
Ne sachant pas où poster, car il ne s'agit pas un robot à proprement parlé, je tente ma chance ici.
Ceci serait mon premier projet.
Je cherche à créer un bot qui serait caché derrière une plaque de métal pour être protégé et qui déplacerait une cible dans le but de la montrer/cacher.
Plusieurs niveaux d'améliorations me viennent à l'esprit.
1) permettre à l'utilisateur de choisir le temps d'apparition et de disparition de la cible. Y compris aléatoire.
2) faire un réseau de bots qui fonctionnerait simultanément. Ce qui permettrait à l'utilisateur de pouvoir choisir combien de cibles apparaissent en même temps.
3) déceler quand une cible est touchée. Émettre un signal sonore et ou visuel. Déceler quand une cible a été manqué.
J'ai d'autres idées mais déjà si j'arrive à faire ça je serais fier de moi. Je me dis que pour vous qui créez carrément des robots ce doit être facile 😊
En recherchant sur Google je n'ai trouvé qu'un produit qui ferait des choses similaires à ce que je veux. Le targabot.
https://m.youtube.co...h?v=H4eEozinPAA
Je pense que ça pourrait être un bon début pour mon projet. Ne connaissant pas le matériel qu'il existe en robotique, avec mes mots il me faudrait :
- un châssis
- un moteur qui puisse faire tourner le châssis autour d'un axe
- un récepteur de fréquence
- une carte programmable pour automatiser les mouvements ?
Pour le mouvement de la barre qui tient la cible, comment faire le mouvement ?
Je pensais à emprisonner la barre sous 4 petites poulies qui, grâce à leurs moteurs respectifs, déplaceraient cette barre.
Pour l'instant, niveau hardware cela vous semble t il cohérent ? Comment le feriez vous ? Quels matériels vous paraissent le plus adaptés ?
Merci à ceux qui participeront à mon projet 😉

17 réponses à ce sujet
#2

Amhnemus
-

- Membres
-

- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 22 juin 2019 - 08:58
Très bon petit projet pour commencer et se familiariser avec ce qui existe donc une carte programmable : Arduino uno, des servomoteur avec un couple adapté (poids/effet de levier) pour bouger tes cibles un châssis pour cacher tes cibles et voilà pour le hardware. Pour tout les choix temps d'apparition et nombre de cible choisi un petit écran ou juste des led de couleur avec un bouton pour le temps et un autre bouton pour le nombre de cible ou voir même juste deux potentiomètre pour le choix c'est même mieux je trouve et du code sur L'arduino pour régler tout ça.
Après pour déceler le tir réussi ou non peut être des cibles qui bascule avec un capteur derrière qui viendrai le toucher et tir non réussi pas trop d'idée, des capteur de présence ???
Donc non rien est impossible et du moment que ton projet te plaît c'est le plus important.
Je te conseillerais de te rapprocher du monde Arduino grâce a des tutos et un peu d'achat Mike118 te donnera surement les liens de la boutique.
Après pour déceler le tir réussi ou non peut être des cibles qui bascule avec un capteur derrière qui viendrai le toucher et tir non réussi pas trop d'idée, des capteur de présence ???
Donc non rien est impossible et du moment que ton projet te plaît c'est le plus important.
Je te conseillerais de te rapprocher du monde Arduino grâce a des tutos et un peu d'achat Mike118 te donnera surement les liens de la boutique.
- MupaY aime ceci
1ère place Robot Warrior 2019 humanoïdes autonome
#3
thermo_nono
-

- Membres
-
- 825 messages
Membre passionné
Posté 22 juin 2019 - 11:52
Pour ce qui est de l'entrainement linéaire, voici un document qui donne une idée de toutes les méthodes envisageables..
Le document est fort détaillé, mais le principal est que tu puisses choisir la technique d'entrainement et de guidage qui te conviendra le mieux.
https://www.michaud-...lgam1.pdf<br>
perso j'aurai retenu l'entrainement par vis sans fin ou par courroie, mais je me laisse influencer par les axes de mon imprimante 3D. ^^
très bon projet.. j'avais pensé à faire un jeu de tir au canard quand j'ai retrouvé ma carabine à plombs au grenier et puis je ne l'ai jamais fait... ^^
- MupaY aime ceci
#4
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 22 juin 2019 - 12:02
Salut Amhnemus,
Merci pour ta réponse et ta réactivité 😊 ça me permet de savoir par quoi commencer.
- Arduino :
Effectivement, j'ai reçu quelques réponses à mon post de présentation et on me conseille Arduino pour débuter aussi la bas. Je pense que c'est une bonne info qui me permet de savoir un peu plus comment réaliser le projet.
Alors j'ai dévoré le tuto bien fait sur ce site, ça m'a l'air facile d'accès tout en permettant de faire des choses complexes. Après m'être renseigné, il existe aussi raspberry. Mon projet me demandant que peu de puissance de calcul, mais pas mal d'entrés/sorties. Ton choix : Arduino me paraît le plus adapté.
Pourquoi as-tu choisi le modèle Uno particulièrement ?
- Servomoteurs:
Je pensais monter la barre sur un servo pour m'en servir comme axe de rotation. Mais c'est ton petit en fait. Ça me paraît fragile! N'en ayant jamais eu entre les mains, il m'est difficile d'estimer leurs résistances.
Pour la v1 du projet je me concentre sur une cible qui se déplacerait uniquement latéralement pour se cacher derrière un mur.
Il faut que le servo puisse maintenir en statique puis faire bouger la cible. Penses tu qu'il puisse porter 2 autres tasseaux verticaux (pour la structure de la cible) + une feuille carton qui sera la cible, le tout fixé sur l'extrémité du bras du bot qui sera horizontal ?
- optimisation :
Pour mettre en interaction plusieurs cibles (plus tard), pour que ça me revienne moins cher, je me disais que je devrais peut-être faire ce premier bot avec sa carte programmable et m'en servir de bot mère. Les autres cibles, éloigné dans l'espace, je les relie par câble à ce robot mère qui les commanderait tous. (en m'assurant bien entendu que le bot mère et son armée ne décident pas de conquérir le monde). Je pensais au début, que le bot mère enverrait un signal via une fréquence aux botslaves pour les déclencher mais ça me demande pleins de cartes...
Mes questions : est-ce la meilleure optimisation budgétaire ? Depuis le bot mère, avec l'atténuation des fils, de combien de mètre pourrais je espacer mes botslaves pour qu'ils recoivent assez d'énergie pour fonctionner ?
- détecteur de tir :
Je pensais intégrer un micro. Il détecterait quand un coup de feu est tiré. Pour savoir si il a touché ou pas la cible, coller à la cible un capteur de mouvement. Le problème du capteur c'est qu'il ne faudrait pas qu'il s'affole au moindre coup de vent, il ne faudrait pas que je lui tire dessus lol
La cible à bascule m'intéresserait bien. Nous utilisons également des plates dans la pratique de mon sport. On les touches et elles basculent. Sorte de cercle en fonte. Par contre au vu du poids... Le servo ne va pas faire long feu lol
- sélecteur de mode :
Les potentiomètres me paraissent une bonne idée, je pense partir la dessus.
Hey thermo_nono,
Merci pour ta contribution. Ça va me permettre d'éclaircir cette partie du projet. Super doc que tu m'as partagé. Je vais potasser ça.
Merci pour ta réponse et ta réactivité 😊 ça me permet de savoir par quoi commencer.
- Arduino :
Effectivement, j'ai reçu quelques réponses à mon post de présentation et on me conseille Arduino pour débuter aussi la bas. Je pense que c'est une bonne info qui me permet de savoir un peu plus comment réaliser le projet.
Alors j'ai dévoré le tuto bien fait sur ce site, ça m'a l'air facile d'accès tout en permettant de faire des choses complexes. Après m'être renseigné, il existe aussi raspberry. Mon projet me demandant que peu de puissance de calcul, mais pas mal d'entrés/sorties. Ton choix : Arduino me paraît le plus adapté.
Pourquoi as-tu choisi le modèle Uno particulièrement ?
- Servomoteurs:
Je pensais monter la barre sur un servo pour m'en servir comme axe de rotation. Mais c'est ton petit en fait. Ça me paraît fragile! N'en ayant jamais eu entre les mains, il m'est difficile d'estimer leurs résistances.
Pour la v1 du projet je me concentre sur une cible qui se déplacerait uniquement latéralement pour se cacher derrière un mur.
Il faut que le servo puisse maintenir en statique puis faire bouger la cible. Penses tu qu'il puisse porter 2 autres tasseaux verticaux (pour la structure de la cible) + une feuille carton qui sera la cible, le tout fixé sur l'extrémité du bras du bot qui sera horizontal ?
- optimisation :
Pour mettre en interaction plusieurs cibles (plus tard), pour que ça me revienne moins cher, je me disais que je devrais peut-être faire ce premier bot avec sa carte programmable et m'en servir de bot mère. Les autres cibles, éloigné dans l'espace, je les relie par câble à ce robot mère qui les commanderait tous. (en m'assurant bien entendu que le bot mère et son armée ne décident pas de conquérir le monde). Je pensais au début, que le bot mère enverrait un signal via une fréquence aux botslaves pour les déclencher mais ça me demande pleins de cartes...
Mes questions : est-ce la meilleure optimisation budgétaire ? Depuis le bot mère, avec l'atténuation des fils, de combien de mètre pourrais je espacer mes botslaves pour qu'ils recoivent assez d'énergie pour fonctionner ?
- détecteur de tir :
Je pensais intégrer un micro. Il détecterait quand un coup de feu est tiré. Pour savoir si il a touché ou pas la cible, coller à la cible un capteur de mouvement. Le problème du capteur c'est qu'il ne faudrait pas qu'il s'affole au moindre coup de vent, il ne faudrait pas que je lui tire dessus lol
La cible à bascule m'intéresserait bien. Nous utilisons également des plates dans la pratique de mon sport. On les touches et elles basculent. Sorte de cercle en fonte. Par contre au vu du poids... Le servo ne va pas faire long feu lol
- sélecteur de mode :
Les potentiomètres me paraissent une bonne idée, je pense partir la dessus.
Hey thermo_nono,
Merci pour ta contribution. Ça va me permettre d'éclaircir cette partie du projet. Super doc que tu m'as partagé. Je vais potasser ça.
#5
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 22 juin 2019 - 01:05
Oui des tutos pour Arduino il en existe beaucoup en français et aussi sur youtube et aussi pas mal de site qui rentre plus en profondeur sur certains sujet. Google est on amis !! Mais ça tu dois déjà le savoir.
Pourquoi Arduino parce qu'il a un langage proche du langage C, malgré qu'il a un langage spécifique ce langage te permet d'utiliser par la suite toute sorte de carte qui sont programmable avec IDE Arduino et scratch !!! la Uno c'est la plus utilisée et la moins cher, la nano c'est une Uno mais en plus petit et un peu plus cher ( parfait pour de l'électronique embarquée) et tu la méga qui a beaucoup beaucoup plus d'entrées et sorties pour des très gros projets et plus cher donc pour ton projet une Uno sera très bien.
Raspberry ça fait très riche et très compliqué pour un premier projet mais raspberry pourrait te servir pour contrôler plusieurs stand de tir par exemple !!
Pour les servomoteurs il en existe tellement que des fois on s'y perd . Pour ton projet il ne t'en faut pas des hyper fort, pour ton information il existe certains servo qui ont un tel couple que tu ne peux les tourner a la main sans un effet levier et ce n'est pas des servos très coûteux.
Je partirai comme thermo_nono sur de la vis sans fin pour le linéaire car la vis supporterait le poids du servo et la cible et je partirai sur 2 moteur pas a pas avec 2 servo sur chaque vis sans fin et ça te donnera pas mal de possibilités.
Après pour les capteurs franchement c'est bien d'y penser mais je pense que c'est le plus important dans l'immédiat.
Perso et je n'ai que mon avis pour un premier projet je te conseillerais de te faire un schéma de ce que tu aimerais faire, le cahier des charges est fait via la description de ton projet. Ensuite tu décompose ton projet en différentes partie par exemple : actionner les cibles de haut en bas, actionner les cibles latéralement, le menu (temps, points, nombre de cible).. chaque partie déjà faite t'emmenera plus loin en assemblant petit a petit tes différentes parties. Franchement pour ce faire la main commence par un menu avec 6 led deux potentiomètre du genre 3 choix pour un potar et 3 choix pour l'autre et chaque led allumé sera l'option que tu as choisis, perso je commencerai par ça, pas de mécanique, pas de calcul de force et de vitesse juste de la programmation et tu aura un très bon aperçu d'arduino et de la difficulté du débutant. Et ensuite avec ça tu rajoute des moteurs pour bouger tes cibles latéralement avec une partie contrôle déjà faite tu verra de suite si ce que tu fais répond à tes attentes.
Tout cela n'est que mon avis perso, j'espère que d'autres le donneront et que tu feras ta propre opinion par rapport a ton idée et tes compétences.
Pourquoi Arduino parce qu'il a un langage proche du langage C, malgré qu'il a un langage spécifique ce langage te permet d'utiliser par la suite toute sorte de carte qui sont programmable avec IDE Arduino et scratch !!! la Uno c'est la plus utilisée et la moins cher, la nano c'est une Uno mais en plus petit et un peu plus cher ( parfait pour de l'électronique embarquée) et tu la méga qui a beaucoup beaucoup plus d'entrées et sorties pour des très gros projets et plus cher donc pour ton projet une Uno sera très bien.
Raspberry ça fait très riche et très compliqué pour un premier projet mais raspberry pourrait te servir pour contrôler plusieurs stand de tir par exemple !!
Pour les servomoteurs il en existe tellement que des fois on s'y perd . Pour ton projet il ne t'en faut pas des hyper fort, pour ton information il existe certains servo qui ont un tel couple que tu ne peux les tourner a la main sans un effet levier et ce n'est pas des servos très coûteux.
Je partirai comme thermo_nono sur de la vis sans fin pour le linéaire car la vis supporterait le poids du servo et la cible et je partirai sur 2 moteur pas a pas avec 2 servo sur chaque vis sans fin et ça te donnera pas mal de possibilités.
Après pour les capteurs franchement c'est bien d'y penser mais je pense que c'est le plus important dans l'immédiat.
Perso et je n'ai que mon avis pour un premier projet je te conseillerais de te faire un schéma de ce que tu aimerais faire, le cahier des charges est fait via la description de ton projet. Ensuite tu décompose ton projet en différentes partie par exemple : actionner les cibles de haut en bas, actionner les cibles latéralement, le menu (temps, points, nombre de cible).. chaque partie déjà faite t'emmenera plus loin en assemblant petit a petit tes différentes parties. Franchement pour ce faire la main commence par un menu avec 6 led deux potentiomètre du genre 3 choix pour un potar et 3 choix pour l'autre et chaque led allumé sera l'option que tu as choisis, perso je commencerai par ça, pas de mécanique, pas de calcul de force et de vitesse juste de la programmation et tu aura un très bon aperçu d'arduino et de la difficulté du débutant. Et ensuite avec ça tu rajoute des moteurs pour bouger tes cibles latéralement avec une partie contrôle déjà faite tu verra de suite si ce que tu fais répond à tes attentes.
Tout cela n'est que mon avis perso, j'espère que d'autres le donneront et que tu feras ta propre opinion par rapport a ton idée et tes compétences.
1ère place Robot Warrior 2019 humanoïdes autonome
#6
Forthman
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
#7
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 23 juin 2019 - 10:14
@Amhnemus Pour les servomoteurs qui sont résistants, c'est une très bonne nouvelle. Je pourrai donc faire mon deuxième projet avec des plates (qui sont plus lourdes).
@thermo_nono & Amhnemus Par contre, je ne suis pas sûr de comprendre pour la vis sans fin. Le moteur pas à pas ferait tourner la vis à travers un écrou, dans un sens où dans l'autre ce qui permettrait à la vis de se déplacer latéralement ?
Si c'est bien ce que j'ai compris, j'ai deux questions :
- la cible étant accrochée à l'extrémité de la vis, elle va tourner avec elle... Ça n'est pas possible. Déjà elle va cogner mon dispositif de dissimulation de la cible. À moins que j'eloigne le bot de celui ci (pas toujours possible) . Mais reste le problème que la cible va faire des tours sur elle même : tête en haut / tête en bas...
- je me suis renseigné sur les moteurs pas à pas, il semblerait qu'ils soient très précis mais lents, même si débridés. Il faudrait que ma cible puisse sortir de sa cachette ou rentrer en une demi seconde max. Sinon je perds le côté ludique et de surprise lol pourtant j'ai lu que les imprimantes utilisent cette façon de faire et elles sont rapides.
Idéalement, 150cm en 0,5 seconde. C'est peut être trop non ? La largeur d'un homme moyen disons 100cm + 50cm de marge pour m'éloigner du dispositif de dissimulation de la cible.
Ou alors je mets un servomoteur au bout de la vis aussi qui me permet de changer entre cible de face et de profil. Ainsi je n'aurais que 50 cm en 0,5sec à parcourir, le servomoteur se chargerait de déployer la cible de 100cm. C'est jouable avec un moteur pas à pas ?
J'ai commencé à regarder ton pdf thermo_nono. Mais je manque de connaissance pour faire mon choix. Je ne sais pas ce qui est adaptable à arduino, ni comment l'adapter, ni quelles sont les limitations. Pour l'instant je mange des tutos en gardant bien au chaud le pdf pour y revenir très prochainement.
@forthman de vraies balles. Oui mon deuxième projet sera celui-ci. Le premier je veux transpercer des cibles en cartons pour voir où se trouvent mes impacts de balles. Les plates (cibles basculantes en fonte) t'indiquent qu'elles ont été touché mais pas l'emplacement.
@thermo_nono & Amhnemus Par contre, je ne suis pas sûr de comprendre pour la vis sans fin. Le moteur pas à pas ferait tourner la vis à travers un écrou, dans un sens où dans l'autre ce qui permettrait à la vis de se déplacer latéralement ?
Si c'est bien ce que j'ai compris, j'ai deux questions :
- la cible étant accrochée à l'extrémité de la vis, elle va tourner avec elle... Ça n'est pas possible. Déjà elle va cogner mon dispositif de dissimulation de la cible. À moins que j'eloigne le bot de celui ci (pas toujours possible) . Mais reste le problème que la cible va faire des tours sur elle même : tête en haut / tête en bas...
- je me suis renseigné sur les moteurs pas à pas, il semblerait qu'ils soient très précis mais lents, même si débridés. Il faudrait que ma cible puisse sortir de sa cachette ou rentrer en une demi seconde max. Sinon je perds le côté ludique et de surprise lol pourtant j'ai lu que les imprimantes utilisent cette façon de faire et elles sont rapides.
Idéalement, 150cm en 0,5 seconde. C'est peut être trop non ? La largeur d'un homme moyen disons 100cm + 50cm de marge pour m'éloigner du dispositif de dissimulation de la cible.
Ou alors je mets un servomoteur au bout de la vis aussi qui me permet de changer entre cible de face et de profil. Ainsi je n'aurais que 50 cm en 0,5sec à parcourir, le servomoteur se chargerait de déployer la cible de 100cm. C'est jouable avec un moteur pas à pas ?
J'ai commencé à regarder ton pdf thermo_nono. Mais je manque de connaissance pour faire mon choix. Je ne sais pas ce qui est adaptable à arduino, ni comment l'adapter, ni quelles sont les limitations. Pour l'instant je mange des tutos en gardant bien au chaud le pdf pour y revenir très prochainement.
@forthman de vraies balles. Oui mon deuxième projet sera celui-ci. Le premier je veux transpercer des cibles en cartons pour voir où se trouvent mes impacts de balles. Les plates (cibles basculantes en fonte) t'indiquent qu'elles ont été touché mais pas l'emplacement.
#8
Amhnemus
-
- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 24 juin 2019 - 04:52
@MupaY pour la vis sans fin il y a juste le moteur et la vis qui tourne, la cible sera elle sur un support sur la vis quand la vis tourne le support va d'avant en arrière. Sinon pour plus de compréhension un petit coup de youtube et regarde un tuto de DIY de CNC qui te montrera le principe de la vis sans fin.
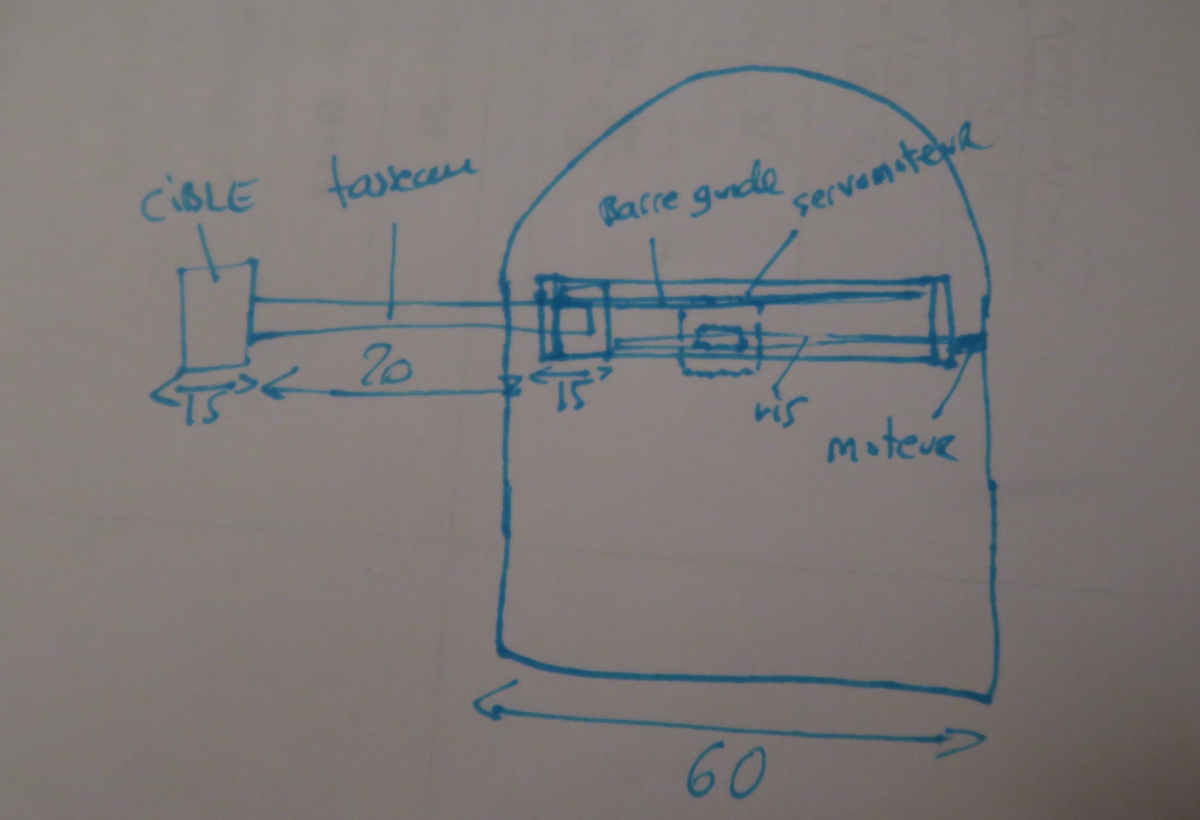
J'aimerais aussi connaître a peux la taille de ton projet, taille des cibles, taille du cadre pour y réfléchir d'avantage et pouvoir mieux te renseigner.
J'aimerais aussi connaître a peux la taille de ton projet, taille des cibles, taille du cadre pour y réfléchir d'avantage et pouvoir mieux te renseigner.
1ère place Robot Warrior 2019 humanoïdes autonome
#9
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 24 juin 2019 - 07:28
ha oui ! c'est du grand quand-même 
0.5s pour faire un mouvement de 1.5m, tu peux oublier avec de la vis à billes 
Mais du coup si ta cible fait 1.5m de haut, ça veut dire que la zone en dessous pour se cacher doit faire plus d'1.5m, donc une hauteur totale déployée de plus de 3m
#10
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 24 juin 2019 - 10:50
Bon, j'ai revu à la baisse mes attentes  Vouloir faire un tout en un, c'est compliqué pour un premier projet ! En fait, je vais juste me contenter de faire quelque chose ressemblant au Targabot ! Pour mes autres envies, je ferai d'autres bots dédiés à ces dernières.
Vouloir faire un tout en un, c'est compliqué pour un premier projet ! En fait, je vais juste me contenter de faire quelque chose ressemblant au Targabot ! Pour mes autres envies, je ferai d'autres bots dédiés à ces dernières.
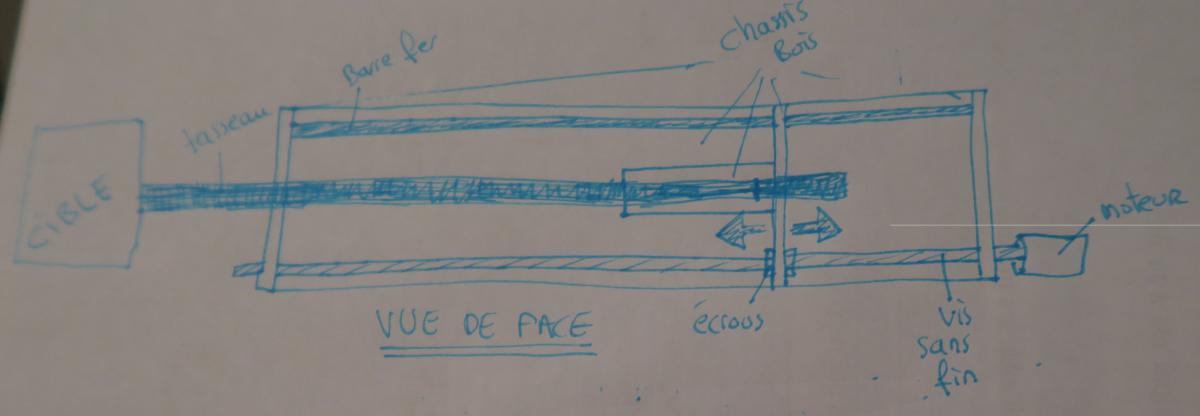
@Amhnemus Du coup, j'ai fait mes devoirs : j'ai regardé des vidéos. J'ai compris ce qu'y m'échappait : une barre guide empêche le support de tourner avec la vis. J'ai essayé de rendre compatible ce que j'ai vu avec mes besoins. Dis moi si c'est ce que tu avais en tête ou si je suis à coté de la plaque !
@Forthman Ayant modifié le projet pour le simplifier, normalement j'aurais 50 cm à parcourir en 0.5 sec! Faisable à ton avis ? Allez 1 seconde si il faut ^^
Bon sinon, j'ai regardé un peu et il semblerait qu'un "moteur à courant continu" boosté avec des piles et les composants nécessaires au bon fonctionnement, ça tournerait pas mal vite. Peut être, est-ce qu'il me faut ? Que me conseillez-vous ?
Je vous ai linké quelques croquis du projet. C'est pas à l'échelle mais je pense que ça ira. Si je ne suis pas clair sur certains points, dites le moi.
Dispositif en vue de dessus :
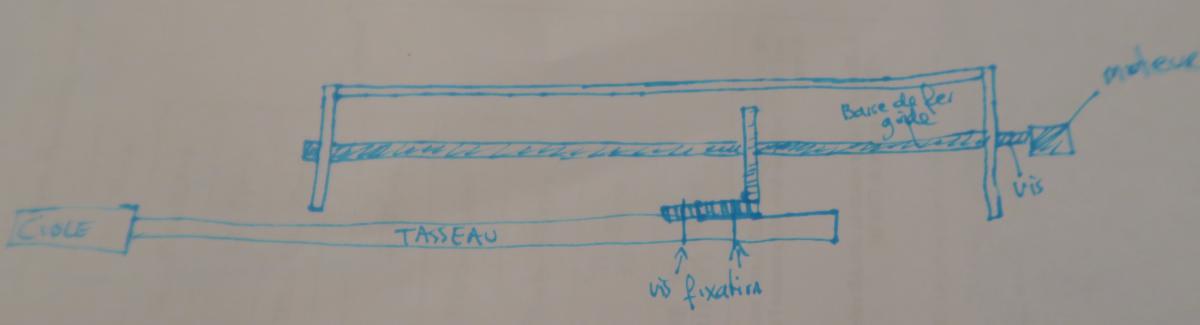
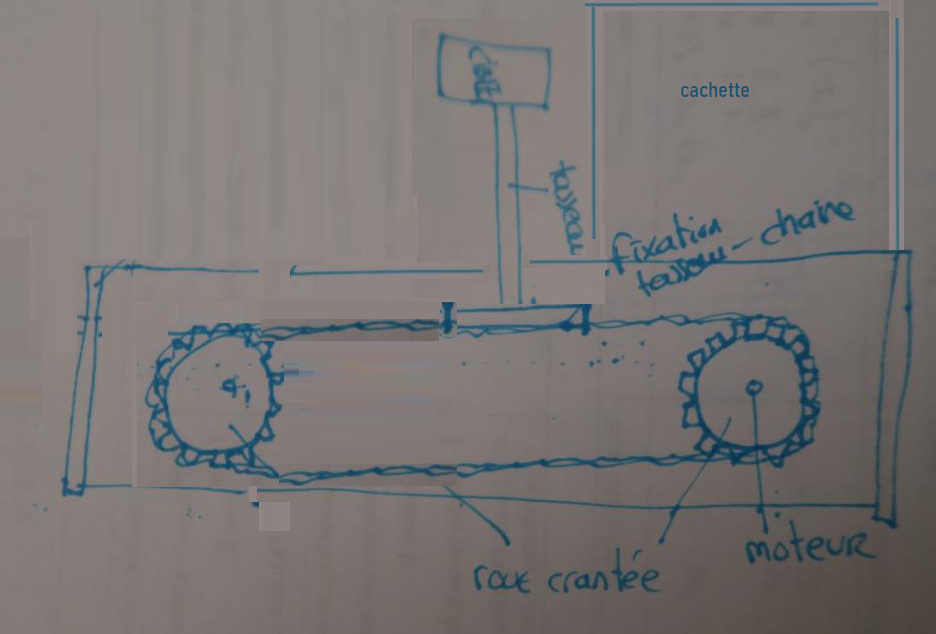
Dispositif vue de face :
L'ensemble de la ciblerie :
J'ai essayé de reproduire le slider des imprimantes en y fixant un tasseau de bois avec la cible. Le tout fixé sur un servomoteur ! Vos avis, vos conseils ?
Encore merci, ce projet commence à prendre forme grâce à vous ! Bientôt je pourrai commander les pièces et là, ça deviendra du concret ! J'ai trop hâte ! 
#11
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 25 juin 2019 - 08:24
Les vis à billes ont un pas de 5 ou 10mm en standard, on peut trouver des pas plus longs, mais pour l'instant je pars sur du standard.
500mm ça fait 50 tours pour un pas de 10mm
sir ces 500mm doivent être effectués en 0.5s ça fait 100 tours/seconde pour la vis soit 6000 tours/minutes
ça commence à faire vite pour une vis...
pourquoi ne pas partir sur une poulie/courroie crantée ? Tu n'as pas franchement besoin de précision si ?
- thermo_nono et MupaY aiment ceci
#12
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 25 juin 2019 - 10:44
Merci pour ta réponse Forthman.
J'ai trouvé ce moteur : https://www.robot-ma...eur-cc-15v.html
13 000 tr/min soit 216,67 tours à la seconde. Je comptais trouver une vis avec un pas super large. Même si ralentit par frottement ou autre résistance, on devrait être bon ? Qu'en penses tu ?
Non, je n'ai pas besoin d'une grande précision.
Je pense qu'effectivement avec une courroie crantée ça serait plus réactif puisque c'est dans le sens direct du mouvement voulu.
Ne te moques pas mais je suis nul dans ce domaine. Je ne connais pas toutes les méthodes pour générer des forces ou des mouvements. J'ai réfléchi et j'ai trouvé une façon d'appliquer cette méthode au projet :
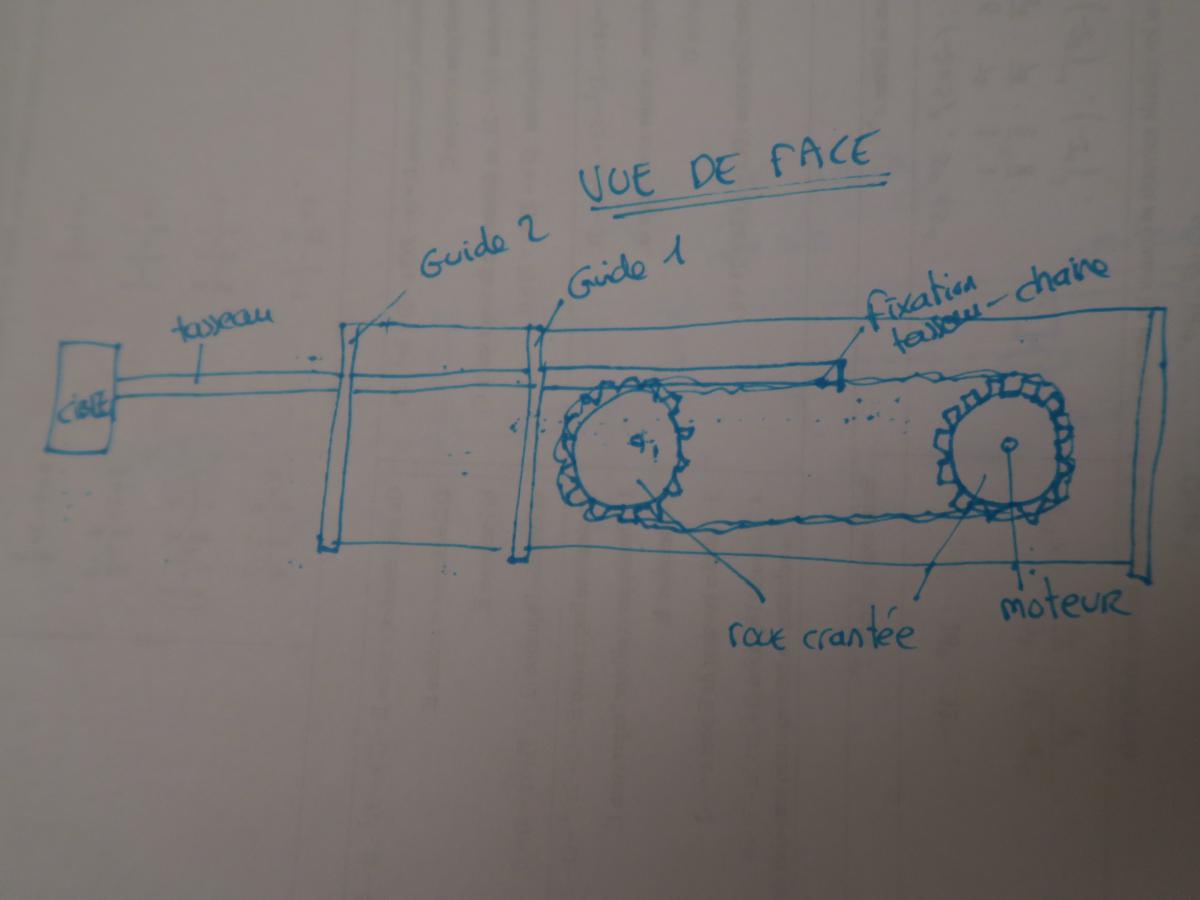
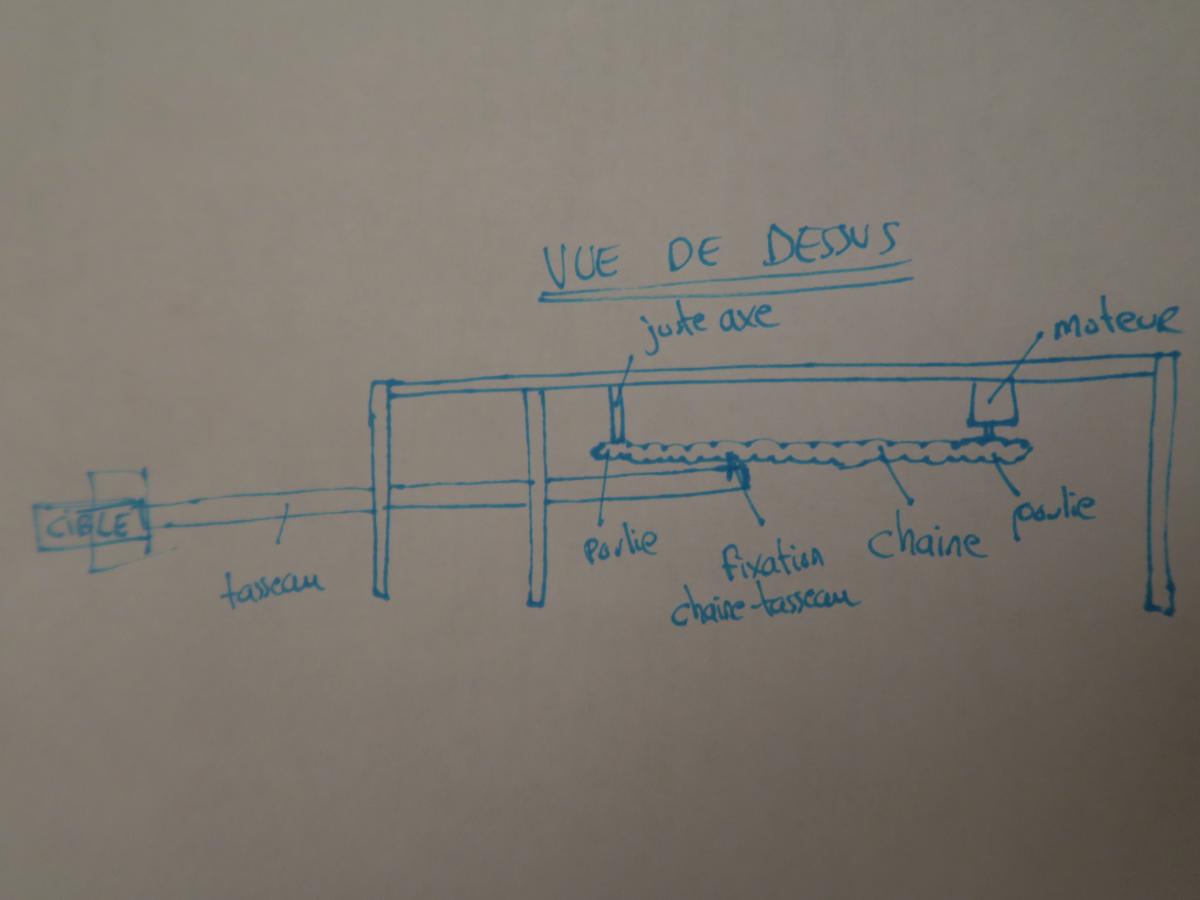
C'est ce à quoi tu pensais comme façon de faire ? Ou il y a plus optimisé ?
PS : Ah zut, je suis parti sur une roue crantée + une chaine et pas une courroie crantée... Mais bon l'idée est la même.
#14
Mike118
-

- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 26 juin 2019 - 12:41
Merci pour ta réponse Forthman.
J'ai trouvé ce moteur : https://www.robot-ma...eur-cc-15v.html
13 000 tr/min soit 216,67 tours à la seconde. Je comptais trouver une vis avec un pas super large. Même si ralentit par frottement ou autre résistance, on devrait être bon ? Qu'en penses tu ?
Ce moteur est minuscule... Il ne conviendra pas pour ton projet ...
Il va vite mais a très peu de couple...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#15
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 26 juin 2019 - 02:52
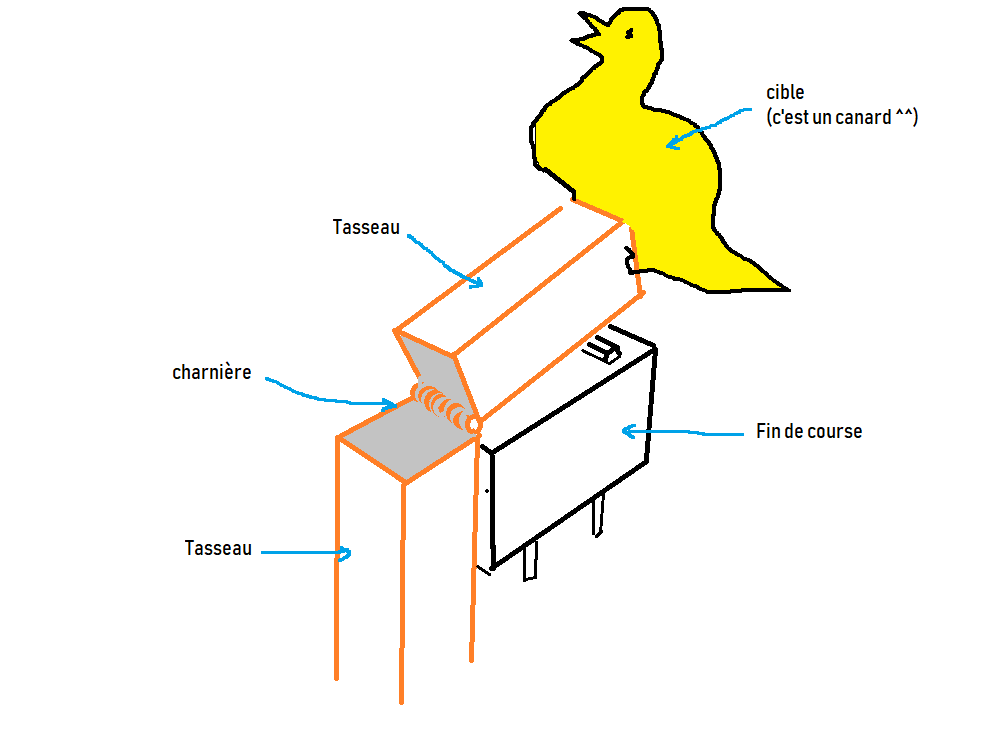
@thermo_nono Premièrement : hey mon uvre artistique, pas touche ahaha Les droits d'auteur mon petit bonhomme lol
Deuxièmement : bon OK, tu dessines vraiment mieux que moi. Maintenant je n'oserai plus poster de schéma hahah quant au canard tu n'avais pas besoin de préciser, on s'approche du photo réalisme là.
Blagues à part, ton idée me fait penser aux canards de la foire avec la carabine à plombs. Bah sûrement le projet dont tu me parlais qui te trottait dans la tête je le ferai sûrement plus tard aussi si je m'achète une carabine à plomb. Ça pourrait être amusant avec les enfants ou des amis !
Hum, pour ce projet plus particulièrement, ce n'est pas tout à fait ce que je recherche pour plusieurs raisons : c'est prévisible. Je sais où la cible va sortir. J'ai juste à l'attendre.
Si tu regardes bien ce que je voudrais faire : https://m.youtube.co...CT2d7mqY&t=693s
Tu peux constater que je vais coder pour que ça soit totalement aléatoire sur 180 degrés. Ça augmente grandement la difficulté. Plus de possibilité d'attendre, que du pur reflex.
Si j'arrive à en faire un, je ferais un second dispositif comme sur la vidéo, qui fera le no shoot (genre d otage à ne pas toucher qui passe devant la cible à toucher). Ça aussi ça augmentera la difficulté. Très ludique !
Pour la cible à bascule, deux problèmes. le fait que ça soit sur 180 degrés, ça empêche cette méthode. D'un côté il aura la tête en haut et de l'autre la tête en bas.
Ensuite pour encaisser du 9mm ou du 5.56, il faut un métal dur ! Lors de mes compétitions ou de mes entraînements, on utilise des plates (cercle en fonte ou en Ar500). C'est lourd ! Là si Mike118 apprenait que je veux porter et déplacer une plate avec un petit moteur à petits couples, il hallucinerait encore plus hahaha
Ensuite une plate c'est onéreux. Genre plus de 100e.
@Mike118 Content que tu te joignes à nous et merci pour cet avertissement et cette explication. J'allais faire une grosse bêtise. OK donc quand je regarde pour des moteurs avec plus de couples, le nombre de tour par minute est faible.
Dans la boutique, en vois tu un plus adapté ? Saurais tu estimer le (k)G.cm nécessaire ?
Si non, Est ce a cause des broches digitales de l arduino qui ne peuvent délivré plus de 40mA en courant de sortie ? Si oui un YouTuber me donne une astuce que tu dois connaître pour booster la puissance avec des piles :https://m.youtube.co...CT2d7mqY&t=693s
Serait ce suffisant ?
Deuxièmement : bon OK, tu dessines vraiment mieux que moi. Maintenant je n'oserai plus poster de schéma hahah quant au canard tu n'avais pas besoin de préciser, on s'approche du photo réalisme là.
Blagues à part, ton idée me fait penser aux canards de la foire avec la carabine à plombs. Bah sûrement le projet dont tu me parlais qui te trottait dans la tête je le ferai sûrement plus tard aussi si je m'achète une carabine à plomb. Ça pourrait être amusant avec les enfants ou des amis !
Hum, pour ce projet plus particulièrement, ce n'est pas tout à fait ce que je recherche pour plusieurs raisons : c'est prévisible. Je sais où la cible va sortir. J'ai juste à l'attendre.
Si tu regardes bien ce que je voudrais faire : https://m.youtube.co...CT2d7mqY&t=693s
Tu peux constater que je vais coder pour que ça soit totalement aléatoire sur 180 degrés. Ça augmente grandement la difficulté. Plus de possibilité d'attendre, que du pur reflex.
Si j'arrive à en faire un, je ferais un second dispositif comme sur la vidéo, qui fera le no shoot (genre d otage à ne pas toucher qui passe devant la cible à toucher). Ça aussi ça augmentera la difficulté. Très ludique !
Pour la cible à bascule, deux problèmes. le fait que ça soit sur 180 degrés, ça empêche cette méthode. D'un côté il aura la tête en haut et de l'autre la tête en bas.
Ensuite pour encaisser du 9mm ou du 5.56, il faut un métal dur ! Lors de mes compétitions ou de mes entraînements, on utilise des plates (cercle en fonte ou en Ar500). C'est lourd ! Là si Mike118 apprenait que je veux porter et déplacer une plate avec un petit moteur à petits couples, il hallucinerait encore plus hahaha
Ensuite une plate c'est onéreux. Genre plus de 100e.
@Mike118 Content que tu te joignes à nous et merci pour cet avertissement et cette explication. J'allais faire une grosse bêtise. OK donc quand je regarde pour des moteurs avec plus de couples, le nombre de tour par minute est faible.
Dans la boutique, en vois tu un plus adapté ? Saurais tu estimer le (k)G.cm nécessaire ?
Si non, Est ce a cause des broches digitales de l arduino qui ne peuvent délivré plus de 40mA en courant de sortie ? Si oui un YouTuber me donne une astuce que tu dois connaître pour booster la puissance avec des piles :https://m.youtube.co...CT2d7mqY&t=693s
Serait ce suffisant ?
#16
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 26 juin 2019 - 06:06
Faire tourner une vis à billes à plus de 6000 trs/min ça devient compliqué (même bien avant) pour des problèmes de vibrations, et de flambage.
Même sans le faire exprès, ton idée de pignons+chaîne est pas mal du tout ! 
en plus, si tu te fixes sur le coté de la chaîne, et que tu intercale une bielle entre la chaîne et la partie coulissante, tu peux faire le trajet entrée/sortie
de la cible sans changer le sens du moteur.
- plus de réactivité
- plus aucun risque de casse au cas où le capteur fin de course merdouille
- pas d'inversion de sens du moteur (pas de pont en H)
Par contre, avant d'acheter quoi que ce soit, il faudra mettre les mains dans le cambouis des maths et de la physique, sinon tu vas droit dans le mur 
(edit : j'ai ajouté "aucun" car merci la langue Française pour ce "plus" qui peut donner deux sens totalement différents avec la phrase "plus de risque"  )
)
#17
MupaY
-
- Membres
- 9 messages
Nouveau membre
Posté 26 juin 2019 - 12:13
Pour la vis oui ça paraît logique. Fallait connaître les limites. Merci pour l'information.
Ouh la. Si je dois combler mes lacunes en physique et en math avant de me lancer dans mes achats et de construire mon projet... Bah j'aurais pas eu le temps de m'amuser avec ma cible réactive avant ma mort ! 😅
Il est néanmoins vrai qu'il va falloir s'y mettre. Actuellement mes connaissances limitées m'empêche de calculer le couple de moteur dont j'ai besoin par exemple. J'avais commencé à calculer.
Calcul couples moteur
Tasseau Sapin 30cm en 50x20 : 100g
Carton 15x15 : 135g
Du coup, le moteur devra pousser 235g + frottements sur les guides + force nécessaire pour faire tourner les roues en prenant en compte le poids le la chaine et le frottement sur les axes.
J'ai commencé à calculer le frottement statique répartit sur le guide 1 et 2 :
Ff = Fn.yf
Ff : frottement statique
FN : Poids
yf(nombre) : coefficient de frottement statique (bois sur bois je prends 0,50 et comme c'est sur un plan horizontal : 0)
Ff = 2,31 x 0,50 = 1,155
118 + 235 = 353g
Puis je me suis dis, rien ne m'indique que mon calcul soit bon. Et je ne sais même pas quelles roues et quel diamètre je vais utiliser. Je me dis qu'au vue du résultat si je prends un moteur avec du 1,5kg.cm il y a des chances que ça soit suffisant.
Me reste à déterminer le diamètre des roues pour déterminer combien de tour/s j'ai besoin avec mon moteur. On est d'accord que plus la roue est grande, plus fort est le frottement (donc besoin d'un couplé élevé) mais moins on a besoin de faire de tour ?
J'ai commencé à me dire que les makers avec leurs expériences ont du en avoir des moteurs entre les mains et ils savent instinctivement ce qui est possible de faire ou pas avec les différents modèles sans avoir à toujours tout calculer.
L'expérimentation apporte aussi ses connaissances.
Ouh la. Si je dois combler mes lacunes en physique et en math avant de me lancer dans mes achats et de construire mon projet... Bah j'aurais pas eu le temps de m'amuser avec ma cible réactive avant ma mort ! 😅
Il est néanmoins vrai qu'il va falloir s'y mettre. Actuellement mes connaissances limitées m'empêche de calculer le couple de moteur dont j'ai besoin par exemple. J'avais commencé à calculer.
Calcul couples moteur
Tasseau Sapin 30cm en 50x20 : 100g
Carton 15x15 : 135g
Du coup, le moteur devra pousser 235g + frottements sur les guides + force nécessaire pour faire tourner les roues en prenant en compte le poids le la chaine et le frottement sur les axes.
J'ai commencé à calculer le frottement statique répartit sur le guide 1 et 2 :
Ff = Fn.yf
Ff : frottement statique
FN : Poids
yf(nombre) : coefficient de frottement statique (bois sur bois je prends 0,50 et comme c'est sur un plan horizontal : 0)
Ff = 2,31 x 0,50 = 1,155
118 + 235 = 353g
Puis je me suis dis, rien ne m'indique que mon calcul soit bon. Et je ne sais même pas quelles roues et quel diamètre je vais utiliser. Je me dis qu'au vue du résultat si je prends un moteur avec du 1,5kg.cm il y a des chances que ça soit suffisant.
Me reste à déterminer le diamètre des roues pour déterminer combien de tour/s j'ai besoin avec mon moteur. On est d'accord que plus la roue est grande, plus fort est le frottement (donc besoin d'un couplé élevé) mais moins on a besoin de faire de tour ?
J'ai commencé à me dire que les makers avec leurs expériences ont du en avoir des moteurs entre les mains et ils savent instinctivement ce qui est possible de faire ou pas avec les différents modèles sans avoir à toujours tout calculer.
L'expérimentation apporte aussi ses connaissances.
#18
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 26 juin 2019 - 01:08
Je ne pensais même pas aux calculs des frottements, ne sachant pas ce que tu allais choisir comme guidage...
Mais simplement des calculs basiques sur les rapports couples/vitesse/puissance.
Pour la force nécessaire, comme tu pars sur du glissement bois/bois, je serais même plutôt d'avis de faire des essais.
Suivant si le type de bois, le jeu que tu laisses... les valeurs peuvent varier énormément.
On trouve des pesons pour pas très cher. Tu fais un petit montage de glissière avec une cible, et tu testes à la main avec le peson pour contrôler.
Ne pas oublier aussi que le couple d'un moteur est souvent donné à sa vitesse nominale, il faut donc regarder les graphiques (si disponibles)
pour connaître son couple au démarrage (voir aussi le couple de blocage ou maintien)
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

