C'est ici que nous parlerons de tout ce qui touche au câblage et au choix des composants du servomoteur à rotation continue I²C.
choix des composants :
1 moteur DC avec réducteur et encodeur (les valeurs définitives restent à définir on devrait pouvoir utiliser des moteurs de 5V à 12V sans difficulté)
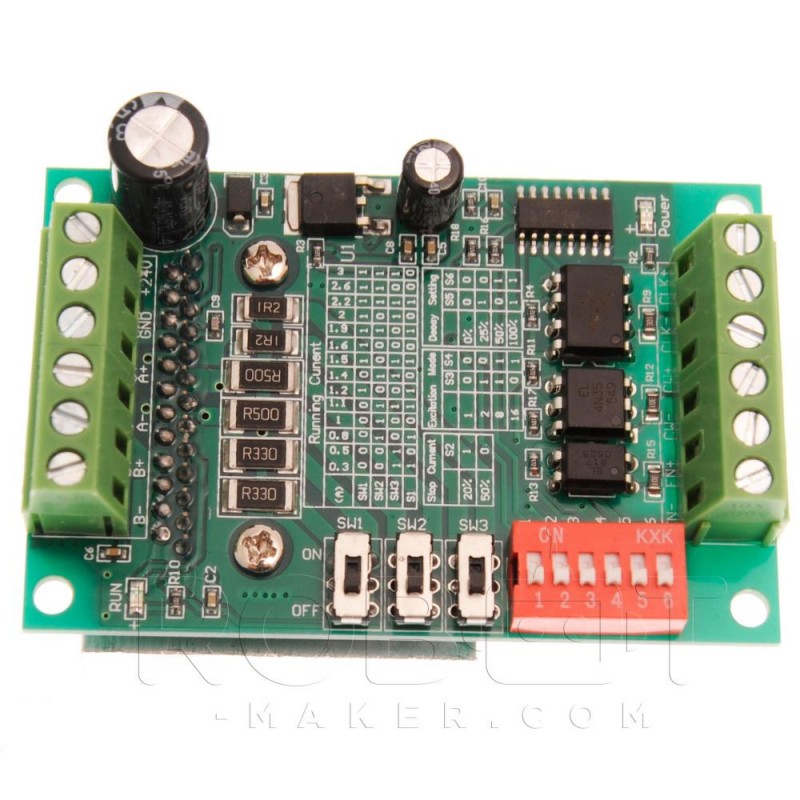
1 driver pour moteur DC L9110
1 clone arduino nano
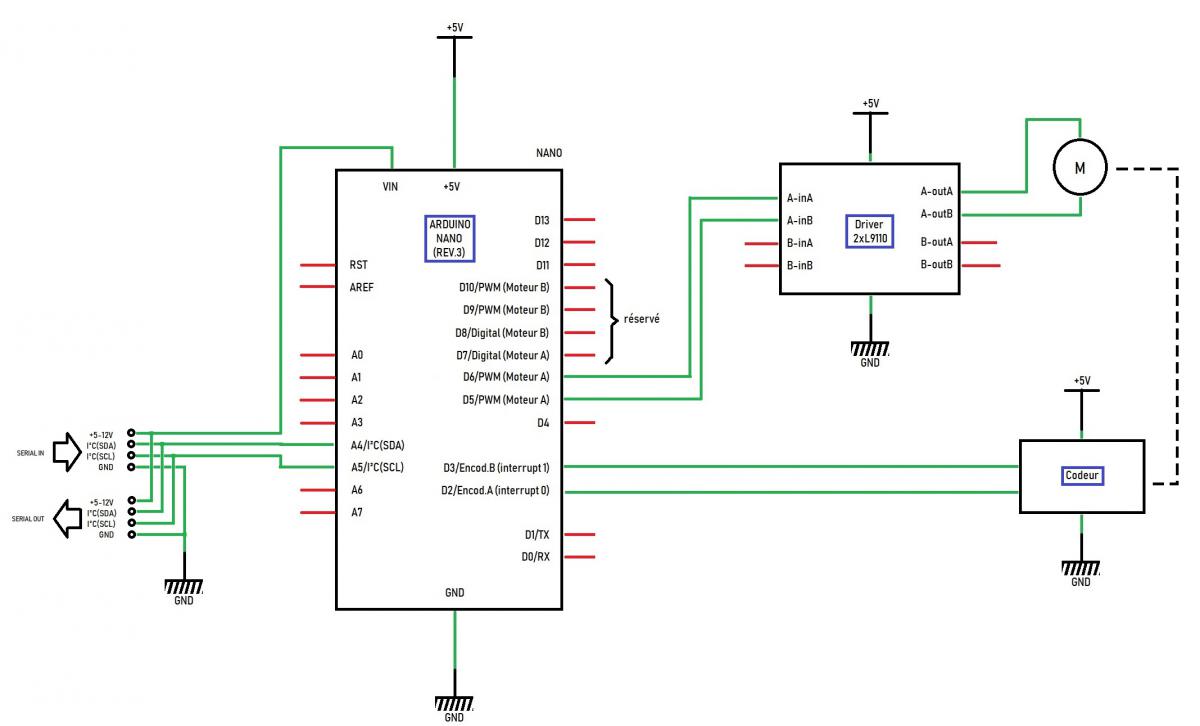
schéma :
ce n'est encore qu'un premier jet juste pour pour présenter le principe.
Spoiler
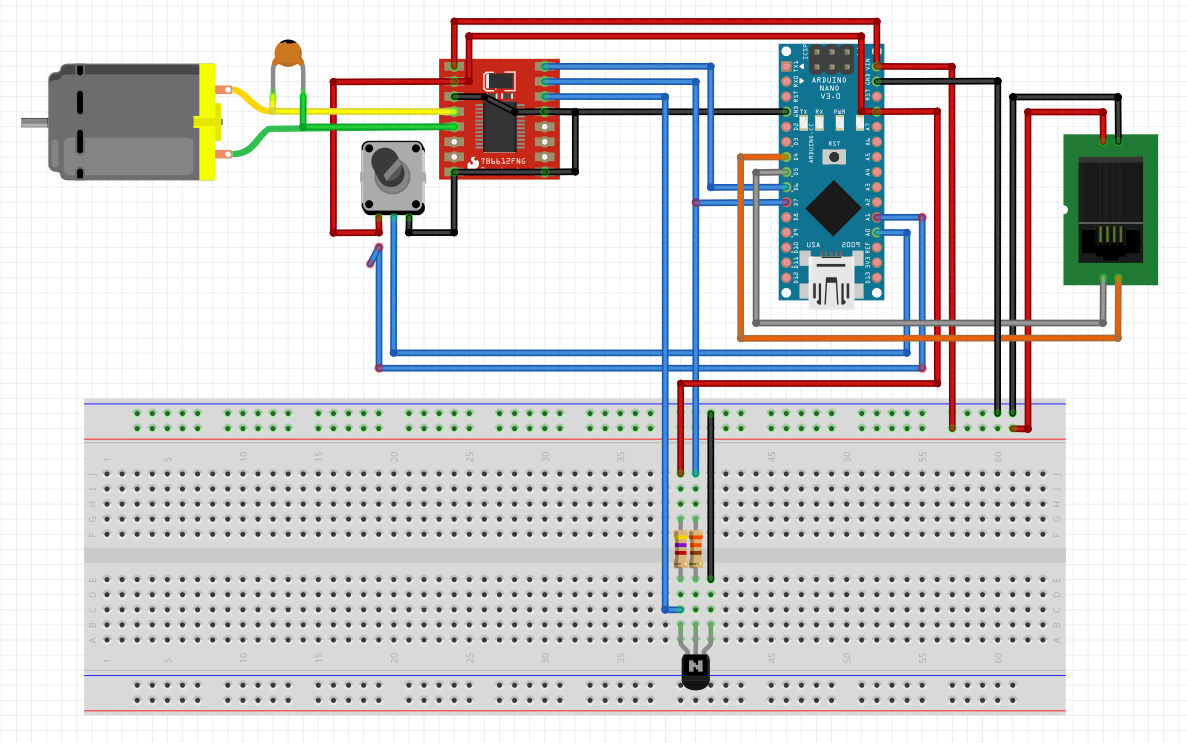

 Y a pas de mal. Perso, j'utilise pas non plus fritzing. Je fais ça avec un logiciel de présentation genre powerpoint. On a pas des schémas de fous
Y a pas de mal. Perso, j'utilise pas non plus fritzing. Je fais ça avec un logiciel de présentation genre powerpoint. On a pas des schémas de fous