Ckiquez moi.
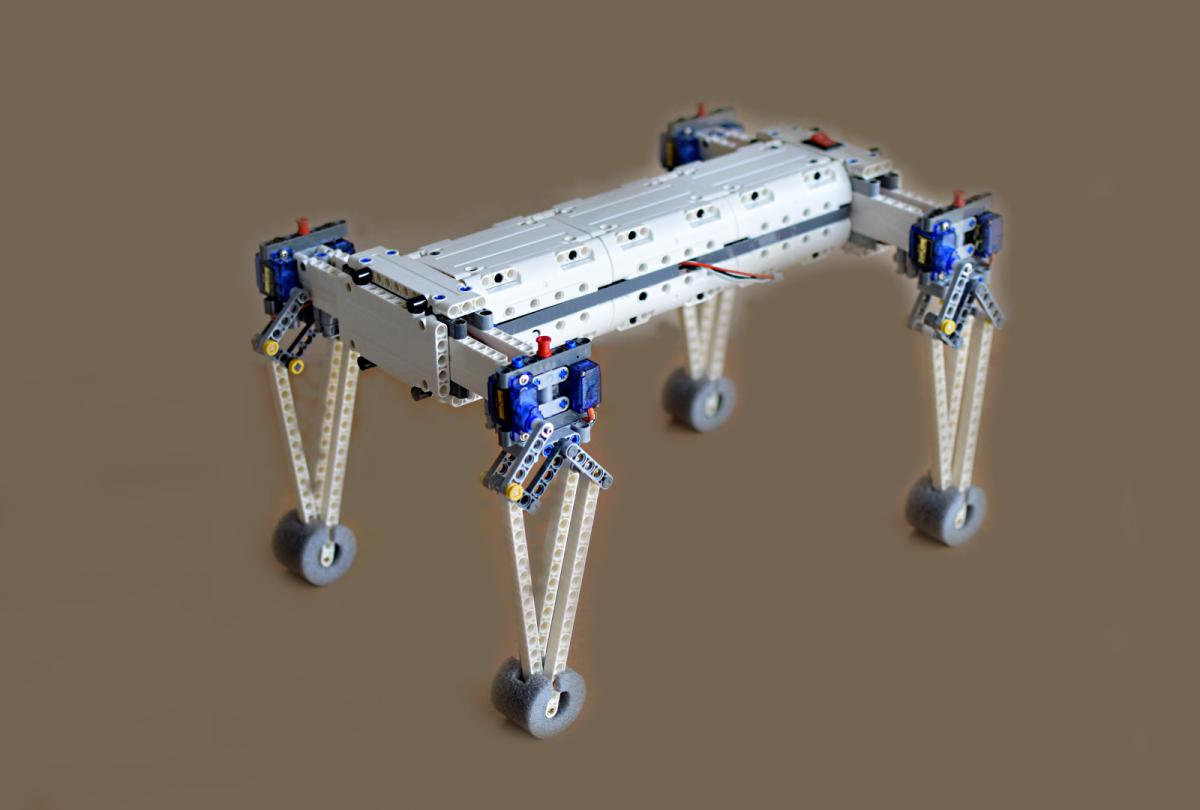
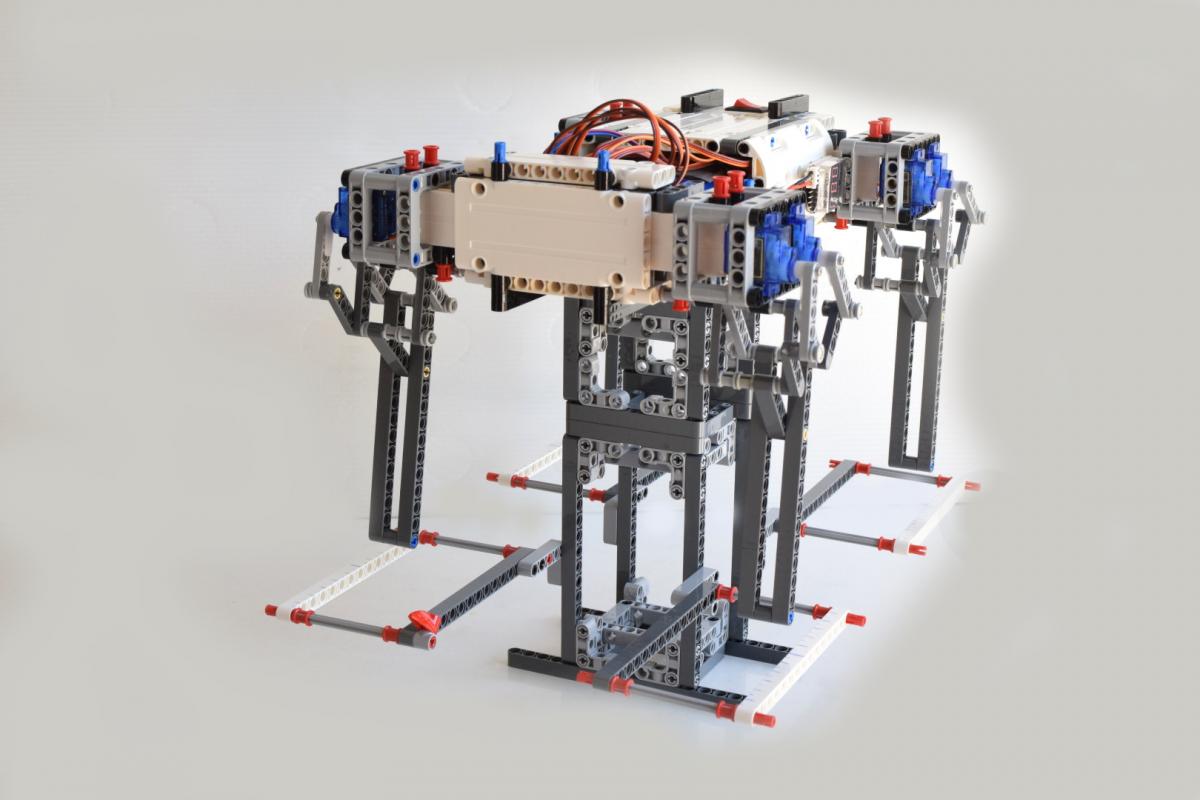
4BQ-1 est mon nouveau quadrupède pour ce début d'année 2020.
Il est basé sur mon mécanisme 4 barres actionnées par parallélépipèdes. https://www.robot-ma...-parralepipede/
Comme vous pouvez le constater, son allure n'a plus rien à voir avec mes précédents quadrupèdes.https://www.robot-ma...rquad/?p=105297
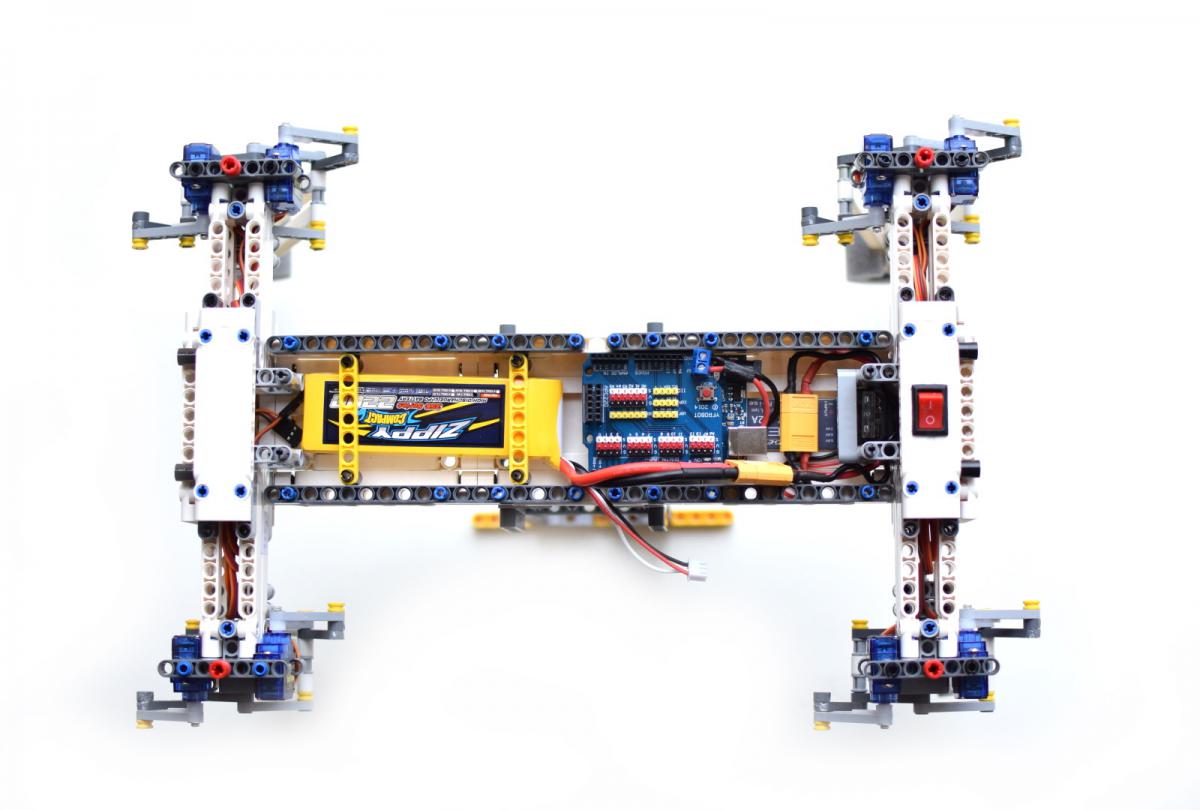
Pour 4BQ-1, j'ai utilisé des panels Lego. Dans le monde Lego, ces panels sont le plus souvent utilisés comme élément de carrosserie ou de parement, mais plus rarement comme élément de structure.
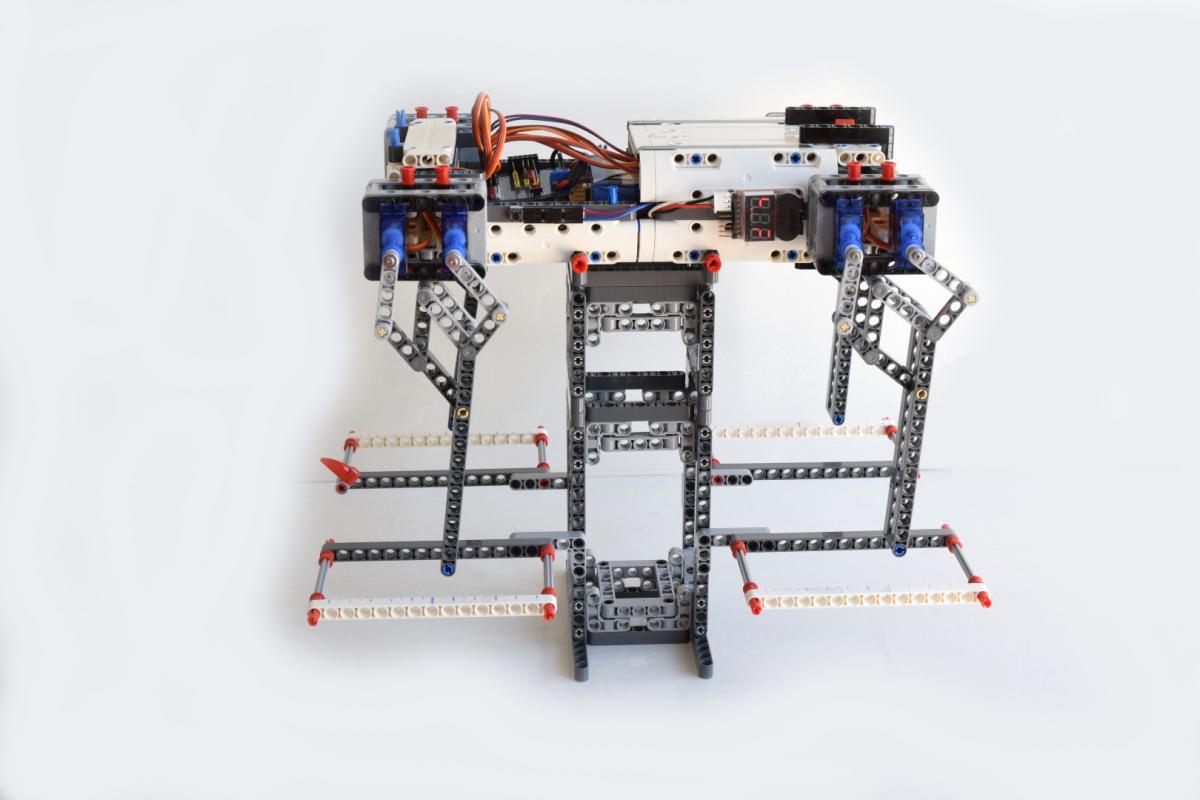
Mais c'est pourtant ce que j'ai fait. J'ai complétement repensé le chassis en intégrant toute l'électronique dans la colonne vertébrale.
Le résultat est très rigide avec un poids équivalent à mes précédents quadrupèdes et me permettra d'augmenter facilement la taille.
Malheureusement, je ne vais pas pouvoir tester à court terme. Bêtement, je suis un peu bloqué par les fils des servos qui sont trop courts. J'ai donc commandé des rallonges.
Je ne sais pas encore si je vais souder ces rallonges directement à l'électronique des servos ou si je vais les utiliser tel quel. A voir.
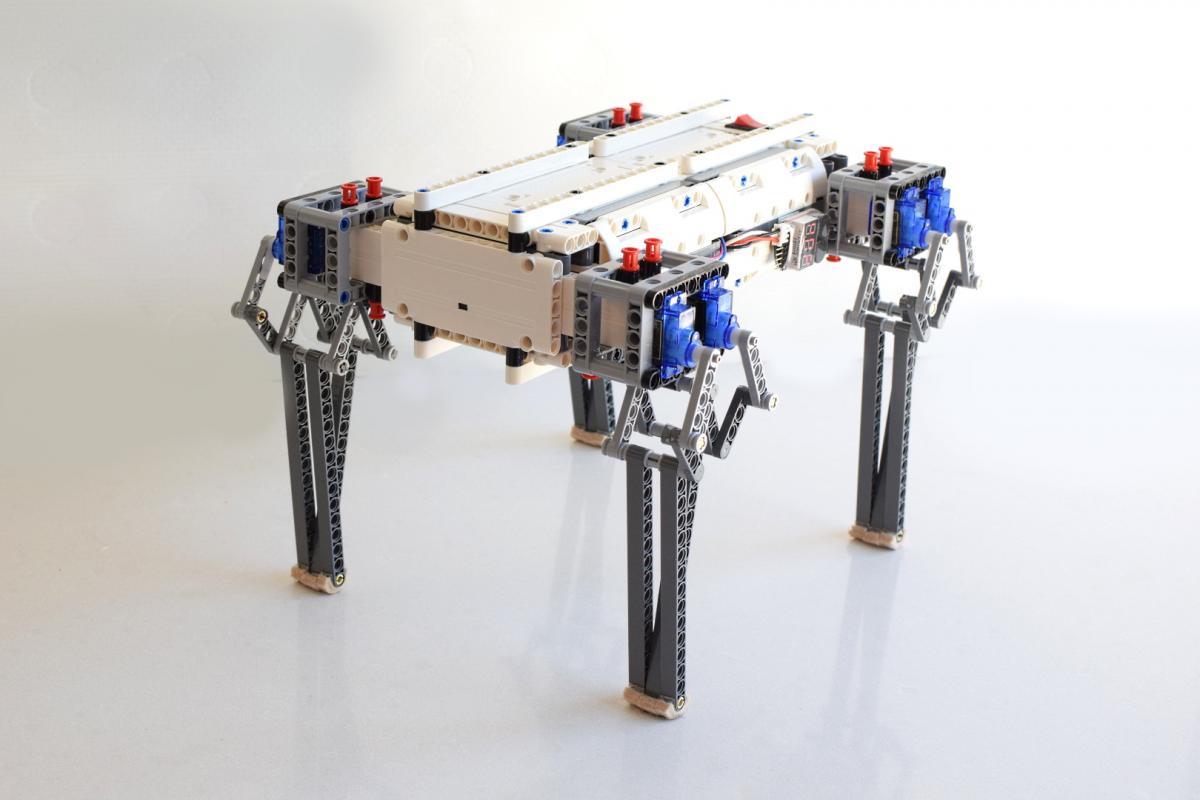
Caratéristiques :
- poids, 785g
- longueur, 33cm
- largeur, 26cm
- Arduino Uno
- Shield Uno R3 V5.0
- 8 servos SG90
- alim HENGE UBEC 5V - 6V - 7.4V - 12A
- batterie 2S
- boom stopper (fusible)