

Bonjour
je voudrais des conseils sur les équipements dont j'aurais besoin.
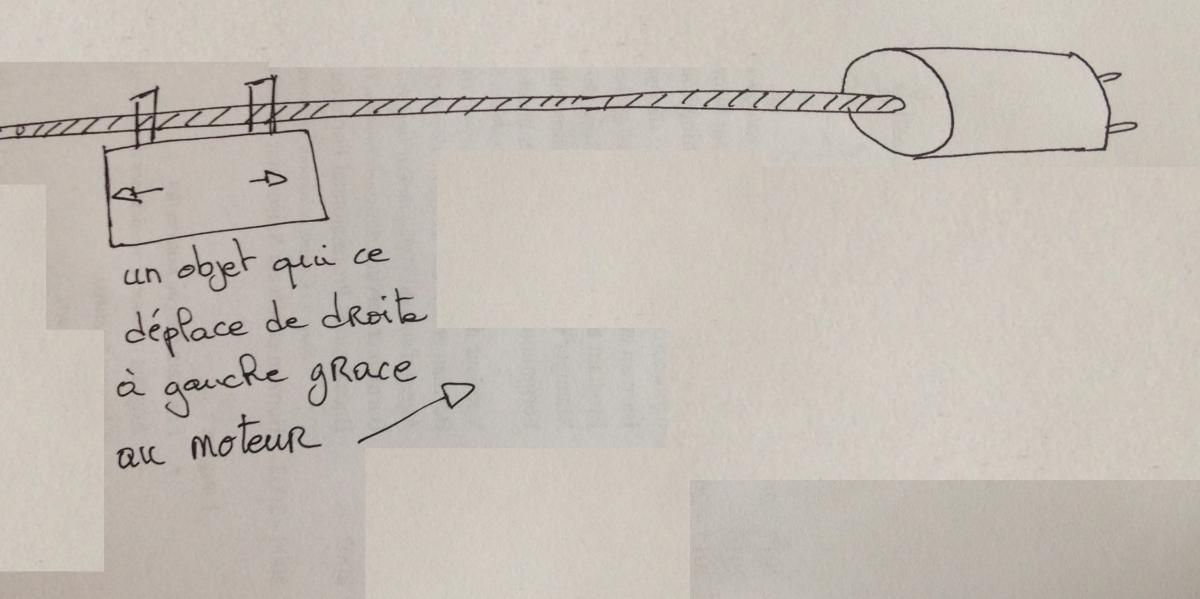
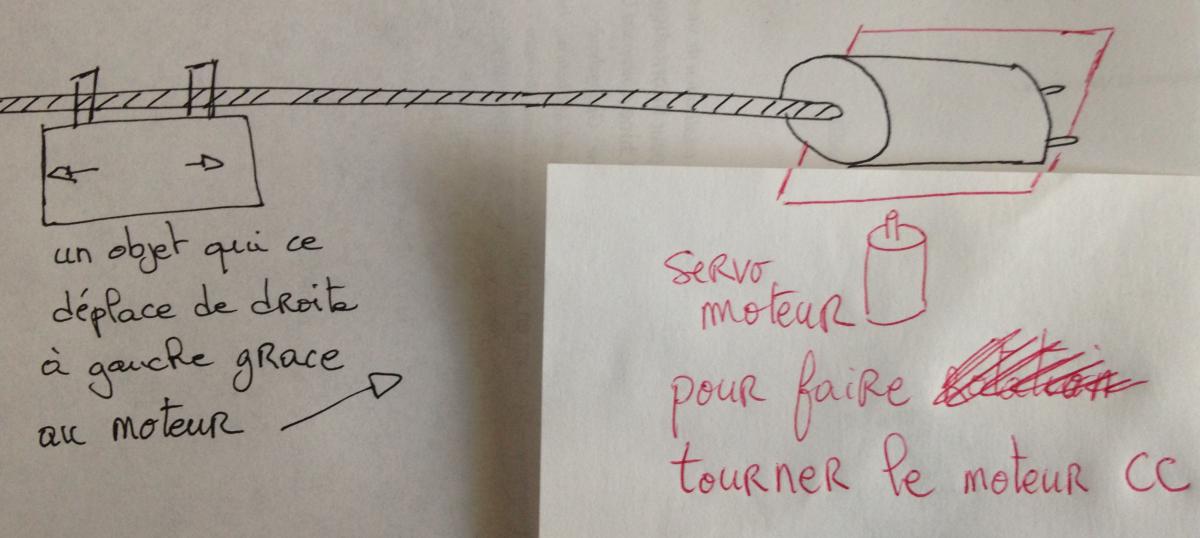
je sais uniquement que je souhaite utiliser 6 petits moteur CC : "N20"


ces moteurs seront en "parallèle", en "miroir", a savoir 3 a gauche et 3 a droite.
4 moteurs devront pouvoir changer de sens de rotation
2 moteurs tournerons tj dans le même sens.
Tous ces moteurs s’activeront avec un seul interrupteur.
je voudrais des conseils pour le reste des équipements dont j'aurais besoin... :
- quelle carte arduino??
- quelles autres materiels? pour les piles, pour les sécurité,
tous les conseils sont les biens venu 























{kind=link}