et bien sur ton image avec les différentes versions, celui que je trouve le mieux "proportionné" c'est le deuxième en partant de la gauche
C'est dû au fait que le capteur infrarouge est mieux proportionné par rapport à l'EV3. Je pense qu'il ne faut pas s'attacher à l'esthétique. J'ai bien pensé faire une tête plus sympathique, pour avoir plus de succès auprès des médias à Toulouse, mais j'hésite.
question : Pourquoi un quadripède ?
Parce que je pense que pour moi, un bipède est hors d'atteinte. Pour un 6 pattes ? Disons que je suis plus attiré par un vertébré que par un insecte. Pour le 3 pattes, je n'y ai jamais pensé, mais pourquoi pas. J'ai vu quelques vidéos, effectivement cela peu être intéressant.
Je voudrais faire beaucoup de chose. Il faut bien choisir.
Nouvelle version avec des pattes beaucoup plus grandes, soit 18cm au lieu de 15cm précédemment. La vitesse est conservé, à 35" pour 10m. Quelques petits problèmes d'ultrasons quand il y a du vent.
Caractéristiques : - Poids : 900g - Taille du corps, longueur 37cm, largeur 32cm - Pattes : 18cm - 2 servos alimentés en 7,4V par l'EV3. (caractéristiques en 9V: 175RPM, 4,5kg.cm - un EV3
Là, je n'utilise pas le détecteur à ultrasons pour détecter le portique, il pose trop de problèmes. Il s'agit d'une simple temporisation. Je pense que c'est ce que je vais faire à Toulouse. Comme Big Toy ne va pas très droit, je l'ai affublé de petite moustaches avec des roulettes à leur extrémités qui le remettent sur le droit chemin en prenant appui sur les bastaings. C'est une configuration identique à celle de Toulouse.
Depuis quelques temps, j'ai levé le pied sur les réalisations en mettant plutôt l'accent sur des recherches de la cinématique de la marche. Le meilleur exemple est sans doute le marcheur de Theo Jansen, mais en cherchant un peu, j'en ai trouvé beaucoup d'autres, sans parler des mécanismes comme Little Toy ou Big Toy qui sont d'auteurs inconnus.
Sur YouTube on voit beaucoup de modélisations de cinématiques déjà connus, beaucoup plus rarement, voir très rarement, de concepts originaux. Pourtant, les logiciels de CAO ont pour vocation de créer et non pas systématiquement de copier ce qui à déjà été fait au XIXe siècle avec une feuille de papier et un crayon. Le problème, c'est que même avec un logiciel comme Algodoo, https://www.robot-ma...ation-physique/, la conception est fastidieuse. J'ai donc imaginé un système permettant de concevoir et de pouvoir modifier une cinématique très rapidement, cela grace à un processeur hors pair, notre cerveau, et une poignée de Lego. J'en reparlerai, bien entendu. Dernièrement, j'ai découvert que ce sujet était vraiment d'actualité et très étudié par des chercheurs comme ceux de Disney Research, voir la vidéo plus bas. Le problème, c'est qu'à ma connaissance, ce logiciel n'est pas disponible et ne sera sans doute pas gratuit.
Bien sûr, je pourrais faire un quadrupède à la manière de James Bruton ou de Boston Dynamics, mais j'ai un doute. Avec les moyens à notre disposition, est-il raisonnable de mettre un actionneur lourd et cher à chaque articulation alors que d'autres systèmes purement mécaniques donnent un très bon résultat. Le Bio mimétisme doit-il être une référence absolue ? Je ne crois pas ! En attendant de faire mieux, la mécanique propose déjà des solutions très efficaces.
Voilà, moi, je fais des choses à ma porté, du plus simple au plus compliqué.
Cela fait une semaine que dès l'aube je me jette sur le logiciel Linkage, https://www.robot-ma...la-cinematique/ Voici un premier résultat. L'originalité des 2 mouvements(linkage, en anglais) que je propose est que le losange est doublé. Cela a l'avantage de résoudre un problème assez tordu. Alors que les cotés du losange interne se croisent, le losange externe garantie la rigidité de l'ensemble. Il faut pratiquer pour se rendre compte. Si l'on veut que le mouvement dessine une ligne droite au sol, il faut ruser. Je m'en suis rendu compte en regardant un grand nombre de mouvements existants, en particulier sur Algodoo. Je pense que les 2 mouvements que je propose sont originaux, mais il existe tellement de variantes dans ce domaine que je n'ai aucune certitude. Je n'utiliserai pas l'un de ces 2 mouvements dans mon prochain quadrupède. Je vais certainement opter pour quelque chose de plus simple, mais il faudra faire des compromis sur la planéité, du contact au sol.
Je suis vraiment très content d'avoir réussi à faire ce nouveau mouvement avec seulement 6 segments plus la manivelle. Pour mémoire, le mouvement de Theo Jansen qui est une référence en la matière, compte 10 segments plus la manivelle.
Le secret de ce mouvement est qu'il n'est pas basé sur un losange mais sur un "cerf-volant". Habituellement, le losange nécessite un point d'ancrage sur le sommet du haut(voir ma précédente vidéo). Ici, nous avons 2 points d'ancrage. C'est toute l'originalité de ce mouvement et c'est ce qui permet de faire cette belle courbe, très plate dans la partie basse.
J'y ai passé des heures, chaque jour. L'enseignement que je tire de ce genre d'exercice, c'est que l'on peut faire un grand nombre de formes telles que ligne droite, cercle, toutes sortes d'ovales et donc cames. Mais il arrive très souvent que l'on fasse des figures extravagantes qui devraient certainement avoir leur utilité. On pourrait croire que les figures sont simples, mais non ! Par hazard, on génère une multitude de circonvolutions en plusieurs tours de manivelle. C'est vraiment passionnant et je comprends maintenant pourquoi autant de personnes se sont passionnées dans cette discipline.
Cette fois, je pense avoir trouvé un bon et simple model de patte pour mon futur quadrupède.
"Cette fois, je pense avoir trouvé un bon et simple model de patte pour mon futur quadrupède."
*Vas tu faire cela en lego ? Je suppose qu'il faut une grande précision dans la longueur des segments, est-ce possible en lego ? les distances entre trous ne permettent pas vraiment de faire ce qu'on veut.
*Je n'ai pas tout saisi, le logiciel qui permet de faire ces études est-il téléchargeable et executable sous windows ?
*Vas tu faire cela en lego ? Je suppose qu'il faut une grande précision dans la longueur des segments, est-ce possible en lego ? les distances entre trous ne permettent pas vraiment de faire ce qu'on veut. *Je n'ai pas tout saisi, le logiciel qui permet de faire ces études est-il téléchargeable et executable sous windows ?
Oui, je vais faire cela en Lego, mais peut-être avec des axes quitte à les couper à la bonne dimension, plutôt que des poutres. A voir. Oui, il faut une très grande précision. Le logiciel n'existe que pour Windows, voir ici, https://www.robot-ma...la-cinematique/
Alors oui mais non, sur le prince de Théo Jensen il y a 7 articulations en tout, sur ton système il y en a 9
C'est vrai, tu as raison. Je n'y avais pas pensé en terme d'articulations. Pour Theo, 6 plus le moteur. Pour moi, 8 plus le moteur. Pour les problèmes de couple, c'est mon prochain sujet. Pour être complet, il faudrait faire une comparaison entre mon mouvement et le mien. cela peut prendre beaucoup de temps et je ne pense pas que je le ferai. Je me base sur le fait que les particuliers, Lego et autres, ont souvent fait du Theo Jansen, alors que les Universités, les écoles d'ingénieurs et les professionnels ont souvent réalisé des mécanismes en losange. C'est d'ailleurs pour cette raison que j'ai privilégié le losange.
La tu montres un robot qui effectivement utilise un mécanisme "en losange", mais avec deux degrés de liberté, c'est à mon avis complémtement différent d'un mécanisme qui n'en a qu'un.
D'ailleurs sur ces robots, les moteurs ne font jamais (il me semble) de tour complet, et on revient à une remarque que j'avais faite (pe sur le post du logiciel linkage), avec un seul degré de liberté (une rotation), le mécanisme ne peut pas "couper court" pour changer de position, pour aller d'un point A à B sur sa courbe, il n'a que deux choix, tourner dans un sens ou l'autre.
Avec deux, on est plus obligé de faire ce genre de compromis (moins obligé).
Puis surtout, avec deux, l'espace atteignable est vraiment meileur (si ya un caillou, on peut remonter la patte, ce qu'un mécnaisme avec un seul degré de liberté ne pourra faire).
Par contre continues tes recherches sur le domaine, je trouve cela intéressant, et d'ailleurs les robots de Theo Jensen sont vraiment impressionnants, j'ai toujours eu un faible pour eux mêmes s'ils ont énormément de limitations!
Non, non ! On est complètement d'accord. Je montrais ce mécanisme en losange, simplement pour montrer que ce type de mécanique avait été utilisé, plutôt qu'une mécanique strictement biomimétique comme Spot Mini.
Si j'étudie ce type de mécanisme, c'est tout à fait par hazard. Il se trouve que mes premiers quadrupèdes qui m'ont servi à me lancer dans l'aventure utilisaient une mécanique du type Hoeken. J'ai fait le lien avec Theo Jansen que je connaissais déjà et pour qui j'ai une grande admiration, puis avec d'autres mouvements du XIXe et du XXe siècle. J'ai tout de suite constaté les limites de mon dernier quadrupède, Big Toy, même si c'était assez efficace. Mais si je veux évoluer sans griller les étapes, je doit être capable de faire ce type de quadrupède mais avec un mouvement plus efficace.
Je pense que si je ne parviens pas à faire quelque chose de simple, je ne parviendrai pas, non plus, à faire quelque chose de plus compliqué. Il suffit d'aller sur le site d'Algodoo pour voir que beaucoup de monde s'est essayé à ce type d'exercice en proposant des choses impressionnantes.
Voici une vidéo qui vous montrera jusqu'où on peut aller avec ce type de mécanisme. Si vous avez la patience de tout regarder.
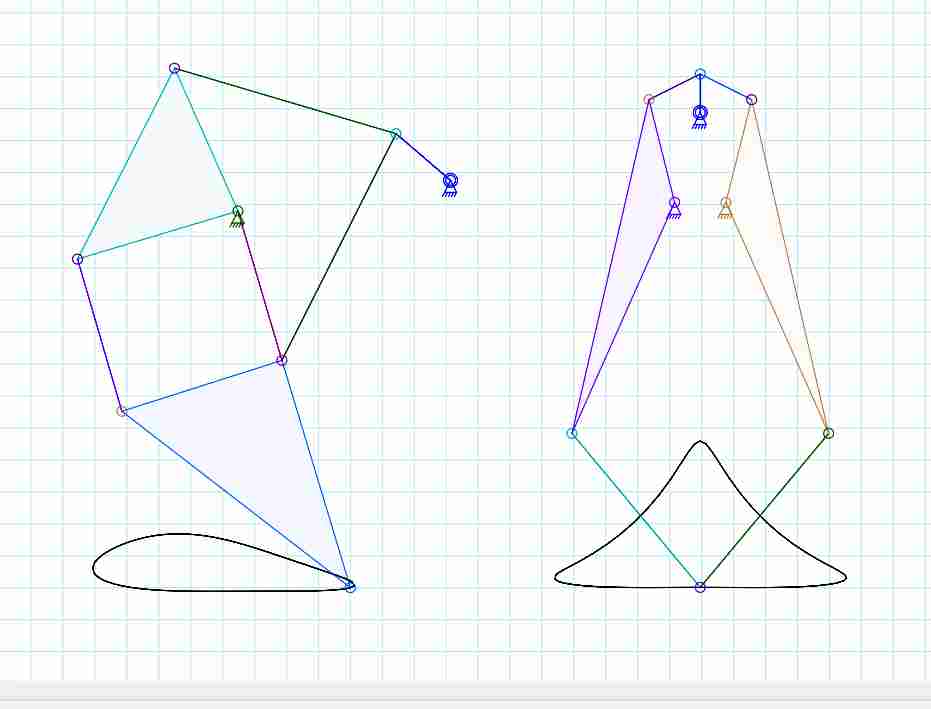
Voici une image avec mon mouvement ainsi que celui de Theo Jansen à la même échelle. Je me suis dit que peut-être cela vous intéresserait d'évaluer quel était celui qui nécessiterait le plus de couple. Personnellement, j'en suis bien incapable.
Alors la, moi je sais pas dire (ni faire d'ailleurs ).
Par contre une remarque en passant le mouvement Jansen est il me semble plus proche des courbes d'une marche "biologique", avec peu de remontée. La tienne me fait penser à un quadripod star wars (mais j'ai jamais étudié lors marche hein ), quoi je me dis que ça doit ressembler à ça...
Il s'agit ici de l'exemple donner par le logiciel Linkage, mais dans mon banc de test, par exemple, https://www.robot-ma...our-quadrupede/à 8'50", il est dans l'autre sens. Je me suis évertué à faire ce chapeau pointu car c'est ce que montre Theo Jansen dans sa dernière vidéo, un clin d'oeil en quelque sorte. On peut faire toutes sortes de courbes, le réglage est au millimètre, cela fait d'ailleurs parti du problème, mais cela peut être vu également comme un avantage. Avec cette courbe en chapeau pointu, la remontée est très rapide, ce qui devrait permettre le sautillement. A voir.
Oui, je vais faire cela en Lego, mais peut-être avec des axes quitte à les couper à la bonne dimension, plutôt que des poutres. A voir.
Oui, il faut une très grande précision.
Le logiciel n'existe que pour Windows, voir ici, https://www.robot-ma...la-cinematique/
Très intéressant, ça donne envie de faire des robots qui marchent, ce que je n'ai jamais essayé de faire. Le logiciel est-il facilement compréhensible ou faut-il avoir de solides bases en mécanique , ou encore avoir des restes à ce niveau là ?