Bon je ne suis pas encore sûr de participer et donc je ne me suis pas encore officiellement inscrit mais vu qu'on me titille, je vais peut être participer à la toulouse robot race 2019 dans la catégorie roulante.
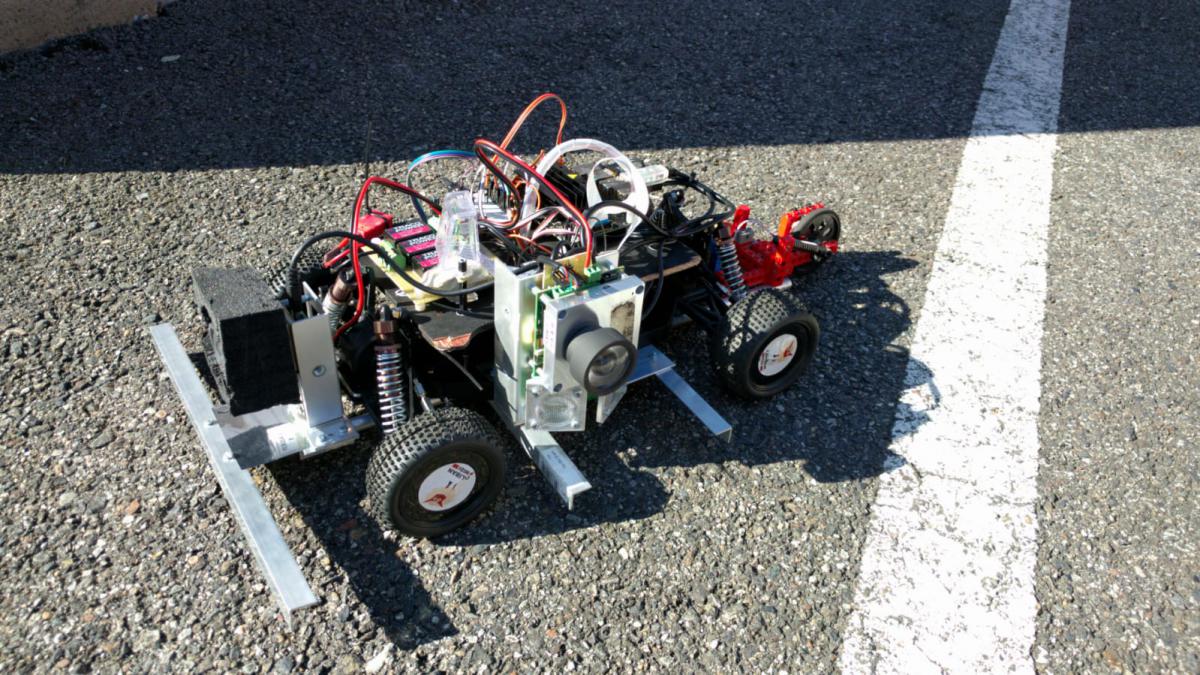
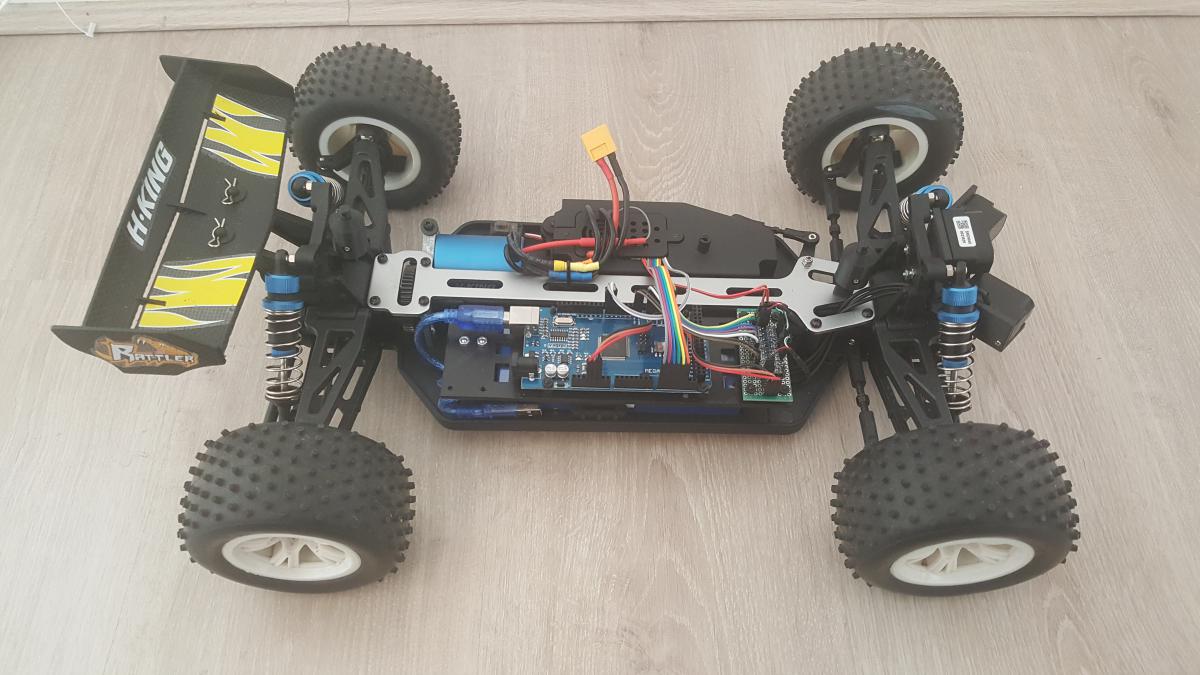
Dans ce cas là, j'envisage de modifier une voiture téléguidée que j'ai, et de lui ajouter des capteurs de distances...
Si je l'avais encore j'aurais bien ressorti RMAD, mais je ne l'ai plus ^^
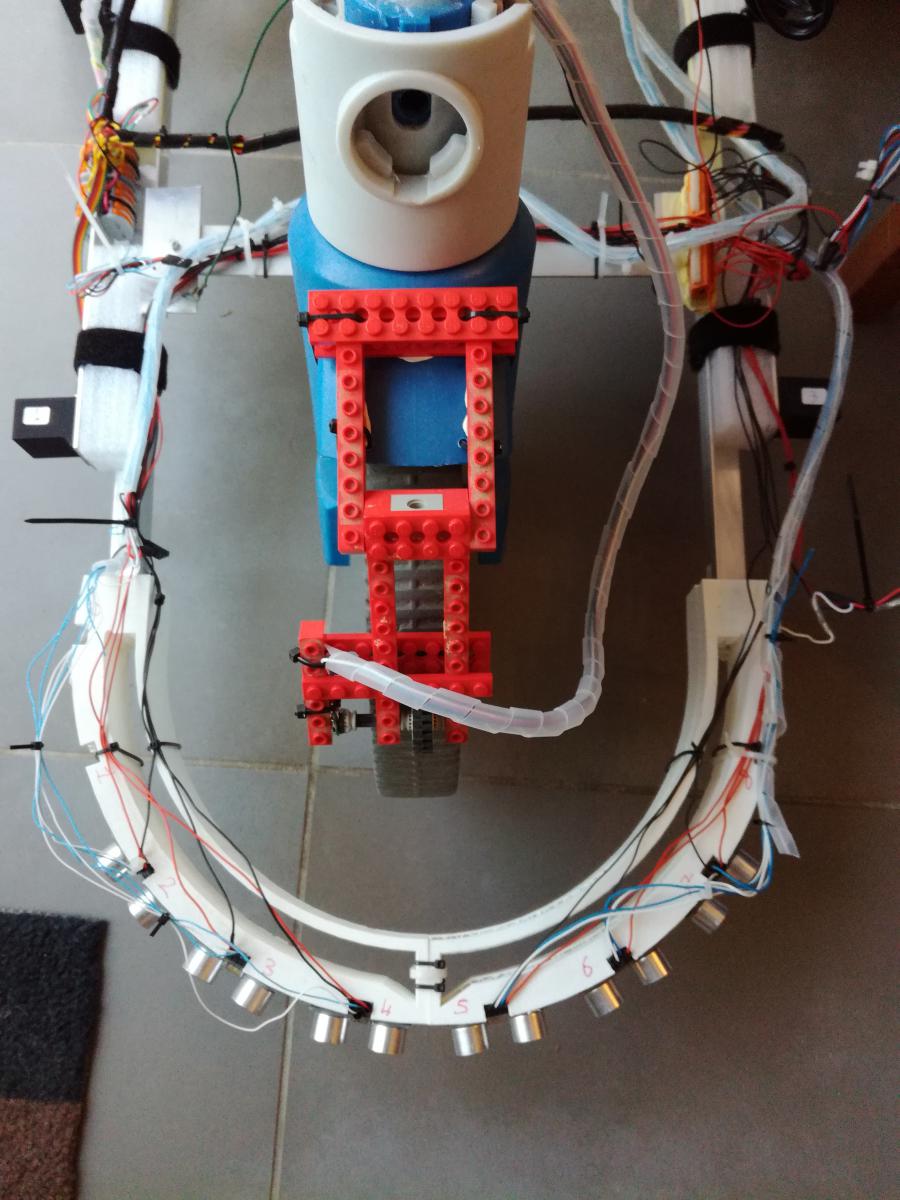
Du coup en guise de capteur je pense ressortir un capteur Shap comme sur RMAD mais cette fois ci j'en utiliserais deux, un pointant de chaque côté vu qu'il y a des murs de part et d'autre sur la toulouse robot race =) .
Vu que ma voiture téléguidée va un peu vite, j'envisage aussi d'ajouter un capteur vers l'avant... Et dans ce cas là j'envisage d'utiliser le tf mini plus . =)
Dans l'idée, les deux sharp pourrait contrôler le servo de direction avec un gain proportionnel à la différence des deux mesures, et le tf mini plus gèrerait la vitesse du robot! =)
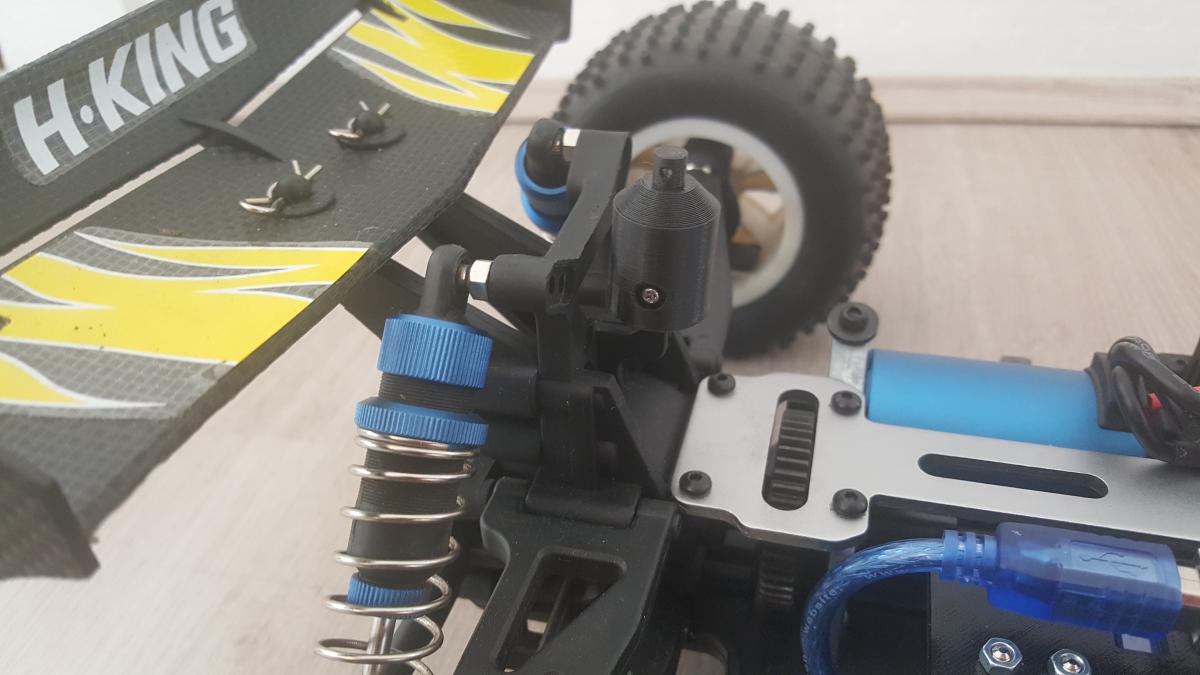
Plus tard je vous posterais quelques photo !