
Salut.
J avais rate ce sujet... une réalisation de malade !
Je suis admiratif ... je suis le sujet et passe voir ton blog ASAP 😁
@+
Zav

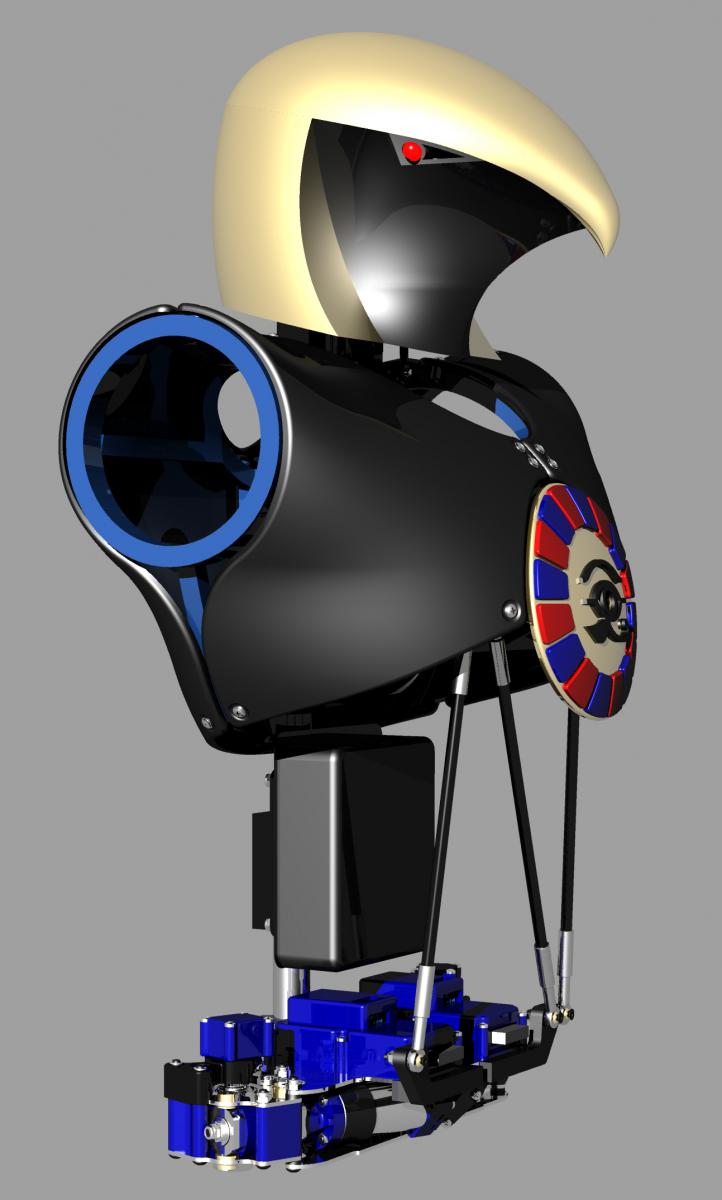
Horus Mk. I
Débuté par Arnaldo, août 27 2018 10:08
26 réponses à ce sujet
#22

Arnaldo
-
- Membres
- 9 messages
Nouveau membre
- Gender:Male
Posté 09 septembre 2018 - 07:11
Bonjour à tous,
Un nouveau post sur mon blog (http://www.avbotics.com) dédié au contrôle des articulations par des PID. J'explique également comment utiliser les capteurs d'efforts pour émuler une articulation sur ressort/amortissseur. Cela peut intéresser les roboticiens qui s'intéressent aux interfaces haptiques (sens du toucher, retour d'effort).
Voici une vidéo qui montre comment cela fonctionne sur la cheville de Horus Mk. I. J'avais utilisé une Arduino Due, qu'on voit sur la vidéo, et ça fonctionnait très bien.



#24
macerobotics
-

- Membres
-

- 164 messages
Membre occasionnel
- Gender:Not Telling
- Location:Bretagne
Posté 10 septembre 2018 - 07:43
Superbe réalisation !
Mace Robotics - Conception & réparation électronique
#25
Arnaldo
-
- Membres
- 9 messages
Nouveau membre
- Gender:Male
Posté 15 janvier 2019 - 09:17
Bonjour à tous,
J'ai bien avancé sur le torse et la tête. Toutes les pièces sont fabriquées et j'ai obtenus les premiers mouvements grâce à une RPi sous Python.
Bientôt des photos et videos... Je m'attaque maintenant aux bras !
#27
Mike118
-

- Administrateur
-
- 10â¯326 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 16 janvier 2019 - 12:11
Jolie 3D ! hâte de voir les photo et vidéo en vrai ! =)
Maintenant je comprends mieux le nom " Horus " =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

