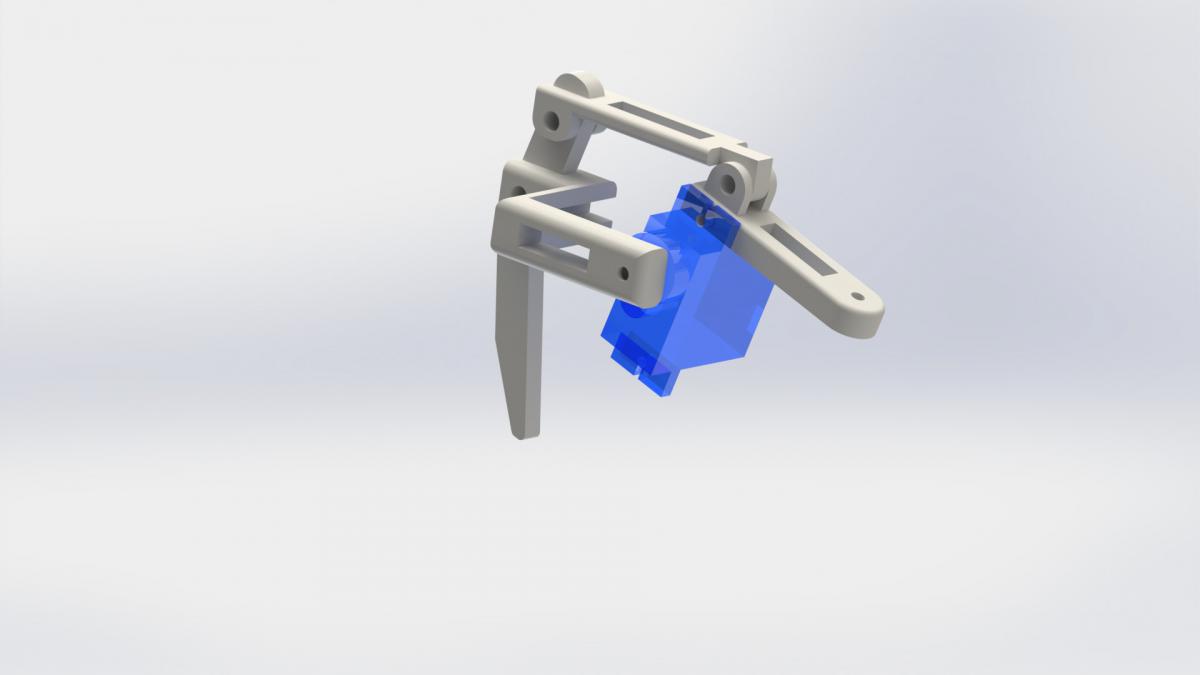
Comme on peut l’apercevoir sur le model, je compte utiliser des servo-moteurs SG90 TowerPro (au nombre de 8). Aucun dimensionnement de ma part  . Ils coûtaient juste pas chère.
. Ils coûtaient juste pas chère.
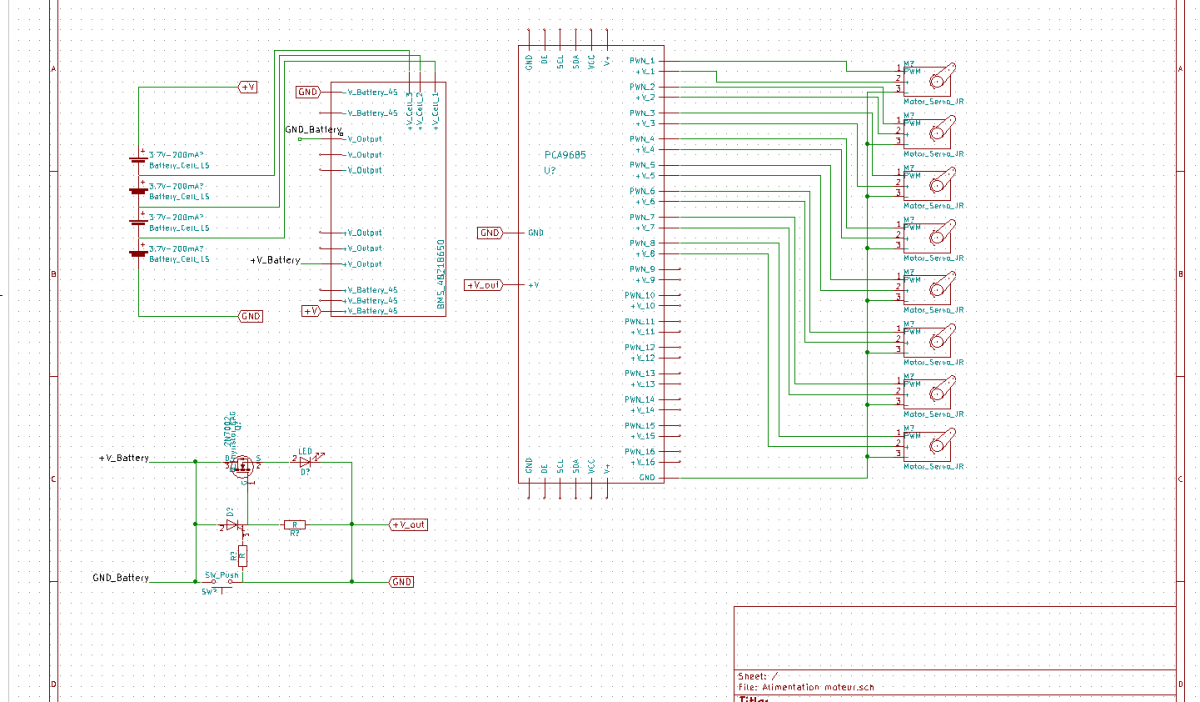
Partie électronique de commande, je compte utiliser pour le moment une carte type arduino (GeekCreit) avec un
module PCA9685 :
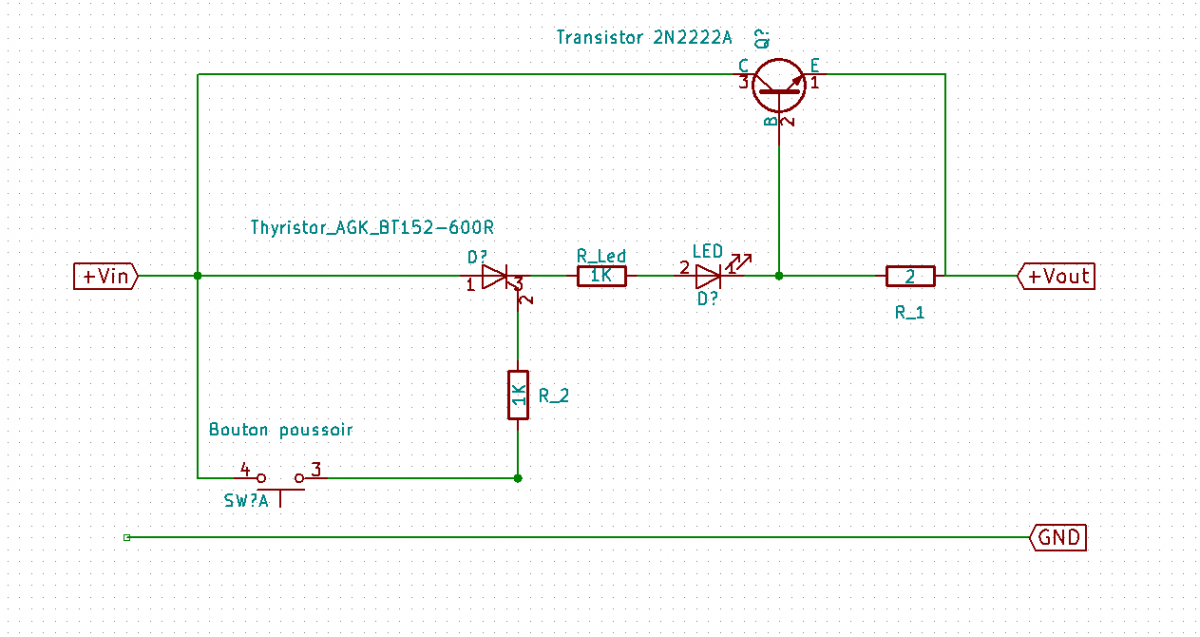
Niveau puissance, mon choix s'oriente pour le moment vers une alim Lipo 3S ou 4S, un Battery Management System 4S et un petit montage fait maison
pour limiter le courant dans le circuit.
- Les Lipo : https://fr.aliexpres...2311.0.0.IVSZbR
- Le BMS 4S : https://fr.aliexpres...2311.0.0.IVSZbR
Le tout résumé dans un schéma électrique de bidouille :
Voilà une rapide présentation
Je détaillerai surement mes démarches par la suite pour avoir un max de conseils de votre part, ou partager ce que j'ai fait si c'est pas trop foireux ^^.
Sur ce, bonne soirée