
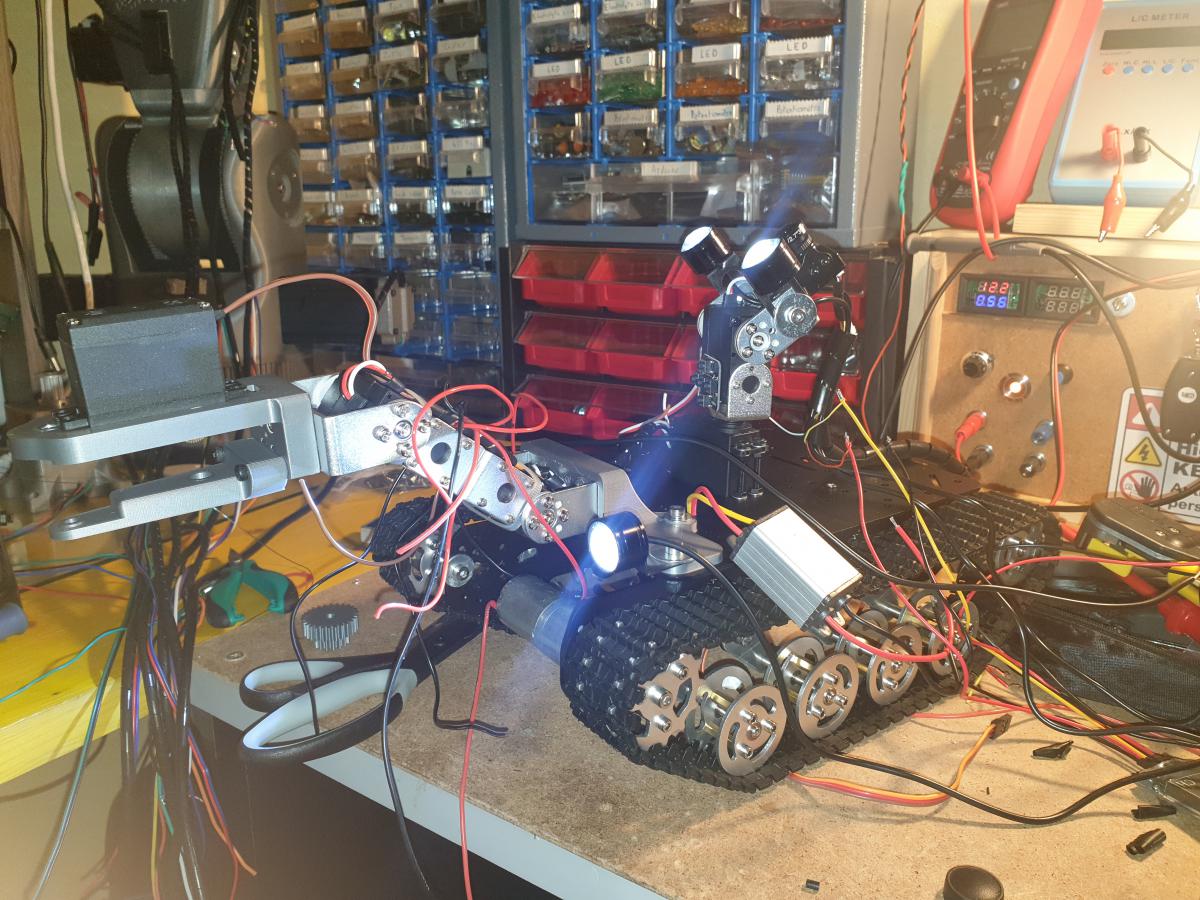
Je souhaite construire un robot explorateur sur un chassis à chenille TS100 avec une caméra FPV Foxeer Mini sur servos avec son émetteur, une petite pince à l'avant genre mandibules et un phare.
Je compte piloter le robot à distance avec une télécommande basée sur un hc12, arduino, ecran lcd et récepteur pour la vidéo et écran tactile nextion pour les commandes

43 réponses à ce sujet
#2

Vinchator
-
- Membres
-

- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 01:55
Je n'est pas encore commencé le projet ni commandé le matériel. Je me demande, par rapport à la télécommande si c'est possible d'utiliser un écran nextion qui utilise tx et rx de l'arduino pour ensuite envoyer les ordres sur le hc12 émetteur. Est ce qu'il risque d'y avoir conflit sur le port série ?
Serait il plus judicieux d'utiliser des joysticks et des slicers hard plutôt que de les faire en soft sur le nextion ?
Serait il plus judicieux d'utiliser des joysticks et des slicers hard plutôt que de les faire en soft sur le nextion ?
#3
Sandro
-

- Modérateur
-
- 1â¯338 messages
Membre chevronné
- Gender:Male
Posté 15 août 2019 - 04:06
Le hc12 utilise aussi le port sériel (ie tx/rx)? Si oui, alors tu vas en effet avoir un problème (sauf erreur de ma part, le port sériel est prévu uniquement pour communiquer avec un seul autre device).
Tu as plusieurs solutions :
- utiliser un autre protocol pour soit l'écran, soit l'éméteur radio (i2c, SPI, ...), ce qui risque d'impliquer de changer de composants
- utiliser un arduino qui dispose de plusieurs ports série (par exemple l'arduino Mega)
- regarder du coté d'une simulation de port série sur d'autres pins (cf : https://www.arduino....eSerialExample): à voir si en termes de performance ça fait l'affaire pour toi
- si l'arduino fonctionne comme maitre, alors il est peut-être possible de switcher le cablage entre l'éméteur et l'écran en fonction d'à qui tu veux t'addresser. Par contre ça implique d'ajouter de l'électronique externe, et un marche pas si l'écran ou l'éméteur peuvent t’envoyer des messages "spontanément"
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#4
Mike118
-

- Administrateur
-
- 10â¯291 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 15 août 2019 - 04:10
En effet il vaut mieux éviter d'avoir deux périphériques UART sur les même pins RX et TX, par contre si tu utilises une arduino mega qui a plusieurs module UART, tu peux contrôler sans problème 4 périphérique UART en même temps chacun sur un des 4 UART différents présents sur l'arduino mega ! =)
- Vinchator aime ceci
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#5
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 05:06
Apparemment on connecte les pin RX TX du hc12 sur des DigitalPin de l'arduino. Du coup les RX TX de l'arduino sont disponibles pour le nextion. Par contre on utilise la bibliothèque SoftwareSerial pour le code du hc12. C'est la que je me demande si il y aura conflit
#6
Sandro
-
- Modérateur
-
- 1â¯338 messages
Membre chevronné
- Gender:Male
Posté 15 août 2019 - 05:15
Attention, les pins digital 0 et 1 (sur un arduino Uno par exemple) SONT les pins RX et TX. Donc si ton exemple utilise ces pins, alors il utilise le port serie hardware.
J'ai jamais utilisé SoftwareSerial, mais le but est justement d'avoir plus de ports serie, donc ça ne devrait pas créer de conflit.
Après, un port SoftwareSerial sera probablement moins rapide que le vrai, et consommera une partie de la puissance de calcul de l'arduino. Sans connaître le détail de ton projet, je pense que ça sufirra, mais pour confirmer il faudrait 1) une personne ayant l'expérience de la librairie SoftwareSerial et 2) une information plus précise des calculs que devra faire ton Arduino
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#7
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 05:30
Non dans les exemples on emploie pas 0 et 1 plutot de 4 à 10 donc ca doit rester du soft.
Du côté émetteur il y aura un joystick pour les mouvements des chenilles ( avancer reculer gauche droite) et 4 sliders ( j'ai choisi des sliders car ils gardent leur position au repos ), 2 pour les mouvements de la camera ( haut bas gauche droite ) et 2 pour la pince ( haut bas fermeture ouverture ) et enfin un bouton pour le projecteur
Du côté récepteur il y aura un l298 pour 2 moteurs dc 12v, 4 servos et un relai à piloter
Du côté émetteur il y aura un joystick pour les mouvements des chenilles ( avancer reculer gauche droite) et 4 sliders ( j'ai choisi des sliders car ils gardent leur position au repos ), 2 pour les mouvements de la camera ( haut bas gauche droite ) et 2 pour la pince ( haut bas fermeture ouverture ) et enfin un bouton pour le projecteur
Du côté récepteur il y aura un l298 pour 2 moteurs dc 12v, 4 servos et un relai à piloter
#9
Sandro
-
- Modérateur
-
- 1â¯338 messages
Membre chevronné
- Gender:Male
Posté 15 août 2019 - 05:39
Bon, du coup, probablement pas de conflit.
Si la télécommande sert juste de télécomande et rien d'autres (pas de retour d'information, pas de gros calculs), alors je pense que le softwareSerial ne devrait pas ralentir de manière perceptible la commande.
En revanche, je réinterroge sur un aspect : tu as une caméra sur ton robot, et vue la portée de tes radios, je suppose que tu ne compte pas toujours avoir ton robot juste à coté de toi (donc j'imagine que tu vas utiliser la caméra pour voir le terrain pour le piloter). Du coup, se pose la question suivante : comment compte tu récupérer et afficher la vidéo? Car là, pour le coup, je ne suis pas sur que l'arduino arrive à suivre (pour de la bonne résolution d'image, je suis même sur que non, vue qu'un Arduino Uno n'a que 2ko de Ram, ce qui est insuffisant pour stocker une image de plus de 40*50 pixels)
- Vinchator aime ceci
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#10
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 05:42
Bon, du coup, probablement pas de conflit.
Si la télécommande sert juste de télécomande et rien d'autres (pas de retour d'information, pas de gros calculs), alors je pense que le softwareSerial ne devrait pas ralentir de manière perceptible la commande.
En revanche, je réinterroge sur un aspect : tu as une caméra sur ton robot, et vue la portée de tes radios, je suppose que tu ne compte pas toujours avoir ton robot juste à coté de toi (donc j'imagine que tu vas utiliser la caméra pour voir le terrain pour le piloter). Du coup, se pose la question suivante : comment compte tu récupérer et afficher la vidéo? Car là, pour le coup, je ne suis pas sur que l'arduino arrive à suivre (pour de la bonne résolution d'image, je suis même sur que non, vue qu'un Arduino Uno n'a que 2ko de Ram, ce qui est insuffisant pour stocker une image de plus de 40*50 pixels)
Pour la video tout est prévu à part avec un émetteur récepteur dédié type drone et un petit lcd sur la télécommande
#11
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 05:44
En effet il vaut mieux éviter d'avoir deux périphériques UART sur les même pins RX et TX, par contre si tu utilises une arduino mega qui a plusieurs module UART, tu peux contrôler sans problème 4 périphérique UART en même temps chacun sur un des 4 UART différents présents sur l'arduino mega ! =)
Je pourrais utiliser un mega de toute façon ma télécommande sera grande par contre j'ai un petit niveau en programmation le code serai difficile pour moi je pense
#12
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 15 août 2019 - 05:50
A la base je voulais utliliser un raspberry et une Picam pour piloter depuis une page html via un petit serveur le problème c'est que avec ma box je ne peut pas avoir d'adresse ip statique mon fournisseur d'acces ne donnant pas cette option à part aux entreprises. C'est pourquoi je me suis orienté différemment. Mais cela m'embête car à la base c'était pour surveiller la maison et les chats depuis le boulot. Si vous avez une autre idée je suis preneur
#13
Sandro
-
- Modérateur
-
- 1â¯338 messages
Membre chevronné
- Gender:Male
Posté 15 août 2019 - 06:18
Si la video est à part, alors je pense qu'une arduino suffira (soit une méga, soit une autre avec du softwareSerial).
Au départ, ton idée était de te connecter directement (via l'IP statique) à une page web stockée sur ton raspberry Pi? Une solution (un peu plus complexe) serait d'avoir un serveur qui contienne la page web depuis laquelle tu consulte (voir commande) le robot. Le raspi, même avec une IP changeante, pourra se connecter au serveur (qui lui sera fixe) pour envoyer la vidéo et récupérer les données. Il y a même des hébergements entièrement gratuits, mais il faudrait voir si les restrictions des versions gratuites permettent de mettre en œuvre ton projet
- Vinchator aime ceci
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#15
Mike118
-
- Administrateur
-
- 10â¯291 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 novembre 2019 - 08:01
Bonjour bonjour après une pause j'ai sérieusement attaqué la construction du robot
A la base je voulais utliliser un raspberry et une Picam pour piloter depuis une page html via un petit serveur le problème c'est que avec ma box je ne peut pas avoir d'adresse ip statique mon fournisseur d'acces ne donnant pas cette option à part aux entreprises. C'est pourquoi je me suis orienté différemment. Mais cela m'embête car à la base c'était pour surveiller la maison et les chats depuis le boulot. Si vous avez une autre idée je suis preneur
Si tu veux tu peux utiliser www.vigibot.com =) c'est fait pour piloter n'importe quel type de robot à distance avec comme matériel juste un raspberry pi et une pi cam =)
Je suis en train de faire un code d'exemple pour mettre en place le protocole de communication avec une arduino pour que la pi transmette tous les ordre reçu par internet sur l'arduino =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#16
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 30 novembre 2019 - 08:05
Bonjour Mike
Merci je vais jeter un oeil mais je suis passé sur une camera foxer avec arduino et un emetteur video dédié...
Pour ta proposition je dois switcher pour un Pi et une Picam ??
Merci je vais jeter un oeil mais je suis passé sur une camera foxer avec arduino et un emetteur video dédié...
Pour ta proposition je dois switcher pour un Pi et une Picam ??
#18
levend
-

- Membres
-
- 5â¯679 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 30 novembre 2019 - 09:19
Tu peux indiquer ce que tu as utilisé comme matériel pour la vidéo ?
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#19
Mike118
-
- Administrateur
-
- 10â¯291 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 30 novembre 2019 - 09:45
Bonjour Mike
Merci je vais jeter un oeil mais je suis passé sur une camera foxer avec arduino et un emetteur video dédié...
Pour ta proposition je dois switcher pour un Pi et une Picam ??
Mince j'ai fais ma proposition un peu tard ...
Oui pour ma proposition le plus simple et le plus économique est d'utiliser une pi + pi cam.
Pas besoin d'avoir une IP fixe , ni d'ouvrir un port c'est la pi sur le robot qui se connecte à vigibot ...
Après c'est une proposition comme une autre si tu as déjà une solution qui fonctionne c'est bon =)
Votre travail sur Vigibot est impressionnant bravo
Je sais pas si tu as vu mais si tu veux nous soutenir on est en ce moment sur kickstarter : https://www.kickstar...or-live-robots/
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




