Le seul moyen que j'ai trouvé, passer par au dessus, permet de ne pas du tout marquer la nappe et ce à aucun endroit. Je suis maniaque avec le matos lol
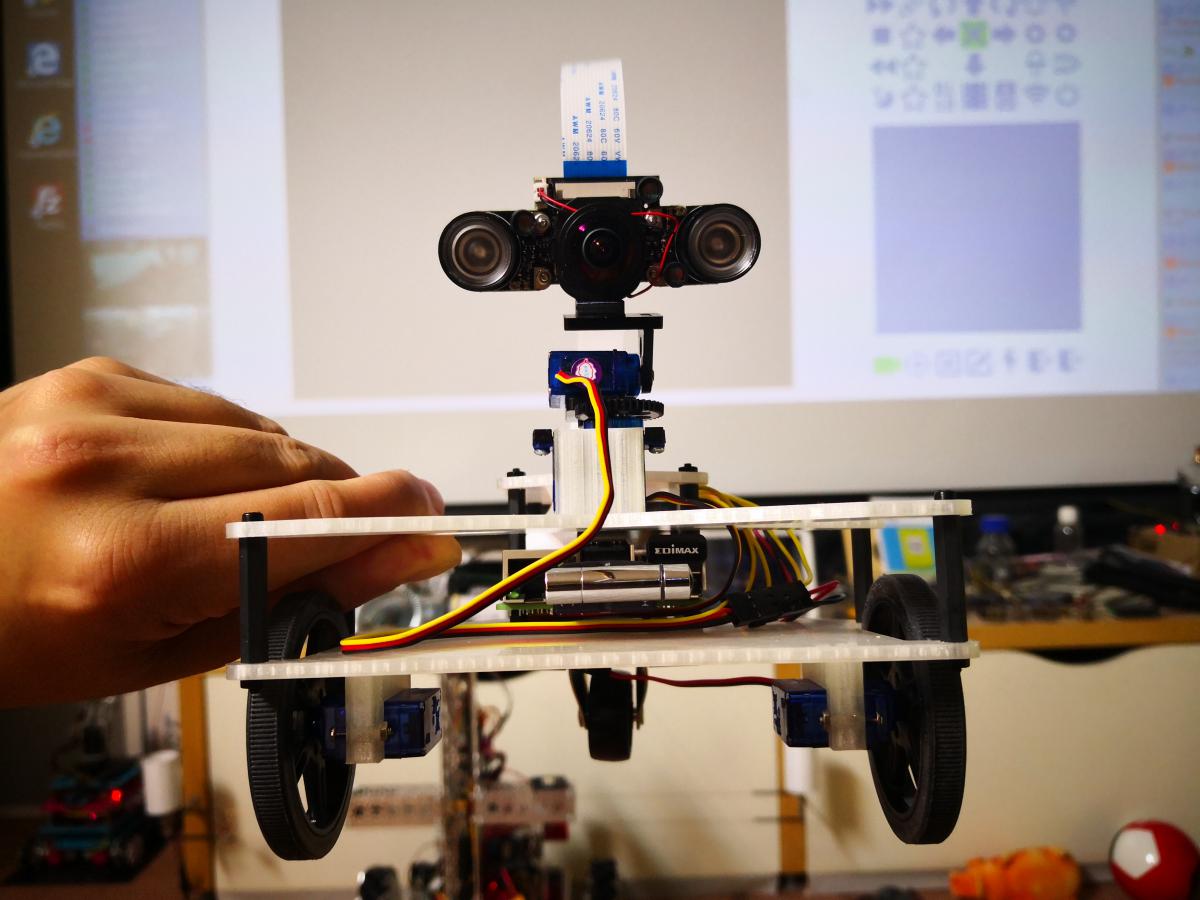
Et j'ai une tête avec un servo + un engrenage qui permet à l'axe X / pan de faire presque le tour complet et aucun soucis.
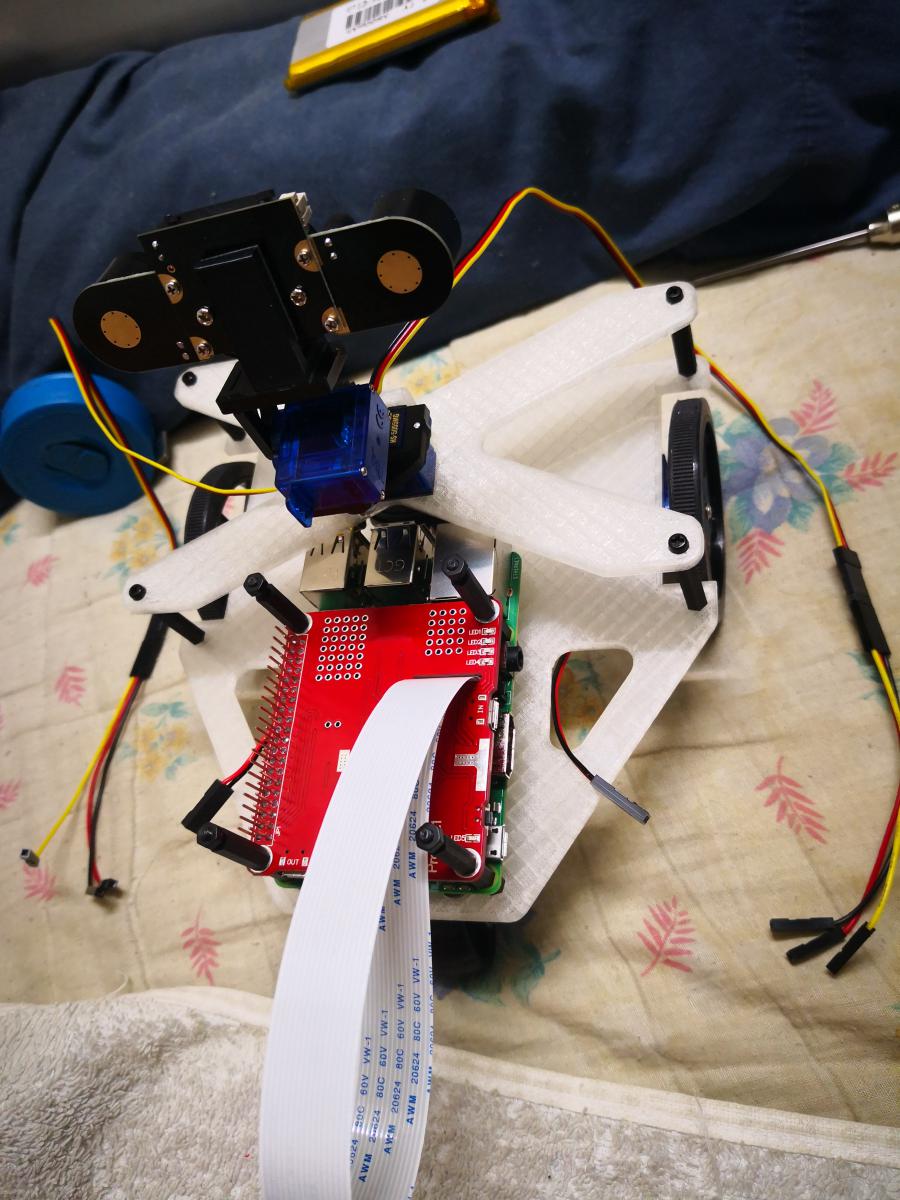
Il devrait y avoir moyen de passer la nappe par dessous mais il faut forcément plier d'une certaine façon et faire des "accordéons" ou des boucles au niveau des articulations.
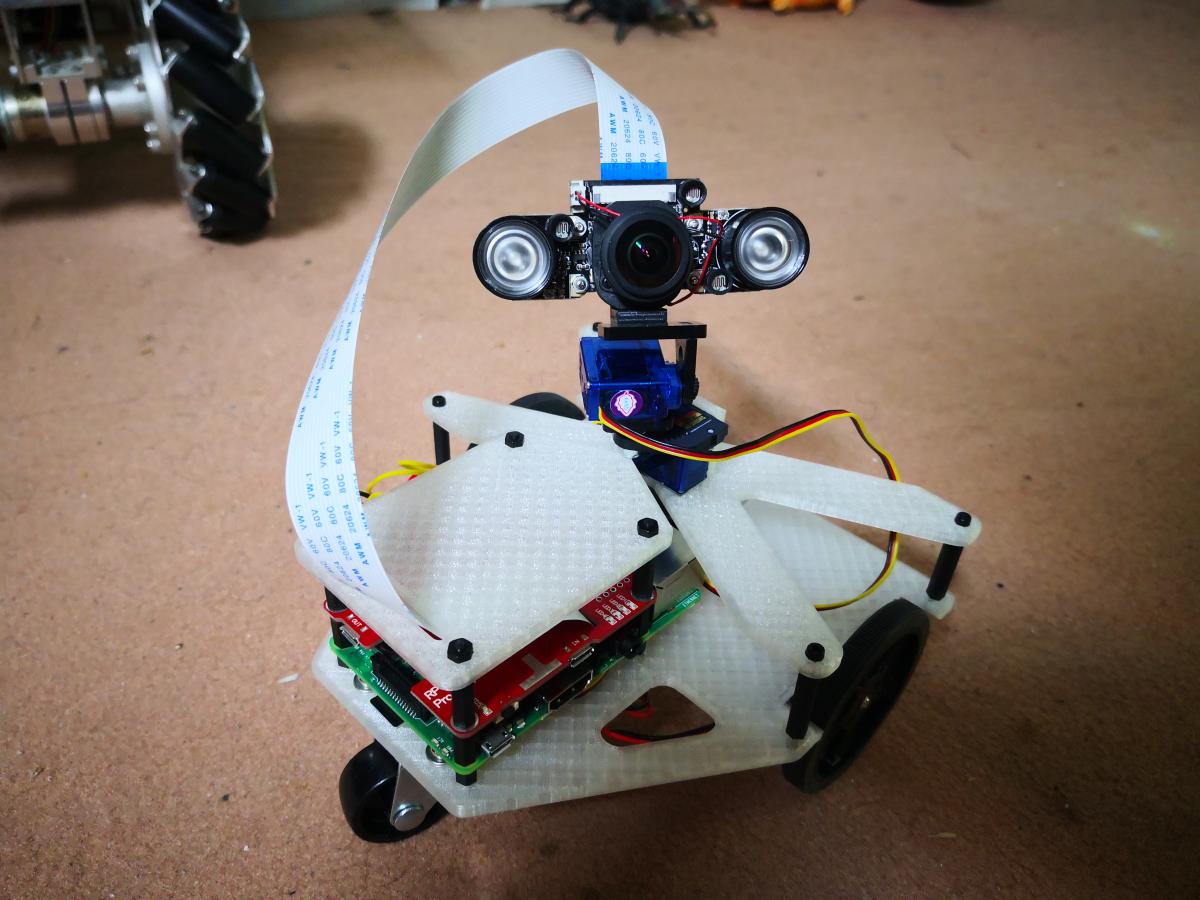
Les seules caméras -PI- utilisables sur des petits robots sont des grands angle de 170 degrés, les caméras officielles sont inutilisables - ça zoom / serre de trop et rend le pilotage désagréable - et il n'existe actuellement un seul modèle qui comporte un filtre IRcut amovible (bientôt sur la boutique du site) et permet d'avoir de bonnes couleurs la journée et une sensibilité potable la nuit avec les 2 fameuses leds de 1 watt qui servent d'illumination infrarouge.
ça permet de très bien voir une pièce de 40m carré sans soucis. Je pense plus. Soit quelques mètres devant le robot, 4 ou 5 mètres je pense...
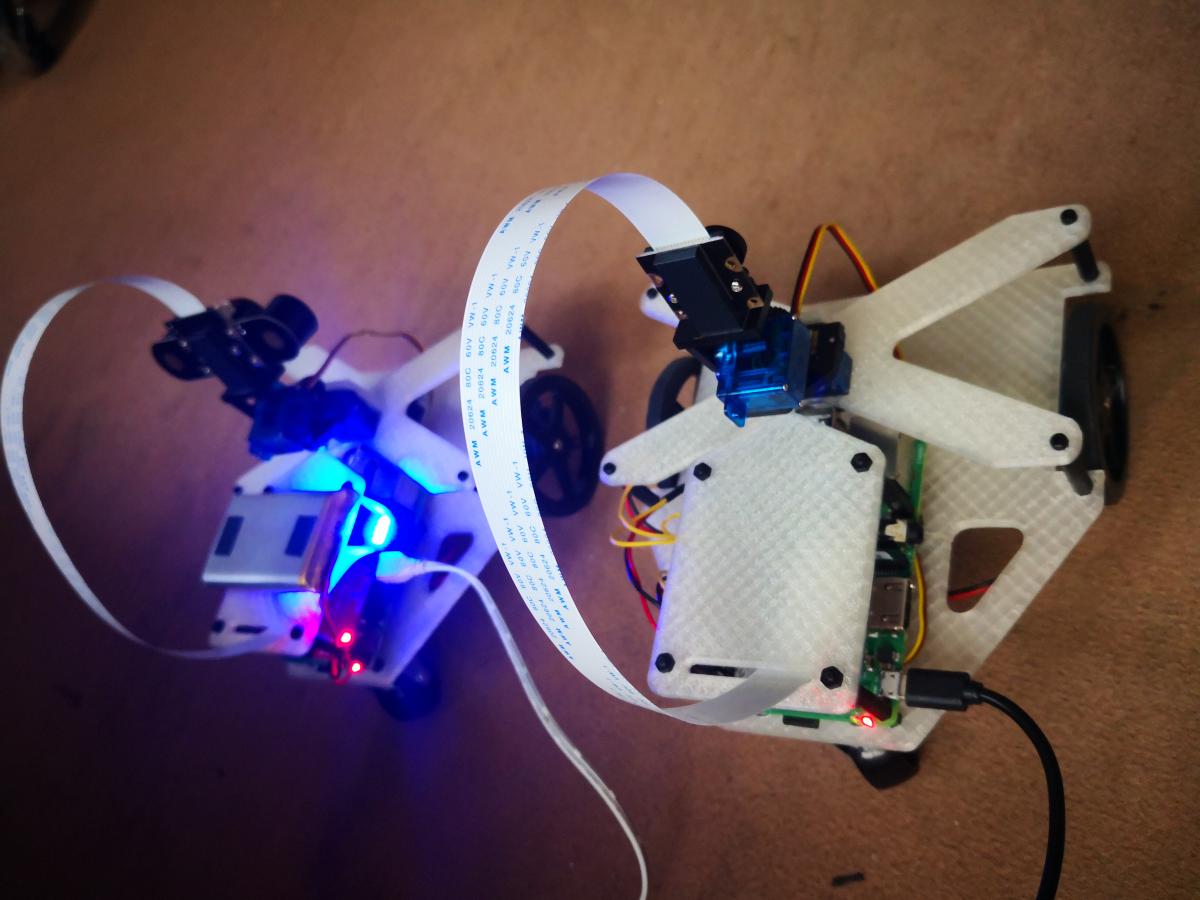
Niveau sensibilité c'est un capteur CMOS 1/4 de pouce avec un gain assez faible (impossibilité de faire apparaître le plancher de bruit à l'image) sans les projecteurs 2 * 1W IR il ne faut pas compter voir quoi que ce soit la nuit.
Il reste à étudier la coupure des leds car elles consomment pas mal et ont tendance a rester allumé longtemps après la bascule en mode journée de la caméra. il faut beaucoup de lumière pour qu'elles se coupent. Je pense qu'il faudra apporter une mod pour injecter un signal de coupure forcé des leds IR.
La sensibilité est très dépendante du temps d'expo de chaque images et le compromis idéal que j'ai trouvé entre la fluidité du H.264 et la sensibilité c'est le 25FPS qui correspond au bon vieux PAL utilisé par d'autres robots plus avancés ayant de vrais caméras ou il commence à être possible de parler "sensibilité"
Des photos sans illumination IR, avec IR, lumière fluo, et la denière photo ni l'un ni l'autre mais avec une caméra CCD couleur 1/4 de pouce + un traitement vidéo maison





 ChassisMinusV1.stl 736,51 Ko
292 téléchargement(s)
ChassisMinusV1.stl 736,51 Ko
292 téléchargement(s)