

Il ne faut pas négliger le règlement histoire de ne pas avoir quelqu'un qui fasse un drone qui dépose 100 dès qui ont des 6 sur toutes les faces 

145 réponses à ce sujet
#101

Laurent42
-

- Membres
- 58 messages
Membre
- Gender:Male
- Location:LV-426
- Interests:Intelligence artificielle, robotique, mathématiques, physique, algorithme
Posté 04 juin 2019 - 01:53
Chaine youtube: https://www.youtube....S5Fpxv0XniGv2FQ


#103
Amhnemus
-

- Membres
-

- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 09 juin 2019 - 07:58
Très sympa bon allez on va s'y remettre et finir tout ce merdier  vivement que je m'entraîne vite fait le 29 au matin .
vivement que je m'entraîne vite fait le 29 au matin .
vivement que je m'entraîne vite fait le 29 au matin .
1ère place Robot Warrior 2019 humanoïdes autonome
#104
pmdd
-

- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 13 juin 2019 - 10:09
En parlant de règlement, j'ai bien compris que le bipède ne doit pas avoir d'arme, ni de système expansif style pantographe, mais y-a-t'il des contraintes sur la longueur de ses bras ?
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#105
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 13 juin 2019 - 10:12
Tiens t'en qu'à fait les carrée de départ était de 50x50 et j'ai vu que désormais c'est un rectangle de 50x40 où se situe le 40 désormais.
1ère place Robot Warrior 2019 humanoïdes autonome
#106
yamovince
-
- Membres
-
- 300 messages
Habitué
Posté 16 juin 2019 - 10:08
Hello,
Bon il n'y a pas de contrainte pour la longueur des bras (je me demande ce que tu as derrière la tête mais bon... espérons que ce ne soit pas trop tordu
Pour les cases effectivement désolé de ne pas te l'avoir souligné mais on a ramené à 50cm par 40cm sinon ca ne rentrait pas dans le coffre ! (40+50 d'espace+40 = 1m30 de long par 1m)
#107
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 16 juin 2019 - 10:13
@Yamo merci pour ta réponse et heureusement que t'a pas une smart le plateau aurait fait 1m de long sur 10 de large ok merci je vais pouvoir m'en faire une maquette et commencer l'entraînement.
ok merci je vais pouvoir m'en faire une maquette et commencer l'entraînement.
1ère place Robot Warrior 2019 humanoïdes autonome
#108
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 17 juin 2019 - 06:31
Hello,
Bon il n'y a pas de contrainte pour la longueur des bras (je me demande ce que tu as derrière la tête mais bon... espérons que ce ne soit pas trop tordu
Pour les cases effectivement désolé de ne pas te l'avoir souligné mais on a ramené à 50cm par 40cm sinon ca ne rentrait pas dans le coffre ! (40+50 d'espace+40 = 1m30 de long par 1m)
Non, non rien de tordu ! juste pour préciser les choses, faire la différence entre une arme et un bras. Rassure-toi David n'a que les dents qui soient longues.... 
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#109
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 26 juin 2019 - 12:27
Voilà l'heure du concours arrive et comme c'est mon premier, je goûte aux affres de la préparation... Je suis un habitué des compétitions sportives, du régime scandinave dissocié de la dernière semaine....mais là c'est nouveau. Premier coup de chaud, samedi matin au moment de démarrer Legothor , la panne sèche, point dur sur un servomoteur qui fonctionnait parfaitement bien auparavant. Petite panique, commande en urgence chez Lego mais dans le doute fabrication d'un adaptateur pour un autre servo moteur. Et pendant que j'y étais conception d'un ensemble complet (moteur + structure) avec changement rapide...
Et ce matin je suis livré par Lego (4 jours d'Angleterre...pas mal).
Hier soir, nouveau coup de chaud, avec cette canicule je bats des records, impossible de télécharger le programme complet avec un message laconique "impossible de compiler"... je n'ai pas compris, et après une heure de manip, arrêt PC, arrêts briques lego, plusieurs fois, c'est passé. Première fois que j'ai le problème...
Sans compter de l'erreur de débutant de faire des modifs de programme du dernier moment...Pour le fun j'ai rajouté un cri de kamikaze à David le bipède lors de son attaque. Je n'ai pas pensé un seul instant que cette modif allait mettre une pagaille dans son comportement. Le son émis à l'intérieur d'une boucle dont la sortie était lié à l'angle du gyroscope a prolongé le temps de rotation d'un moteur, et du coup la sortie de boucle se faisait dans de mauvaises conditions... David était complètement perdu !!!
Bref tout cela est corrigé, mais je ne touche plus aucun des deux participants avant les essais de samedi... 
Vendredi soir, je dévoile Legothor en avant-première ici, sur le forum ROBOT MAKER et les astuces retenues pour le concours... En attendant les vidéos de la journée fatidique !!!
- Amhnemus aime ceci
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#110
yamovince
-
- Membres
-
- 300 messages
Habitué
Posté 26 juin 2019 - 01:08
Oulala oui ça chauffe. Surtout que le jour J je peux déjà tannoncer quil y aura un photographe pour Le Progrès, une vidéaste pro qui fera un petit montage souvenir et peut-être France 3 qui passera ??
Bon préparatifs
Bon préparatifs
#111
Laurent42
-
- Membres
- 58 messages
Membre
- Gender:Male
- Location:LV-426
- Interests:Intelligence artificielle, robotique, mathématiques, physique, algorithme
Posté 26 juin 2019 - 01:13
Je suis curieux de voir si quelqu'un va mettre les dès sur 6
Laurent
Chaine youtube: https://www.youtube....S5Fpxv0XniGv2FQ
#112
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 26 juin 2019 - 02:25
Je suis curieux de voir si quelqu'un va mettre les dès sur 6
Laurent
C'est prévu à mon programme... 
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#113
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 26 juin 2019 - 08:34
@pmdd je te rejoins sur plusieurs point :
1 - Première compétion de robotique et j'essaie de ne rien oublier
2 - Après la galère de mon Arduino nano avec le port USB arraché, j'ai essayer de le recoller mais rien ne s'allume en USB donc pas de téléversement possible juste l'utilisation du programme existant dessus est possible, donc on va le garder en trophée mdr. Donc préparation d'un nouveau Nano (heureusement j'en ai plusieurs de rechange) et la le drame : programme erratique, cafouillage sur une servo, je savais cette servo defectueuse donc on ouvre et oui servo plus aligné je trouvais le 90° avec une commande à 119° donc changement rapide de la servo par une autre que j'avais en stock (encore heureusement), et là mieux au niveau du calibrage mais toujours un comportement erratique et non prévu, un tour dans le programme et là je trouve de suite (Dieu me parle des fois à 2grammes souvent  ) donc oui faut pas mettre n'importe quoi dans une boucle while on y sort très vite
) donc oui faut pas mettre n'importe quoi dans une boucle while on y sort très vite  . Donc pour le moment ça va mieux on va dire on continue les réglages ce soir à la fraîche, oui la chaleur peux être fatale.
. Donc pour le moment ça va mieux on va dire on continue les réglages ce soir à la fraîche, oui la chaleur peux être fatale.
En tout pmdd je suis heureux que tu es réussi à te sortir de cette galère rien de pire que la panne le jour J surtout après tant de boulot. Et dommage pour le cri du kamikaze ça aurait été trop fun mais bon parfois vaut mieux assurer ce qu'on maîtrise plutôt que de partir sur des choses qui ne le feront pas gagné même pire perdre !!!
Pour ma part j'ai écris au moins 10 version de programme et je n'en retenu que 2 et pour le moment 1 seul est presque parfait donc on va le garder c'est sur, on va bosser sur le 2ème si vraiment il y a le temps.
J'ai hâte que tu les dévoile vendredi soir et surtout hâte de les voir samedi tes 2 monstres .
@yamovince bien les journalistes et surtout le montage souvenir bon plus qu'à passer un coup de polish alors !!!!
1ère place Robot Warrior 2019 humanoïdes autonome
#114
Laurent42
-
- Membres
- 58 messages
Membre
- Gender:Male
- Location:LV-426
- Interests:Intelligence artificielle, robotique, mathématiques, physique, algorithme
Posté 27 juin 2019 - 11:40
Dommage que je sois si loin, je serais bien passé pour voir tout ça !
Chaine youtube: https://www.youtube....S5Fpxv0XniGv2FQ


#116
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 27 juin 2019 - 02:15
La hype est élevée !
J'attends aussi les photos et vidéos !
J'attends aussi les photos et vidéos !
#117
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 27 juin 2019 - 09:28
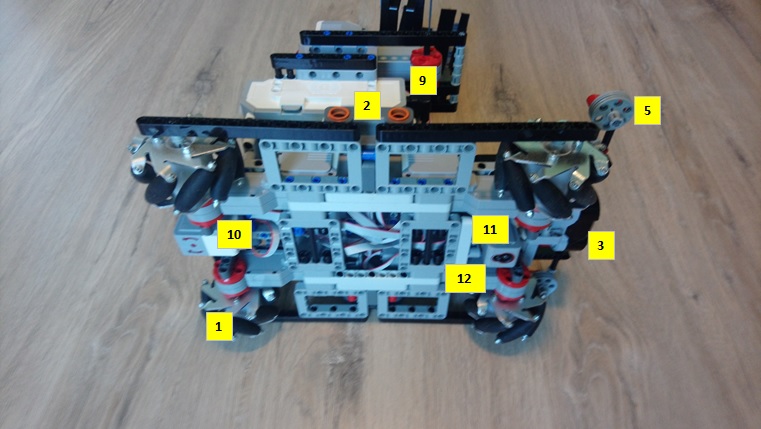
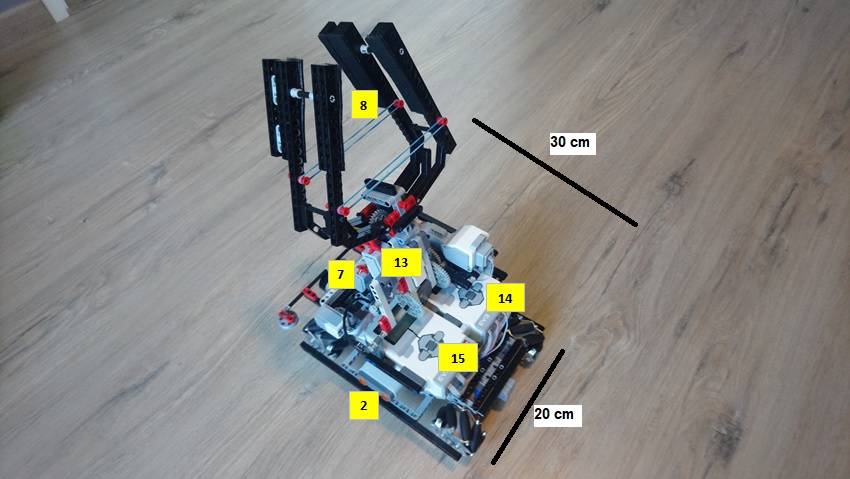
A la veille de la compétition voilà comme promis une présentation plus complète de Legothor :
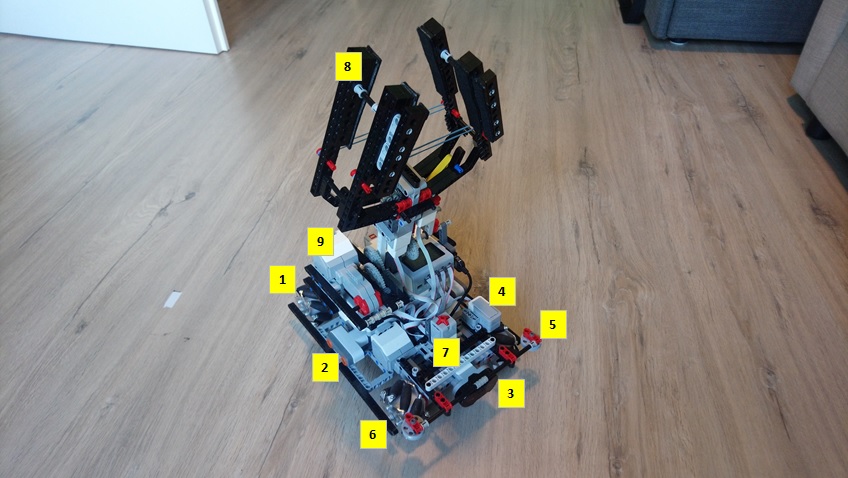
D’une longueur de 30 cm sur une largeur de 20 cm (juste le gabarit maximum autorisé), il embarque 2 briques lego Ev3 (14 et 15) reliées en « daisy chain », l’un étant maître et l’autre esclave, 8 capteurs et 6 moteurs. Il pèse 2kg pile et mesure 45 cm de haut quand les pinces sont déployées.
Un des points forts sont les roues Mecanum (1) et je remercie ici Robot Maker et Mike 118 de m’avoir fait découvrir et fournit ces roues que je trouve géniales. Elles font gagner beaucoup de temps dans les changements de direction. Chaque roue mecanum est pilotée par un moteur individuel (11).
Le principe général que j’utilise est de mesurer la distance entre les rebords latéraux en utilisant 2 détecteurs à ultrasons (2). Mon astuce est aussi dans certains déplacements de frotter ces rebords pour avoir un maximum de précision (si tenté que les rebords soient fabriqués de façon précise). J’utilise pour cela des roulettes latérales (5) et des rails dont j’ai limé l’extrémité (6) pour faire un chanfrein pour éviter toute accroche en frottant.
Le deuxième principe est d’utiliser un gyroscope (10) pour garder la direction et m’orienter dans les différentes parties du circuit. Ce gyroscope est aussi utilisé lors du franchissement des bosses pour éviter que le robot ne parte n’importe où, il est donc remis en permanence dans la bonne direction.
J’utilise un deuxième gyroscope (4) pour identifier le passage sur la bascule et gérer son franchissement.
A l’avant est situé un détecteur infra-rouge (3), pour gérer la distance avec les obstacles, le passage de la porte automatique et surtout la distance avec les dés en mousse que les ultrasons ne « voient » pas à cause de la matière)
Le robot est programmé pour faire la totalité du challenge, donc un tour complet et donc deux fois le passage de la bascule. Le franchissement de la porte prend en compte le cycle de fermeture et non pas les led au sol, même si j’ai programmé cette variante en utilisant le détecteur lumineux placé sous le robot (12). Mais je ne la trouve pas fiable.
.
Une fois la porte franchie le robot se positionne devant le premier dé en utilisant comme référence les bords ce qui est le plus précis.
Il saisit le dé avec la pince géré en rotation par le moteur (9) et en ouverture par le moteur (13). Le dé est saisi devant le robot et posé derrière le robot avec un mouvement des pinces de 180 °, ce qui positionne le 6 en face visible. Le robot reconduit le principe pour les deux autres dés et fonce vers la ligne d’arrivée.
L’astuce pour tenir le dé de façon ferme mais de pouvoir le libérer facilement est d’avoir revêtu les pinces de feutrines, ce qui a un effet scratch sur les dés en mousse quand ils sont serrés (ils ne peuvent pas tourner dans la pince). Le positionnement de la pince est assuré par deux détecteurs mécaniques (rotation et ouverture).
Tout cela évidemment si tout va bien. Les impondérables du circuit, principalement une mauvaise géométrie du circuit et des rebords peut tout faire foirer. Il faut compter aussi avec le point faible du retourner de dé, où le couple nécessaire est important (j’ai déjà eu une panne) et la dépose du dé fiable à 95% (le dé bascule dans de très rares cas). La fiabilité du gyroscope peut aussi être problématique même si au niveau du programme j'ai tout fait pour éviter cela.
Le fait de vouloir faire la totalité du challenge est aussi à risque et pas forcément stratégique. Le tour complet ne rapporte qu'un point de plus mais une bonne dose de difficultés supplémentaires ! Mais c'est pour la beauté du geste !
.Et il faut réussir dans les 5mn maximales fixées !!!
Bref beaucoup de travail et de plaisir avec la découverte des robots roulants, chose que je trouvais trop basique mais que je trouve finalement très sympa. J’imagine que mes futurs projets seront dans ce domaine là (Parcours labyrinthe, suivi de ligne à grande vitesse…)
Allez une dernière fois le teaser pour m’auto-encourager ! Tout ne se passera pas comme prévu mais ça va être sympa…
- Mike118, R1D1, macerobotics et 3 autres aiment ceci
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#118
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 27 juin 2019 - 09:44
J'adore vraiment trop trop trop, franchement tu t'es déchiré a fond la (a part pour ton post qui a des soucis de copie ).
Du très beau boulot, tu as pensé a tout les cas de figures et j'espère qu'il terminera le parcours.
Les robots roulants sont trop simples ? Tu as pu voir qu'avec ce genre de parcours ce n'était pas simple en tout cas si ça t'a motivé pour en faire d'autres.
Et j'aime beaucoup "si la géométrie du parcours est bien faite et les rebords aussi alors ça sera bon" mdr tu incrimine déjà le parcours mdr, je vais dire la même pour les bipède si le blanc est vraiment blanc alors ça sera bon mdr.
Du très bon boulot, ce soir j'avais la flemme de bosser encore un peu mais je me repose pour régler mes derniers trucs demain après midi avant une nuit de route et samedi matin je terminerai tour ça.
Bravo !!!!
Du très beau boulot, tu as pensé a tout les cas de figures et j'espère qu'il terminera le parcours.
Les robots roulants sont trop simples ? Tu as pu voir qu'avec ce genre de parcours ce n'était pas simple en tout cas si ça t'a motivé pour en faire d'autres.
Et j'aime beaucoup "si la géométrie du parcours est bien faite et les rebords aussi alors ça sera bon" mdr tu incrimine déjà le parcours mdr, je vais dire la même pour les bipède si le blanc est vraiment blanc alors ça sera bon mdr.
Du très bon boulot, ce soir j'avais la flemme de bosser encore un peu mais je me repose pour régler mes derniers trucs demain après midi avant une nuit de route et samedi matin je terminerai tour ça.
Bravo !!!!
- pmdd aime ceci
1ère place Robot Warrior 2019 humanoïdes autonome
#119
yamovince
-
- Membres
-
- 300 messages
Habitué
Posté 27 juin 2019 - 10:05
Excellent, c'est un sacré robot de compète.
J'ai corrigé pas mal de "problèmes avec les bords". On utilisera aussi du gros scotch blanc pour relier les bords des différents éléments une fois assemblés.
Bref tu n'auras plus trop d'excuse









3 utilisateur(s) li(sen)t ce sujet
0 members, 3 guests, 0 anonymous users

