Si oui, es tu satisfait? Hâte de voir une vidéo de ton robot avec les 2 brick lego et les roues mécanum ! =)
Moi aussi j'ai hâte mais je ne les ai pas encore reçues !!! J'ai refait à zéro tout le robot pour intégrer 4 servos pour 4 roues motrices et j'attends pour pouvoir placer les capteurs en fonction de l'encombrement des roues. Effectivement ça fait une belle bête, en tout cas pour moi, 2 bricks, 8 capteurs et 7 moteurs !
En effet mea culpa. Puisque la commande a été envoyée lundi je supposais que tu l'avais déjà reçu...
Après vérification il semblerait que la poste a un peu trainé mais cela ne devrait plus tarder.
Je viens de t'envoyer le numéro de suivi par mail.
En effet mea culpa. Puisque la commande a été envoyée lundi je supposais que tu l'avais déjà reçu...
Après vérification il semblerait que la poste a un peu trainé mais cela ne devrait plus tarder.
Je viens de t'envoyer le numéro de suivi par mail.
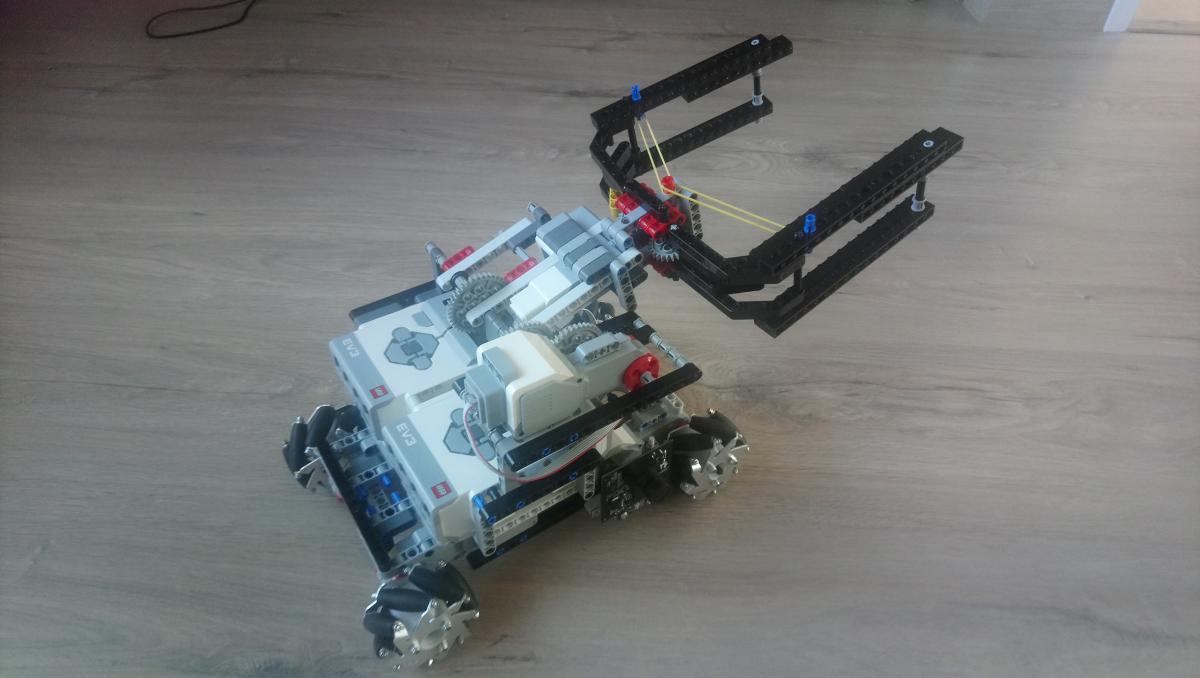
Yes, je viens de les recevoir, aussitôt reçues je les ai montées mais pas essayées...elles ont de la gueule, costaud...à suivre !
Il manque tous les capteurs, mais juste pour avoir un aperçu:
Peux-tu nous montrer le couplage des Omniwheels avec la mécanique Lego ?
J'ai fourni des moyeux compatible lego avec le set spécialement pour pmdd.
J'avais un seul jeu de couplage compatible lego pour les roues mecanum en stock pour test, pris spécialement en pensant à toi et pmdd...
Si il en est pleinement satisfait je pourrais en avoir un jeu pour toi plus tard si ça t'intéresse =).
Super !! Je crois que les 2 roues arrières doivent être interverties.
J'ai pourtant respecté les roues droites et gauches notées sur l'emballage et j'ai programmé les différents mouvements (rectilignes, rotations, latéraux) et tout fonctionne bien...je les ai mal montées ?
J'ai fourni des moyeux compatible lego avec le set spécialement pour pmdd.
J'avais un seul jeu de couplage compatible lego pour les roues mecanum en stock pour test, pris spécialement en pensant à toi et pmdd...
Si il en est pleinement satisfait je pourrais en avoir un jeu pour toi plus tard si ça t'intéresse =).
J'ai mis les roues comme indiquées dans le lien mais du coup il faut que je reprogramme mes mouvements. A vrai dire je ne comprends pas trop car cela fonctionne parfaitement bien comme je les avais mises.
Mécaniquement, j'ai toujours trouvé cela intéressant, mais pas pour faire rouler des robots. Sauf pour des parquets bien cirés.
Désolé.
Aucun problème =)
J'avais qu'un exemplaire de moyeux lego et il n'y a qu'une personne qui le voulait c'est parfait ! =)
Ma remarque c'était juste pour qu'il n'y ait pas de "jaloux" =)
J'ai pourtant respecté les roues droites et gauches notées sur l'emballage et j'ai programmé les différents mouvements (rectilignes, rotations, latéraux) et tout fonctionne bien...je les ai mal montées ?
hum ... Intéressant ...
En fait le "droite gauche " il est valable ... Mais il n'y a pas de notation " avant arrière " ...
Quand tu retourne ton robot de 180° le sens des roues est censé être le même ...
Je suis curieux de voir la vidéo des déplacements avec les roues montées comme tu l'avais fait...
Le déplacement latéral me semblait quelque peu compromis avec ton premeir montage ...
Mécaniquement, j'ai toujours trouvé cela intéressant, mais pas pour faire rouler des robots. Sauf pour des parquets bien cirés.
Désolé.
C'est mon premier vrai robot roulant et je ne suis donc pas un spécialiste. C'est la 3ème version de ce robot. C'est clair que les chenilles permettent le franchissement d'obstacles, mais au détriment de la vitesse. Dans le challenge que je poursuis cela est mineur, les obstacles sont "doux". En revanche je découvre ces roues mécanum et il n'y pas photo sur les temps comparés de positionnement et de manoeuvre.
Et comme l'a dit Mike 118 elles ont le gros avantage de ne pas glisser en dévers par rapport à des roues omnidirectionnelles classiques. J'ai fait l'essai il n'y a pas photo.
Je suis vraiment satisfait de mes premiers essais, à voir le franchissement des obstacles et le positionnement des roues qui me semble un peu confus.
Aucun problème =)
J'avais qu'un exemplaire de moyeux lego et il n'y a qu'une personne qui le voulait c'est parfait ! =)
Ma remarque c'était juste pour qu'il n'y ait pas de "jaloux" =)
hum ... Intéressant ...
En fait le "droite gauche " il est valable ... Mais il n'y a pas de notation " avant arrière " ...
Quand tu retourne ton robot de 180° le sens des roues est censé être le même ...
Je suis curieux de voir la vidéo des déplacements avec les roues montées comme tu l'avais fait...
Le déplacement latéral me semblait quelque peu compromis avec ton premeir montage ...
je fais une vidéo demain comme je les ai montées initialement, juste pour te montrer, après je suis prêt à suivre la règle de l'art. Mais je trouvais déjà ça top, sur 6 mouvements: rectiligne avant et arrière, latéral gauche et droite, et rotation horaire et anti-horaire.
C'est clair que les chenilles permettent le franchissement d'obstacles, mais au détriment de la vitesse.
Je ne pense pas qu'il faille comparer ces roues avec des chenilles. L'alternative, c'était des roues avec pneus qui eux permettent le franchissement d'obstacles assez importants, et de monter des pentes.
Je ne pense pas qu'il faille comparer ces roues avec des chenilles.
L'alternative, c'était des roues avec pneus qui eux permettent le franchissement d'obstacles assez importants, et de monter des pentes.
Dans le cas de mon projet les roues à pneus n'ont aucun intérêt. Soit le parcours était très tourmenté et les chenilles semblaient être la meilleure solution, soit il ne l'était pas et la roue mecanum permet des positionnements très rapides , ce que la roue à pneu ne permet pas. En tout cas je découvre ces roues et je suis vraiment satisfait. J'ai vu des videos de concours où ces robots avaient de meilleures performances en terme de réactivité sur des positionnements ou des déplacements courts, c'est ce que je recherche. Quant au parcours, le relief semble être doux et les roues mecanum vont faire l'affaire, à vérifier.
Je ne suis pas fan au départ des robots roulants mais je découvre des choses intéressantes et merci à Mike 118 de m'avoir orienté sur ces roues mecanum que je recommande.
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 01 mars 2019 - 09:31
Je ne pense pas qu'il faille comparer ces roues avec des chenilles.
L'alternative, c'était des roues avec pneus qui eux permettent le franchissement d'obstacles assez importants, et de monter des pentes.
Les roues classique, les chenilles, les roues mécanum, les pattes et les roues omniwheel sont des moyens de locomotion.
On peut donc les comparer en tant que tel.
Chacun des moyens de locomotion a ses avantages et inconvénients.
On les notera en générél sur les critères suivant :
Vitesse max, capacité de franchissement, coût, complexité de mise en oeuvre, manoeuvrabilitité, encombrement, environnement d'usage, efficacité ....
Sachant que ces paramètres influent les un sur les autres au sein d'un même choix de locomation ...
Les roues mécanum peuvent franchir des pentes. Et si on bute sur un obstacle donné, de la même façon qu'avec des roues classiques, pour franchir des obstacles plus important avec des roues mecanum il suffit d'avoir des roues plus grosses ... ( Mais prix et encombrement augmenté)
Par contre il est claire que je ne recommande pas l'usage de roues mecanum en forêt ou autre environnement extérieur. Mais ces roues sont adaptées pour des configurations indoor.
Je pense que la compétition robomaster où le sol est composé de pente et d'obstacles en tout genre et rapidement rempli de projectile est un bon exemple de ce que des roues mecanum peuvent faire.
Je ne vais pas chercher à rentrer plus dans le débat avec Oracid, car pmdd a déjà dit l'essentiel.
Dans le cas de mon projet les roues à pneus n'ont aucun intérêt. Soit le parcours était très tourmenté et les chenilles semblaient être la meilleure solution, soit il ne l'était pas et la roue mecanum permet des positionnements très rapides , ce que la roue à pneu ne permet pas. En tout cas je découvre ces roues et je suis vraiment satisfait. J'ai vu des videos de concours où ces robots avaient de meilleures performances en terme de réactivité sur des positionnements ou des déplacements courts, c'est ce que je recherche. Quant au parcours, le relief semble être doux et les roues mecanum vont faire l'affaire, à vérifier.
Je ne suis pas fan au départ des robots roulants mais je découvre des choses intéressantes et merci à Mike 118 de m'avoir orienté sur ces roues mecanum que je recommande.
Je suis content que la proposition te convienne parfaitement pmdd. Si je l'ai faite c'est uniquement par ce que j''étais convaincu qu'au vu de l'application visée cela allait te convenir et c'est visiblement bien le cas du moins pour le moment.
Il semblerait donc que les roues Mecanum puissent gravir des pentes. Sans doute que les éléments des roues sont en caoutchouc relativement mou. C'est bon à savoir. Merci pour l'info. Pour le franchissement d'obstacles, et bien cela dépend bien sûr du diamètre de la roue mais également de l'accroche des caoutchoucs.
Il semblerait donc que les roues Mecanum puissent gravir des pentes. Sans doute que les éléments des roues sont en caoutchouc relativement mou.
C'est bon à savoir. Merci pour l'info.
Pour le franchissement d'obstacles, et bien cela dépend bien sûr du diamètre de la roue mais également de l'accroche des caoutchoucs.
Oui elles gravissent les pentes, je te donnerai la pente max sur un plan lisse et un plan avec feutrine. J'ai essayé , elles ne sont pas sensibles au devers, contrairement aux roues omnidirectionnelles, qui glissent sur le côté. En revanche le point faible semble l'attaque d'un obstacle perpendiculaire. Je fais un compte rendu de mes essais en fin de WE
Il semblerait donc que les roues Mecanum puissent gravir des pentes. Sans doute que les éléments des roues sont en caoutchouc relativement mou.
C'est bon à savoir. Merci pour l'info.
Pour le franchissement d'obstacles, et bien cela dépend bien sûr du diamètre de la roue mais également de l'accroche des caoutchoucs.
J'ai fait l'essai sur une planche d'agglo mélaminé, le robot (2 kg) grimpe au maximum une pente de 35% (mais c'est vraiment la limite)








 mais gaf quand le robot va se retrouver sur 3 roues sur le parcours. Tas pu essayer dans ce contexte ?
mais gaf quand le robot va se retrouver sur 3 roues sur le parcours. Tas pu essayer dans ce contexte ?













